Вам также может понравиться
- AirWatch On-Premise Technical Architecture Guide v7 - 3Документ19 страницAirWatch On-Premise Technical Architecture Guide v7 - 3OscarОценок пока нет
- Spare Parts ListДокумент22 страницыSpare Parts Listsilvio bandeira100% (2)
- EdgeCAM Advanced MillingДокумент111 страницEdgeCAM Advanced MillingRodrigo Luiz100% (1)
- Hardware Manual ACS800-07 Drives (500 To 2800 KW)Документ193 страницыHardware Manual ACS800-07 Drives (500 To 2800 KW)Bhanu Prakash100% (1)
- Chapter 6 - Introduction To An Embedded System and ITs Design - Microcontrollers & Embedded SystemsДокумент16 страницChapter 6 - Introduction To An Embedded System and ITs Design - Microcontrollers & Embedded SystemsAmish VermaОценок пока нет
- As350-200m-1 Rev 10 1-14-21Документ63 страницыAs350-200m-1 Rev 10 1-14-21Carolina Ross100% (1)
- Server Side Javascript EnvironmentДокумент30 страницServer Side Javascript EnvironmentTashfique_Ahme_917150% (6)
- Understanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeОт EverandUnderstanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeMaciej NawrockiОценок пока нет
- COMP 3511 - Operating SystemДокумент38 страницCOMP 3511 - Operating SystemLinh TaОценок пока нет
- QoS LTE IEEE16mДокумент16 страницQoS LTE IEEE16mBityong Yusuf AutaОценок пока нет
- It Q&aДокумент91 страницаIt Q&aKishore KumarОценок пока нет
- Management Programme 3Документ3 страницыManagement Programme 3Satish Kumar KarnaОценок пока нет
- HCIP-LTE-RNP - RNO V1.0 Exam OutlineДокумент6 страницHCIP-LTE-RNP - RNO V1.0 Exam OutlineSemirОценок пока нет
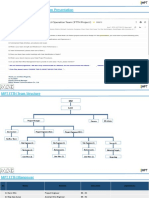
- Content: MPT FTTH Project Operation Team PresentationДокумент44 страницыContent: MPT FTTH Project Operation Team PresentationAung Thein OoОценок пока нет
- 20 Distributed Reliability Protocols PDFДокумент31 страница20 Distributed Reliability Protocols PDFJagmeet Singh0% (2)
- 2012121009121309-Authoring ToolДокумент35 страниц2012121009121309-Authoring ToolIrfan FazailОценок пока нет
- Hardware's Role in Virtual InstrumentationДокумент6 страницHardware's Role in Virtual Instrumentationapi-3725139Оценок пока нет
- CS1252 - Operating Sysytem - (Unit-I)Документ5 страницCS1252 - Operating Sysytem - (Unit-I)Bavya Mohan100% (1)
- Fitsum Mergia-2Документ5 страницFitsum Mergia-2mickyalemuОценок пока нет
- What Is A Computer Network ?: TopicsДокумент30 страницWhat Is A Computer Network ?: TopicsAshish ThapaОценок пока нет
- Abstract:: Parts of LED TVДокумент6 страницAbstract:: Parts of LED TVNabil AbdullahОценок пока нет
- Web Programming: Introduction To HTML and XHTMLДокумент28 страницWeb Programming: Introduction To HTML and XHTMLVeena GadadОценок пока нет
- UMTS Interview Questions and AnswerДокумент24 страницыUMTS Interview Questions and AnswervikydilseОценок пока нет
- Bahir Dar University 1Документ7 страницBahir Dar University 1Anonymous QvkcpUeUcJОценок пока нет
- 4.B - KPIs, Acceptance & PenaltiesДокумент3 страницы4.B - KPIs, Acceptance & PenaltiesHoyeborday Holumeday TemmythayorОценок пока нет
- 8085 LabДокумент13 страниц8085 LabIzza junej0Оценок пока нет
- Sample CV of TEДокумент3 страницыSample CV of TEAlzum ShahadatОценок пока нет
- Developing A Cost-Effective Strategy For Wireless CommunicationsДокумент18 страницDeveloping A Cost-Effective Strategy For Wireless CommunicationsMehari TemesgenОценок пока нет
- Tele-Communication (Telecom) Terms Glossary and DictionaryДокумент188 страницTele-Communication (Telecom) Terms Glossary and DictionaryRaja ImranОценок пока нет
- Data Communication & NetworkДокумент12 страницData Communication & Networkmkhalil94100% (1)
- What Is 3GДокумент15 страницWhat Is 3GShampad AyanОценок пока нет
- Part 2Документ39 страницPart 2Aschalew AyeleОценок пока нет
- MCITP Guide To Microsoft Windows Server 2008 Server Administration (Exam #70-646)Документ52 страницыMCITP Guide To Microsoft Windows Server 2008 Server Administration (Exam #70-646)Shane RockafellowОценок пока нет
- Interrupts and Its TypesДокумент14 страницInterrupts and Its TypesC H A R A NОценок пока нет
- Provisional Acceptance Test PAT Report FДокумент5 страницProvisional Acceptance Test PAT Report Fphantd_hcmОценок пока нет
- CH 21 Network Layer Address Mapping Error Reporting and Multicasting Multiple Choice Questions and Answers PDFДокумент10 страницCH 21 Network Layer Address Mapping Error Reporting and Multicasting Multiple Choice Questions and Answers PDFGayle LokeshОценок пока нет
- Management Information SystemДокумент5 страницManagement Information SystemRaghav WadhwaОценок пока нет
- Telphone NotesДокумент96 страницTelphone NotespeddireddyvenkateswarareddyОценок пока нет
- CAAN ElectronicsДокумент6 страницCAAN ElectronicsNavaraj Baniya100% (1)
- Unit2 - Basic Computer Organization and DesignДокумент46 страницUnit2 - Basic Computer Organization and Designaswini kurraОценок пока нет
- ISP Interview QuestionДокумент3 страницыISP Interview QuestionAssdfjdОценок пока нет
- Assignment 1 Dumisani Mavenyengwa r184880zДокумент11 страницAssignment 1 Dumisani Mavenyengwa r184880zDumisani MavenyengwaОценок пока нет
- Class Diagram Templates To Instantly Create Class Diagrams - Creately BlogДокумент26 страницClass Diagram Templates To Instantly Create Class Diagrams - Creately BlogMd JishanОценок пока нет
- Project - Network DesignДокумент15 страницProject - Network DesignSmarika ShresthaОценок пока нет
- Application of IOT Devices For Smart Car Parking SystemДокумент11 страницApplication of IOT Devices For Smart Car Parking SystemabdelrahmanelfakiОценок пока нет
- Communication InterfaceДокумент10 страницCommunication InterfaceHarini MОценок пока нет
- Cisco 2960 Switch Configuration Commands Step by Step - Configuring CiscoДокумент8 страницCisco 2960 Switch Configuration Commands Step by Step - Configuring CiscoAlamgir Mahmud MiltonОценок пока нет
- Ece-V-Management and Entrepreneurship Notes PDFДокумент132 страницыEce-V-Management and Entrepreneurship Notes PDFRakesh. N murthy0% (1)
- USG 5000 Introduction PDFДокумент37 страницUSG 5000 Introduction PDFviktor220378Оценок пока нет
- 08.705 RTOS Module 2 NotesДокумент30 страниц08.705 RTOS Module 2 NotesAssini HussainОценок пока нет
- Least Slack Time (LST) Scheduling Is AДокумент3 страницыLeast Slack Time (LST) Scheduling Is AsalagramОценок пока нет
- WCDMA Drive Test AnalysisДокумент61 страницаWCDMA Drive Test AnalysiskarthikiwsОценок пока нет
- Contoh Business PlanДокумент32 страницыContoh Business PlanAmirulhelmiОценок пока нет
- CS2301-Software Engineering 2 MarksДокумент17 страницCS2301-Software Engineering 2 MarksDhanusha Chandrasegar SabarinathОценок пока нет
- Shortform Guide: Version: 5.2/1 Edition: 26 January 2015Документ70 страницShortform Guide: Version: 5.2/1 Edition: 26 January 2015Sandro ValenteОценок пока нет
- Fiber Optic Equipment Spec PDFДокумент12 страницFiber Optic Equipment Spec PDFAkashОценок пока нет
- FCN SampleДокумент5 страницFCN SampleRoshun GeorgeОценок пока нет
- Software's Role in Virtual InstrumentationДокумент5 страницSoftware's Role in Virtual Instrumentationapi-3725139100% (1)
- Project ProposalДокумент2 страницыProject ProposalMini BapnaОценок пока нет
- Virtualization For Data-Center AutomationДокумент3 страницыVirtualization For Data-Center Automationupkar computerОценок пока нет
- Chapter 3 - Naming and Threads-1Документ21 страницаChapter 3 - Naming and Threads-1milkikoo shiferaОценок пока нет
- Cross-Layer Resource Allocation in Wireless Communications: Techniques and Models from PHY and MAC Layer InteractionОт EverandCross-Layer Resource Allocation in Wireless Communications: Techniques and Models from PHY and MAC Layer InteractionОценок пока нет
- Sunde: User's Manual For H4 and Earlier ModelsДокумент78 страницSunde: User's Manual For H4 and Earlier ModelsMhegie GaylanОценок пока нет
- AC1300 Mu-Mimo Wi-Fi RouterДокумент7 страницAC1300 Mu-Mimo Wi-Fi Routerlamvan tuОценок пока нет
- At Us700Документ2 страницыAt Us700Jeisson BeltranОценок пока нет
- (Whitepaper) From BlackBerry To BYODДокумент8 страниц(Whitepaper) From BlackBerry To BYODMohammed Toheeb OlusholaОценок пока нет
- CSE423Документ30 страницCSE423SAYYAD RAFIОценок пока нет
- DN Technoverse East I Academia BrochureДокумент6 страницDN Technoverse East I Academia BrochurethemercilessgoddОценок пока нет
- Chapter 2 PediДокумент48 страницChapter 2 PediteklayОценок пока нет
- Picoflow: Continuous Ow Measurement at Low Solid/Air RatiosДокумент4 страницыPicoflow: Continuous Ow Measurement at Low Solid/Air RatiosDuc Duong TichОценок пока нет
- Pilot Lights and Illuminated Pushbuttons Panorama en PDFДокумент4 страницыPilot Lights and Illuminated Pushbuttons Panorama en PDFAndiAttaОценок пока нет
- Oracle 10g SQL I Student's Guide (Vol 1)Документ350 страницOracle 10g SQL I Student's Guide (Vol 1)Kirill GashkovОценок пока нет
- Computaris - Top Testing Suite (Full Demonstration)Документ29 страницComputaris - Top Testing Suite (Full Demonstration)ioana_diaОценок пока нет
- Boyd's Harrisburg-Steelton City Directory 1902 (Pennsylvania) OCRДокумент779 страницBoyd's Harrisburg-Steelton City Directory 1902 (Pennsylvania) OCRKAWОценок пока нет
- Ne7207 Nis Unit 5 Question BankДокумент3 страницыNe7207 Nis Unit 5 Question BankalgatesgiriОценок пока нет
- Namrata's ResumeДокумент2 страницыNamrata's Resumenamrata.rkulkarni88Оценок пока нет
- HP ShortlistДокумент6 страницHP ShortlistNaveen ChaubeyОценок пока нет
- 9A05704 Advanced Computer ArchitectureДокумент4 страницы9A05704 Advanced Computer ArchitecturesivabharathamurthyОценок пока нет
- The Impact of Internet Usage On Students' Success in Selected Senior High Schools in Cape Coast Metropolis, GhanaДокумент18 страницThe Impact of Internet Usage On Students' Success in Selected Senior High Schools in Cape Coast Metropolis, GhanaMeljoy AcdalОценок пока нет
- Computer Networking DissertationДокумент6 страницComputer Networking DissertationPaySomeoneToWriteAPaperForMeCanada100% (1)
- Proiect Web Semantic: Colac Mădălin-Carol Tamaș FlorianДокумент10 страницProiect Web Semantic: Colac Mădălin-Carol Tamaș FlorianCristina crissiОценок пока нет
- Academic Calendar 2015-16-17-1Документ13 страницAcademic Calendar 2015-16-17-1Jeffy ShannonОценок пока нет
- MTNL Power Point Presentation - 3Документ20 страницMTNL Power Point Presentation - 3Varun SachdevaОценок пока нет
- Mcommerce AssignДокумент9 страницMcommerce AssignRose Rhodah Marsh100% (1)
- NodeRED FlowДокумент97 страницNodeRED FlowсергейОценок пока нет
- Electric Motor Voltage: Chapter 1: Fundamentals of Electric DrivesДокумент17 страницElectric Motor Voltage: Chapter 1: Fundamentals of Electric DrivesRAJOLI GIRISAI MADHAVОценок пока нет