Академический Документы
Профессиональный Документы
Культура Документы
Euler
Загружено:
rsgaleanАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Euler
Загружено:
rsgaleanАвторское право:
Доступные форматы
Miscelanea Matematica 45 (2007) 6786
SMM
Euler y la mecnica celeste a
Antonio Garcia
Depto. de Matematicas UAM-Iztapalapa Apdo. Postal 55-534 09340, Mexico D. F. Mxico e agar@xanum.uam.mx
Resumen Se comentan tres trabajos de Euler: [1, 2], que dan las primeras soluciones del problema de tres cuerpos, [3] que contiene un mtodo para aproximar la posicin de un planeta. e o
1.
Introduccin o
Euler escribi ms de sesenta art o a culos y libros de mecnica celeste a sin contar los que tratan sobre mecnica general, ecuaciones diferenciaa les y clculo de variaciones; en sus trabajos aparecen por primera vez las a conguraciones centrales, las soluciones homogrcas y homotticas, las a e coordenadas rotatorias, las ecuaciones de Euler-Lagrange, el problema restringido de tres cuerpos, el problema colineal de tres cuerpos, el movimiento de una part cula atra por dos centros jos y el movimiento da de cuerpos r gidos y de uidos en rotacin. o A diferencia de sus predecesores, Euler ten conanza en los mtoa e dos anal ticos y no utilizaba la geometr sinttica para justicar hechos a e fundamentales de sus demostraciones. Esto le permiti avanzar en proo blemas muy dif ciles y lo lleva a conceptos como son los vectores y sus componentes, los sistemas de referencia y la relacin entre ellos, o el mtodo de Gauss para resolver sistemas de ecuaciones lineales y el e mtodo de variacin de constantes para resolver sistemas de ecuaciones e o 67
68
Antonio Garcia
diferenciales lineales. A veces Euler comet errores, por ejemplo dividir a entre cero, aunque su gran intuicin lo conduc generalmente al resulo a tado correcto. La deteccin y cr o tica de estos errores contribuy a los o estndares actuales de rigor matemtico. a a Vamos a comentar algunas aportaciones tomadas de los textos en lat de Euler con la notacin vectorial moderna preservando sus tcnin o e cas e ideas, abreviando algunos pasos sobre todo al nal de la seccin 3. o El trabajo de Euler en mecnica celeste es continuacin del estudio a o de Johannes Kepler y de Isaac Newton sobre el movimiento planetario. El trabajo del primero se resume en lo que actualmente conocemos como las tres leyes de Kepler: Los planetas se mueven en una elipse, el Sol est en uno de los a focos. El vector posicin de cualquier planeta con respecto al Sol barre o a reas iguales de la elipse en tiempos iguales. Los cuadrados de los periodos de las rbitas de los planetas son o proporcionales a los cubos de los ejes mayores de las elipses. Newton analiz el movimiento de una part o cula, que llamaremos el planeta, atra por otra de gran masa, que llamaremos el Sol y que est loda a calizada en el origen y logra probar que si el movimento del planeta cumple con las leyes de Kepler entonces tambin satisface la ecuacin e o de Kepler: r d2 r (1.1) = 3 , 2 dt |r| donde r(t) es la posicin del planeta en el tiempo t y > 0 es una o constante proporcional a la masa del cuerpo atractor. Observemos por ejemplo que la curva r(t) = [ cos ( t) , sen ( t)] , (1.2)
donde 2 3 = , es una solucin y verica las leyes de Kepler. Juan o Bernoulli, maestro de Euler, da el rec proco del trabajo de Newton dando la solucin general de la ecuacin (1.1) y probando que cumple o o las leyes de Kepler. En la seccin 2 estudiaremos un trabajo de Euler o sobre esta ecuacin. o Newton propuso que n part culas de masas m1 , m2 , . . . , mn y posiciones r1 (t), r2 (t), . . . , rn (t) en el tiempo t satisfacen la ecuacin de o
Euler y la mecanica celeste
69
movimiento d2 rk = dt2 mj (rj rk ) , |rj rk |3 para k = 1, . . . , n. (1.3)
j=k
Esta ecuacin es conocida actualmente como el problema de los n cuero pos. Si n = 2 toma la forma d2 r1 m2 (r2 r1 ) , = 2 dt |r2 r1 |3 d2 r2 m1 (r1 r2 ) . = 2 dt |r1 r2 |3
Si tomamos R = r2 r1 y Q = m1 r1 + m2 r2 , entonces el sistema anterior se transforma en R d2 R = (m1 + m2 ) , dt2 |R|3 d2 Q = 0. dt2
Las soluciones de estas dos ecuaciones son independientes, la primera es una ecuacin de Kepler de la cual Euler conoc la solucin general o a o y la segunda es trivial con solucin Q(t) = e t + f , con e y f vectores o constantes. El paso siguiente es resolver la ecuacin (1.3) para el caso n = 3 y o con estas soluciones explicar el movimiento del Sol, la Tierra y la Luna. Este es el llamado problema de tres cuerpos (PTC), y resisti el ataque o de los antecesores de Euler, quienes no pudieron avanzar en su anlisis. a Euler decidi estudiar casos particulares y modelos simplicados. El o PTC an se sigue explorando con este enfoque. En las secciones 3 y 4 u describiremos trabajos de Euler en esta l nea.
2.
Nova methodus motum planetarum determinandi [3]
Las rbitas de los planetas son descritas por las leyes de Kepler, y o eran conocidas en los tiempos de Euler. En particular, Euler conoc a las excentricidades (medida en que la elipse diere de ser c rculo), los afelios y los perihelios (puntos de la rbita ms lejano y ms cercano al o a a Sol respectivamente) de los planetas conocidos hace trescientos aos. n Sin embargo, dar la posicin exacta de los planetas para un tiempo o dado mediante las leyes de Kepler es complicado, ms an si tomamos a u en cuenta la excentricidad de la rbita terrestre. o Euler propone un nuevo mtodo para dar esta posicin aprovechane o do que la excentricidad de las rbitas de estos planetas es pequea. El o n
70
Antonio Garcia
usa a como parmetro de las rbitas, y empieza su anlisis en = 0, a o a que corresponde a la rbita circular y estudia el caso > 0 mediante o el desarrollo de la serie de potencias de las rbitas en trminos de la o e excentricidad. Para facilitar el desarrollo en serie, previamente simplica las expresiones de las rbitas planetarias mediante varios cambios o de coordenadas. La ecuacin de movimiento de un planeta con el Sol en el origen en o un sistema de coordenadas inerciales x y es la ecuacin de Kepler: o d2 x x , = 2 dt (x2 + y 2 )3/2 d2 y y . = 2 dt (x2 + y 2 )3/2 (2.1)
Despus de algunos cambios de escala podemos suponer que = 1 y e que el radio promedio del planeta es igual a uno. La curva x(t) = cos t, y(t) = sen t, (2.2)
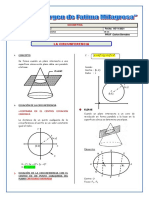
es una parametrizacin del c o rculo de radio uno. En la seccin 1 obo servamos que esta curva es la solucin de la ecuacin de Kepler que o o corresponde a la rbita circular de radio y velocidad angular uniforme o iguales a uno, periodo 2 y excentricidad cero. Euler identica a esta orbita con el movimiento promedio del planeta, propone que las rbitas o de los planetas con excentricidad pequea deben estar cerca de la rbin o ta circular, y trabaja para dar una mejor aproximacin de la posicin o o de un planeta con excentricidad pequea. Siguindolo haremos las sin e guientes hiptesis: o El periodo del planeta es 2, la excentricidad de su rbita es . o En el tiempo t = 0 el planeta se encuentra en su perihelio. Como consecuencia de estas hiptesis y de las propiedades de la elipse o se sigue que la longitud del semieje mayor de la rbita del planeta es o uno, el planeta en el tiempo t = 0 est en el punto (1 , 0), en el a tiempo t = est en (1 , 0) y el sistema es reversible, esto es para a todo tiempo t: x(t) = x(t), y(t) = y(t). Sea X Y el sistema de coordenadas que tiene el mismo origen que el sistema inercial x y, estos dos sistemas en el tiempo t forman entre si el ngulo t mod 2, ver gura 1. Entonces el sistema X Y a est rotando con una velocidad uniforme d = 1. Observemos que en a dt el tiempo t = 0 los dos sistemas coinciden. Si las coordenadas de un punto en el sistema x y son (x, y) y en el sistema X Y son (X, Y ) entonces ambos sistemas estn relacionados a
Euler y la mecanica celeste
71
y X Y q
Figura 1: Coordenadas inerciales y rotativas.
por los sistemas de ecuaciones x = X cos Y sen , X = x cos + y sen , y = X sen + Y cos , Y = x sen + y cos . (2.3)
Observemos que X 2 + Y 2 = x2 + y 2 . Para expresar la ecuacin (2.1) en o las coordenadas X Y derivamos dos veces las ecuaciones anteriores y obtenemos x x y y =X =X =X =X cos Y cos Y sen + Y sen + Y sen X sin Y cos , sen 2X sen 2Y cos X cos + Y sen , cos + X cos Y sin , cos + 2X cos 2Y sin X sen Y cos .
De donde el sistema (2.1) se transforma en X cos Y sen 2X sen 2Y cos X cos + Y sen = X sen + Y cos + 2X cos 2Y sin X sen Y cos = X sen + Y cos (X 2 + Y 2 )3/2 . X cos Y sen (X 2 + Y 2 )3/2 ,
72
Antonio Garcia
Eliminando las funciones cos y sen con las tcnicas habituales se e obtiene X 2Y X = Y + 2X Y = X (X 2 + Y 2 )3/2 Y (X 2 + Y 2 )3/2 , (2.4) .
Notemos que este sistema no depende del ngulo de rotacin , en a o estas coordenadas nuevamente el Sol est en el origen, en el tiempo a t = 0 el planeta est en el punto (1 , 0), en el tiempo t = est en a a (1 , 0), y para todo tiempo t se tiene que X(t) = X(t) y Y (t) = Y (t). Los nuevos trminos que aparecen en (2.4) estn relacionados e a con la velocidad ngular del sistema X Y . a Sustituyendo en la ecuacin (2.3) se sigue que la solucin circular o o en las coordenadas X Y es la solucin constante o X(t) = 1, Y (t) = 0. (2.5)
Como siguiente paso usemos el sistema de coordenadas con origen en la solucin (2.5) mediante la transformacin o o X = q + 1, Y = p, (2.6)
entonces la ecuacin (2.4) se transforma en: o q 2p =1 + q 1+q (p2 + (1 + q)2 )3/2 p p + 2q =p . (p2 + (1 + q)2 )3/2 , (2.7)
Las propiedades de la rbita planetaria y de la posicin del Sol en o o las coordenadas p q se resumen en el siguiente Lema 2.1. En el sistema de coordenadas q p se tienen las siguientes propiedades: 1. La solucin circular en estas coordenadas es q(t) = 0, p(t) = 0. o 2. El Sol se encuentra en el punto (1, 0). 3. El planeta en el tiempo t = 0 satisface q(0) = , p(0) = 0. 4. El sistema es reversible: q(t) = q(t), p(t) = p(t).
Euler y la mecanica celeste
73
Haciendo el desarrollo en serie de potencias en q y p del sistema (2.7) hasta el orden tres 1 y reagrupando trminos obtenemos: e q 2p =3q 3 q 2 + 3 p2 6 p2 q + 4 q 3 + , 2
3 p3 p + 2q =3 p q + 6 p q2 + . 2
(2.8)
Si es la excentricidad de la elipse de la rbita del planeta [q(t), p(t)] o cercana a la solucin constante dada, entonces su desarrollo en serie en o trminos de la excentricidad es: e q = q1 +
2
q2 +
q3 + ,
p = p1 +
p2 +
p3 + .
(2.9)
Donde q, p y los coecientes de sus series dependen del tiempo. Substituyendo estas expansiones en la ecuacin (2.8), agrupando y separando o los trminos con la misma potencia de obtenemos la siguiente sucesin e o de sistemas de ecuaciones diferenciales en las variables q1 , q2 , q3 , . . . , p1 , p2 , p3 , . . . : Trminos de potencia : e q1 2p1 = 3q1 , p1 + 2q1 = 0, Trminos de potencia e
2
q1 (0) = 1, p1 (0) = 0.
(2.10)
: 3p1 2 3q1 2 , 2 q2 (0) = 0, p2 (0) = 0. (2.11)
q2 2p2 = 3q2 + p2 + 2q2 = 3p1 q1 , Trminos de potencia e
3
: q3 (0) = 0, p3 (0) = 0, (2.12) (2.13)
q3 2p3 = 3q3 + 3p1 p2 6p1 2 q1 + 4q1 3 6q1 q2 , 3p1 3 p3 + 2q3 = + 3p2 q1 6p1 q1 2 + 3p1 q2 , 2
y as sucesivamente. En esta familia de sistemas de ecuaciones diferen ciales, el sistema de los trminos de la potencia es independiente del e resto; y el sistema que tiene los trminos de la potencia n depende e slo de los trminos de las potencias , 2 , . . . n1 , lo que fcilmente se o e a demuestra por induccin. Esta familia es reversible, esto es o qk (t) = qk (t),
1
pk (t) = pk (t), para k = 1, 2, 3, . . .
(2.14)
Euler hace los clculos que expondremos en esta seccin hasta la sexta potencia a o sin la ayuda de computadoras y estando completamente ciego.
74
Antonio Garcia
Todos estos sistemas de ecuaciones diferenciales tienen la forma Z 2z = 3Z + M z + 2Z = N (2.15a) (2.15b)
donde M y N son funciones del tiempo t. Euler presenta ahora un estudio amplio, mucho ms de lo que se necesita, de este tipo de sisa temas de ecuaciones diferenciales lineales. El siguiente lema no se usa posteriormente, pero lo incluimos por su inters intr e nseco. Lema 2.2. La solucin general del sistema (2.15) es o Z(t) =2c1 + c2 sin(t) + c3 cos(t)
t t
+
0
M () sen (t ) d + 2
0 t t
N ()
1 cos(t ) cos t
z(t) =c4 + c1 t 2
0
Z() d +
0
(t ) N () d
donde ck , k = 1,. . . 4 son constantes arbitrarias. La solucin general del sistema homogneo asociado o e Z 2z = 3Z, es Z(t) = 2c1 + c2 sin t + c3 cos t, z(t) = c4 3c1 t + 2c2 cos t 2c3 sen t. z + 2Z = 0;
donde ck , k = 1,. . . 4 son constantes arbitrarias. Demostracin: Integrando la ecuacin (2.15b) obtenemos z + 2Z = o o t c1 + 0 N ()d, despejando z obtenemos
t
z = c1 2Z +
0
N () d.
(2.17)
Substituyendo este valor en (2.10) y reagrupando obtenemos
t
Z + Z = 2c1 + M + 2
0
N () d.
(2.18)
que es una ecuacin lineal no homognea. Euler sab que una solucin o e a o de la ecuacin diferencial Z + Z = 0 es u0 cos t y decidi experimeno o tar con soluciones de la ecuacin (2.18) de la forma u(t) cos t, usando o el mtodo que ahora conocemos como variacin de parmetros. Sustie o a tuyendo en la ecuacin (2.18) e integrando obtenemos el valor de u(t) o y sustituyendo nuevamente se obtiene Z(t). El valor de z(t) se obtiene ahora a partir de (2.17) integrando una vez. El sistema homogneo es e (2.15) cuando M (t) = N (t) = 0.
Euler y la mecanica celeste
75
De la linealidad del sistema de ecuaciones diferenciales (2.15) se sigue que su solucin general se forma con la suma de la solucin general o o de su sistema homogneo asociado y de una solucin particular del e o sistema (2.15). Para obtener la solucin particular se usar que la suma o a de soluciones de los siguientes dos sistemas Z 2z = 3Z + M1 , z + 2Z = N1 , es solucin del sistema o Z 2z = 3Z + M1 + M2 , z + 2Z = N1 + N2 . El siguiente lema da soluciones particulares de algunos de estos sistemas. Lema 2.3. 1. La ecuacin diferencial o Z 2z = 3Z + c, z + 2Z = 0. tiene la siguiente solucin particular o c z(t) = t, 2 2. Dada la ecuacin diferencial o Z 2z = 3Z + C cos (nt) , z + 2Z = c sen (nt) . si n = 0, 1, tiene la siguiente solucin particular o c (3 + n2 ) 2Cn sen (nt) , n2 (1 n2 ) 2c Cn Z(t) = cos (nt) . n (n2 1) z(t) = Si n = 1 tiene la siguiente solucin particular o z(t) = (C 2c) t cos t + 4c Z(t) = C c t sen t + 2 3C sen t, 2 C 3c cos t 4 2 Z(t) = 0. Z 2z = 3Z + M2 , z + 2Z = N2 ,
76
Antonio Garcia
3. La ecuacin diferencial o Z 2z = 3Z + C1 cos (n1 t) + C2 cos (n2 t) + , z + 2Z = c1 sen (n1 t) + c2 sen (n2 t) + . tiene la siguiente solucin particular o c1 (3 + n2 ) 2C1 n1 1 sen (n1 t) n2 (1 n2 ) 1 1 c2 (3 + n2 ) 2C2 n2 2 + sen (n2 t) + , n2 (1 n2 ) 2 2 2c1 C1 n1 2c2 C2 n2 Z(t) = cos (n1 t + 1 ) + cos (n2 t + 2 ) + . 2 n1 (n1 1) n2 (n2 1) 2 z(t) = Demostracin: La primera parte del lema se obtiene evaluando direco tamente. Para la parte (2) con n = 0, 1 Euler propone soluciones de la forma Z(t) = F cos(nt) y z(t) = f sen(nt) en donde f y F son constantes cuyos valores se obtienen sustituyendo en la ecuacin diferencial. o En el caso n = 1 se proponen soluciones de la forma Z(t) = At sen t + B cos t, z(t) = D t cos t + E sen t. La ultima parte es consecuencia directa de las anteriores. Con el anlisis previo regresemos al problema de aproximar la posia cin del planeta. Euler estudia las soluciones de las ecuaciones asociadas o a los trminos de las potencias de . El principal problema que enfrentae mos en cada paso es elegir adecuadamente las constantes que aparecen. Sistema de ecuaciones de la potencia : El sistema de ecuaciones diferenciales (2.10) tiene la forma del sistema (2.15) con M = N = 0, entonces por el lema 2.2 su solucin general es o q1 (t) = 2c1 + c2 sen t + c3 cos t, p1 (t) = c4 3c1 t + 2c2 cos t 2c3 sen t. (2.25)
Si c1 = 0 entonces p1 (t) y por lo tanto p(t) no son acotados. Como estamos interesados en soluciones [q(t), p(t)] acotadas debemos tener c1 = 0. Observemos que 1 = q1 (0) = c3 , Sustituyendo en (2.25) obtenemos q1 (0) = c2 sen t cos t p1 (0) = 2c2 + 2c2 cos t + 2 sen t. 0 = p1 (0) = c4 + 2c2 .
Euler y la mecanica celeste
77
Para obtener el valor de c2 usamos la reversibilidad del sistema. Dado que p1 (t) = p1 (t) entonces 2c2 + 2c2 cos t 2 sen t = 2c2 2c2 cos t 2 sen t, de donde se sigue que c2 = 0, obteniendose q1 (t) = cos t, p1 (t) = 2 sen t. (2.26)
La rbita del planeta hasta el primer orden de la excentricidad es o q(t) = q1 (t) = cos t, p(t) = p1 (t) = 2 sen t. O bien en coordenadas inerciales se tiene que: x(t) = (1 cos t) cos t 2 sen2 t, y(t) = (1 cos t) sen t + 2 sen t cos t. Sistema de ecuaciones de potencia 2 : Usando las expresiones de p1 (t) y q1 (t) dadas en (2.26) el sistema (2.11) se transforma en dp2 3 9 d2 q2 2 =3q2 + cos (2 t) , 2 dt dt 2 2 d2 p2 dq2 +2 = 3 sen (2t) , dt2 dt Los lemas 2.2 y 2.3 implican que La solucin general del sistema homogneo q2 2p2 = 3q2 , p2 + o e 2q2 = 0 es p2 (t) = (c4 + 2c2 ) 3c1 t + 2c2 cos t 2c3 sen t, q2 (t) = 2c1 + c2 sen t + c3 cos t.
3 Una solucin particular de q2 2p2 = 3q2 + 2 , p2 + 2q2 = 0 es o 3 p2 (t) = 3t, q2 (t) = 2 .
q2 (0) = 0, p2 (0) = 0.
(2.27)
Una solucin particular de q2 2p2 = 3q2 9 cos (2 t), p2 + 2q2 = o 2 1 3 sen (2t) es p2 (t) = 1 sen (2t) y q2 (t) = 2 cos (2t). 4 Entonces la solucin general del sistema de ecuaciones diferenciales o (2.27) est dada por a p2 (t) = (c4 + 2c2 ) 3 (c1 + 1) t + 2c2 cos t 2c3 sen t + q2 (t) = 3 1 + 2c1 + c2 sen t + c3 cos t + cos (2t) . 2 2 1 sen (2t) , 4
78
Antonio Garcia
Nuevamente, debido a que las soluciones buscadas son acotadas, se necesita que c1 = 1. Usando las condiciones iniciales y la ecuacin o (2.14) como en el caso anterior obtenemos que los coecientes c2 , c3 y c4 deben ser cero. En consecuencia se obtiene: p2 (t) = 1 sen (2t) , 4 1 1 q2 (t) = + cos (2t) . 2 2 (2.28)
La aproximacin de la solucin hasta los trminos cuadrados es o o e
2 2
q(t) = cos t +
(cos (2t) 1) ,
p(t) = 2 sen t +
sen (2t) .
Sistema de ecuaciones de potencia 3 : Sustituyendo en la ecuacin o (2.12) los valores obtenidos previamente para q1 (t), p1 (t), q2 (t), p2 (t) y simplicando se obtiene el sistema de ecuaciones: q3 2p3 = 3q3 + 9 25 cos t cos (3t) , 4 4 9 39 sen (3t) . p3 + 2q3 = sen t 8 8
Con el mtodo desarrollado anteriormente se tiene que su solucin e o general es q3 (t) =2c1 + c2 sen t + c3 p3 (t) =c4 3c1 t + 2c2 cos t + 9 8 cos t + 9 2c3 8 3 cos (3t) , 8 7 sen t + sen (3t) . 24
De las condiciones iniciales, la ecuacin (2.14) y la acotacin de las o o 3 soluciones buscadas se sigue que c1 = 0, c2 = 0, c3 = 4 , c4 = 0. De donde 3 3 cos t + cos (3t) , 8 8 3 7 p3 (t) = sen t + sen (3t) . 8 24 q3 (t) = La aproximacin de la solucin hasta los trminos cbicos es o o e u 33 e2 (cos (3t) cos t) , q(t) = cos t + (cos (2t) 1) + 2 8
2 3
p(t) = 2 sen t +
sen (2t) +
24
(7 sen (3t) 9 sen t) .
Euler y la mecanica celeste
79
En trminos de las coordenadas originales e x(t) = cos t + y(t) = sen t + 2 (cos (2t) 3) +
2 3 32 (cos (3t) cos t) + (cos (4t) cos (2t)) , 8 3 3
(4 sen (4t) 5 sen (2t)) . 2 8 12 La excentricidad de Marte es 0,093. En la gura 2 se muestran la sen (2t) +
(3 sen (3t) 5 sen t) +
0.8
Orbita circular
0.6
Aproximacin de Euler
0.4
0.2 0.25 0.5 0.75 1
-0.75 -0.5-0.25
Figura 2: Aproximacin circular y de Euler de la rbita de Marte en o o coordenadas inerciales. aproximacin circular y de Euler de la rbita de este planeta. o o El mtodo descrito en esta seccin para ubicar a un planeta necesita e o el periodo, el afelio y que la excentricidad de la rbita del planeta sea o casi cero. Despus de Euler se han propuesto varias mejoras y otros e mtodos para resolver este problema. Mencionaremos tan solo a Lae grange, alumno de Euler, quien estudi el caso en que la excentricidad o es grande y la aplic a la localizacin de cometas, y a Gauss quien, o o estudi el caso en que se ten pocos datos y lo us para localizar a o an o Ceres, planeta enano entre Marte y Jupiter, con slo tres observaciones. o
3.
De Motu rectilineo Trium corporum se mutuo attrahentium [2].
Entre Newton y Euler se avanz poco en el PTC. En esta seccin o o y la prxima construiremos las dos primeras soluciones conocidas del o PTC, y que fueron obtenidas por Euler.
80
Antonio Garcia
Daremos la solucin del PTC donde las tres part o culas se mueven en una recta y adems conservan la proporcin en las distancias entre a o ellas, por lo que la forma de su conguracin no cambia. Las part o culas tienen masas m1 = a, m2 = b y m3 = c y posiciones r1 = x, r2 = y, r3 = z.
Donde x < y < z, ver la gura 3, entonces la ecuacin (1.3) toma la o forma c b d2 x , = 2 + 2 dt (y x) (z x)2 d2 y a c = , 2 + 2 dt (y x) (z y)2 a b d2 z = . 2 2 dt (z x) (z y)2 (3.1a) (3.1b) (3.1c)
A continuacin buscaremos las cantidades que son constantes a lo o
Figura 3: Problema colineal de tres cuerpos.
largo de las trayectorias. A estas cantidades se les llama integrales de la ecuacin diferencial, integrales de movimiento o integrales primeras. o Sumando el resultado de multiplicar la ecuacin (3.1a) por a, (3.1b) o por b y (3.1c) por c obtenemos d2 x d2 y d2 z d2 (ax + by + cz) = a 2 + b 2 + c 2 = 0, dt2 dt dt dt de donde se sigue que ax + by + cz = et + f, (3.2)
para algunas constantes e y f . La funcin et + f es el centro de masas, o y e es el momentum del sistema. La ecuacin (3.2) se llama la integral o de momento.
Euler y la mecanica celeste
81
Sea h=a dx dt
2
+b
dy dt
+c
dz dt
2ab 2ac 2bc + + , (3.3) xy xz yz
la cantidad h se llama la energ del sistema. Derivando se sigue que a dh = 0. De esta forma obtenemos que e, f y h son tres integrales. dt Euler pensaba que resolver un sistema de ecuaciones diferenciales era transformarlo en un sistema equivalente de ecuaciones algebraicas de las posiciones y sus velocidades, eliminado las derivadas de las velocidades. Notemos que Euler inclu entre las funciones algebraicas incluye a funa x ciones como e , tan x, etc. Las ecuaciones (3.2) y (3.3) formar parte an de este sistema, pero faltan ms ecuaciones para resolver el sistema de a ecuaciones diferenciales (3.1). Ahora sabemos que el problema colineal de tres cuerpos es catico, lo que implica entre otras cosas que no existe o el nmero necesario de integrales para resolver el sistema en el sentido u de Euler, ver [4]. Tambin sabemos que ciertas soluciones particulares e como las que encontraremos en esta seccin y las integrales contienen la o informacin fundamental sobre la estructura de las soluciones, ver [5]. o Denamos las funciones p = y x, q = z y, (3.4)
las cuales son positivas, ver gura 3. El siguiente paso es transformar el sistema (3.1) y la ecuacin de momento y la energ a estas nuevas o a variables. Observemos primero que b c d2 x , = 2+ dt2 p (q + p)2 d2 y a c = 2 + 2, 2 dt p q 2 a b dz = 2 2. 2 dt q (q + p) Sustituyendo (3.4) en la denicin de p, q y en la integral de momento, o y despejando y en esta ultima obtenemos: d2 p d2 y d2 x a c b c = 2 2 = 2 + 2 + dt2 dt dt p q p2 (q + p)2 a+b c c = 2 + 2 , p q (q + p)2 d2 q d2 z d2 y a a c b = 2 2 = 2 2 2 + 2 2 dt dt dt q p q (q + p) a a b+c = . 2 + 2 p q2 (q + p) (3.5a)
(3.5b)
82 Adems a
Antonio Garcia
ap cq + et + f . a+b+c La ecuacin de la energ toma ahora la forma: o a y= bc (q )2 + ab (p )2 + ac (p + q )2 2ab 2ac 2bc = h + + + , a+b+c p p+q q
2
(3.6)
(3.7)
e donde h = h a+b+c . Una vez obtenida y se puede usar (3.4) para encontrar x y z. Por lo que ahora se buscan p y q en el sistema (3.5) con la restriccin (3.7). Notemos que ahora tenemos un sistema de dos o ecuaciones diferenciales, ya que se elimin una ecuacin diferencial por o o medio de la integral de momento. El sistema de ecuaciones involucra a las variables p, q, t. Euler busc primero las soluciones que preservan o la forma, con esto en mente deni el siguiente cambio de variables: o
q = up, la variable u est asociada a la forma que tienen las posiciones de las a part culas y p a su tamao. n A continuacin haremos una simplicacin sobre el trabajo original o o de Euler. Como estamos interesados en las soluciones que preservan la forma supongamos que u es constante y por lo tanto u = 0. El sistema (3.5) se escribe como: p = f (u) , p2 f (u) = a + b c c + ; 2 u (u + 1)2 b+c a g(u) = a + . 2 + u2 (u + 1)
g(u) q = up = 2 , p
(3.8)
Como q = up, es suciente encontrar una solucin a la primera ecuacin. o o Dividimos la ecuacin en dos problemas, un problema algebraico y un o problema de Kepler en una recta. Veamos primero el problema algebraico. De q = up y de (3.8) se sigue u a b + c c 2 u (u + 1)2 =a a b+c , 2 u2 (u + 1) (3.9)
multiplicando por u2 (u + 1)2 y reagrupando obtenemos:
(b+c)+(2b+2c)u+(b+3c)u2 (3a+b)u3 (3a+2b)u4 (a+b)u5 = 0. (3.10)
Euler y la mecanica celeste
83
Hay un solo cambio de signo en este polinomio por lo que la regla de los signos de Descartes implica que hay solamente una ra positiva, la z cual denotamos por u0 . Con esto se termina el problema algebraico. Estudiemos ahora el problema de Kepler en una dimensin, tomando o u = u0 en la ecuacin (3.8) se obtiene la ecuacin o o p = f (u0 ) , p2 (3.11)
es posible demostrar que f (u0 ) > 0, por lo que esta ecuacin es una o ecuacin de Kepler en una dimensin. o o La ecuacin de la energ toma la forma o a 1 (u) p (u) = h . p
2ac Donde (u) = ab+bc u +ac(1+u) > 0 y (u) = 2ab + 1+u + 2bc > 0. a+b+c u Esta ecuacin es una ecuacin diferencial de variables separables, cuya o o solucin despus de resolverla se escribe como se obtiene o e
2 2
(u0 )
log(g p + (u0 )) (u0 ) p h g2
= t + c.
(3.12)
Si p(t) es solucin de (3.12), entonces tambin lo es de la ecuacin o e o diferencial (3.11), esta funcin y q(t) = u0 p(t) forman una solucin de o o (3.8), sustituyendo estos valores en (3.6) y (3.4) se obtiene nalmente una solucin del sistema (3.1). o La posicin de las part o culas en un tiempo dado t en una solucin se o llama la conguracin de la solucin en el tiempo t. Las soluciones tales o o que todas sus conguraciones son semejantes entre si se llaman homogrcas y a su conguracin, conguracin central (CC). La solucin a o o o que acabamos de construir es la primera solucin homogrca conocida. o a Notemos que Euler obtiene en (3.10) un polinomio de una variable de orden cinco, por lo que se conforma con probar la existencia de u0 . Este mtodo no sirve en el problema de cuatro cuerpos ya que el polinomio e resultante tiene dos variables.
4.
Considerationes de motu corporum coelestium [1]
Euler observa que con un proceso similar al de la seccin anterior o se pueden obtener soluciones en el plano tales que las tres part culas
84
Antonio Garcia
estn siempre alineadas pero girando en torno a su centro de masas, a ver gura 4. Muchos detalles sern omitidos. a Sea (r1 , r2 , r3 ) una solucin de la ecuacin (1.3) para n = 3. Se puede o o suponer que el origen est en el centro de masas: a r1 + b r2 + c r3 = 0 a y se denen las funciones p = r2 r1 , u p = q = r3 r2 , (4.1)
donde u es una constante que se determinar nuevamente. a
c b
Figura 4: Equilibrio relativo colineal a = 1, b = 0,4, c = 0,7. Entonces se obtiene el siguiente sistema de ecuaciones diferenciales: p = f (u) p , |p|3 q = u p = g(u) p . |p|3 (4.2)
Donde las funciones f (u) y g(u) fueron denidas en (3.8). Nuevamente el problema es dividido en dos partes, el problema algebraico, que coincide con el caso anterior obtenindose el mismo valor de u = u0 y un e problema de Kepler en el plano, cuya solucin general fue obtenida por o Juan Bernoulli y era conocida por Euler. Por ejemplo, una solucin es o p = ( cos [t] , sen [t]) , donde 2 3 = f (u0 ), q = u0 p.
Euler y la mecanica celeste
85
En trminos de las posiciones de las part e culas obtenemos: b + c + c u0 ( cos [t] , sen [t]) , a+b+c a cu0 r2 = ( cos [t] , sen [t]) , a+b+c a + a u0 + b u0 ( cos [t] , sen [t]) . r3 = a+b+c r1 = Estas soluciones en las coordenadas rotativas de la seccin 2 se cono vierten en puntos jos, por lo que actualmente se llaman equilibrios relativos, notemos que estas soluciones tambin son homogrcas. e a El estudio de las CC es un tema de gran inters actualmente. Las e referencias [5, 6, 7, 8] son introducciones a la mecnica celeste en donde a se pueden apreciar la importancia de las CC y encontrar otras aportaciones de Euler a esta rama de las matemticas. a
Referencias
[1] L. Euler, Considerationes de motu corporum coelestium Novi Commentarii academiae scientiarum Petropolitanae 10, (1766), 544 558. [2] L. Euler, De motu rectilineo trium corporum se mutuo attrahentium, Novi Commentarii academiae scientiarum Petropolitanae 11, (1767), 144151. [3] L. Euler, Nova methodus motum planetarum determinandi, Acta Academiae Scientarum Imperialis Petropolitinae (1778), 277-302. [4] J. Llibre, C. Simo, Some homoclinic phenomena in the three-body problem, J. Dierential Equations 37 (1980), no. 3, 444465. [5] K. R. Meyer, G. R. Hall, Introduction to Hamiltonian Dynamical Systems and the N-Body Problem. Springer-Verlag, 1992. [6] R. Moeckel, Celestial Mechanics (especially central congurations), International Atomic Energy Agency, 1994. [7] D. G. Saari, On the role and properties of n body central congurations, Celestial Mechanics and Dynamical Astronomy 21 (1980), no 1, 9-20.
86
Antonio Garcia
[8] D. G. Saari, Collisions, Rings, and Other Newtonian N -Body Problems. CBMS 104, American Mathematical Society, 2005.
Вам также может понравиться
- Calculo de ErroresДокумент59 страницCalculo de ErroresGian Lucas Abad MontenegroОценок пока нет
- GrafosДокумент18 страницGrafosrsgalean50% (2)
- Rogan J., Muñoz V. - Introducción A La Física Matemática (2ed)Документ435 страницRogan J., Muñoz V. - Introducción A La Física Matemática (2ed)rsgaleanОценок пока нет
- HistoriaДокумент90 страницHistoriaroddo456Оценок пока нет
- MuestreoДокумент12 страницMuestreorsgalean100% (1)
- Introduccion A La Astronomia EsfericaДокумент59 страницIntroduccion A La Astronomia EsfericarsgaleanОценок пока нет
- Curso de Mecánica Celeste: Rafael Cid PalaciosДокумент66 страницCurso de Mecánica Celeste: Rafael Cid PalaciosLeo NoirОценок пока нет
- PowerPoint - Grados de Libertad y LigadurasДокумент30 страницPowerPoint - Grados de Libertad y Ligadurasrsgalean100% (2)
- Curso Energia SolarДокумент158 страницCurso Energia SolarrsgaleanОценок пока нет
- Practica Calificada II Mark EspinozaДокумент5 страницPractica Calificada II Mark EspinozaVictorESGOОценок пока нет
- Raymer AlaДокумент27 страницRaymer Alafervero11Оценок пока нет
- PreguntasДокумент12 страницPreguntasMILAGROSОценок пока нет
- Síntesis Parábola y La ElipseДокумент8 страницSíntesis Parábola y La ElipseCHALIA ALTAGRACIA MATEO DEL ROSARIOОценок пока нет
- 5to Conicas 4BДокумент7 страниц5to Conicas 4BANTONY BERTELLO OJEDAОценок пока нет
- Math 1005 222 2 T2Документ5 страницMath 1005 222 2 T2Daniel YoveraОценок пока нет
- 8 Folds - En.esДокумент27 страниц8 Folds - En.esRai Ronaldo Ttito ToribioОценок пока нет
- Elipse UNAMДокумент18 страницElipse UNAMJoelAnguianoОценок пока нет
- Arcos y Bovedas PDFДокумент11 страницArcos y Bovedas PDFIver Ortiz RiveraОценок пока нет
- FruteraДокумент10 страницFruteradarlinuxОценок пока нет
- 3er Sem. - Matemáticas, Células y Moléculas - U1 Con PortadaДокумент21 страница3er Sem. - Matemáticas, Células y Moléculas - U1 Con Portadaalumno copalОценок пока нет
- Temario Examen de Selección Tec. Médica, Farmacia y NutriciónДокумент7 страницTemario Examen de Selección Tec. Médica, Farmacia y NutricióndayanОценок пока нет
- Matematica Quinto 2023 PDFДокумент79 страницMatematica Quinto 2023 PDFdiego velezОценок пока нет
- Superficies CónicasДокумент13 страницSuperficies CónicasGerson LópezОценок пока нет
- Guia de Aprendizaje - AlgebraДокумент11 страницGuia de Aprendizaje - AlgebraIsa OОценок пока нет
- STRAINДокумент77 страницSTRAINManuel Herrera PeñaОценок пока нет
- Material Nbgdf4zyДокумент11 страницMaterial Nbgdf4zytearyur kwonОценок пока нет
- Criterios para Identificar A La Cónica Que Representa Una Ecuación de Segundo GradoДокумент3 страницыCriterios para Identificar A La Cónica Que Representa Una Ecuación de Segundo GradoReymi ThenОценок пока нет
- Tipos de Tapas de RecipientesДокумент3 страницыTipos de Tapas de RecipientesSergioAndRodBalОценок пока нет
- Dibujo 1Документ38 страницDibujo 1Julio Garcia100% (1)
- Sistema Estructurales de Superficie ActivaДокумент65 страницSistema Estructurales de Superficie Activaestephany mОценок пока нет
- Taller Formas CónicasДокумент2 страницыTaller Formas CónicasSolis HinestrozaОценок пока нет
- Construcción de PolígonosДокумент5 страницConstrucción de PolígonosmarcelОценок пока нет
- Presentación1 ElipsisДокумент4 страницыPresentación1 ElipsisELIANA ANGHELINA CASTILLO ZAPATAОценок пока нет
- Act55 - Aprendiendo A Obtener ElipsesДокумент13 страницAct55 - Aprendiendo A Obtener ElipsesLucely PachecoОценок пока нет
- Elipse TeoriaДокумент15 страницElipse TeoriaPercy Torres Avalos KeplerОценок пока нет
- Representacion Algebraica y Grafica de RelacionesДокумент53 страницыRepresentacion Algebraica y Grafica de RelacionesNayeli Olguin GonzálezОценок пока нет
- La ElipseДокумент10 страницLa ElipseIanBenitesОценок пока нет
- Tarea 12 6Документ8 страницTarea 12 6katherin Roldan50% (2)
- La Elipse - Elementos y EcuacionesДокумент19 страницLa Elipse - Elementos y EcuacionesY̶o̶s̶e̶l̶y̶n̶ ̶o̶c̶Оценок пока нет