Вам также может понравиться
- Ejercicios Básicos para MicroconladoresДокумент8 страницEjercicios Básicos para MicroconladoresestanizniloОценок пока нет
- Sensor de ToqueДокумент3 страницыSensor de ToqueOptimusTronic100% (3)
- Análisis de Un Teclado MatricialДокумент4 страницыAnálisis de Un Teclado MatricialMario M̶a̶r̶t̶í̶n̶e̶z̶ G̶a̶r̶c̶í̶a̶Оценок пока нет
- PIC 18 Simulator IDEДокумент44 страницыPIC 18 Simulator IDEfhidalgo_8Оценок пока нет
- El Módulo Adc de Los Avr PDFДокумент27 страницEl Módulo Adc de Los Avr PDFmi_papiОценок пока нет
- Modulo Adc Atmega8Документ20 страницModulo Adc Atmega8Jean MelendezОценок пока нет
- Conecta un teclado matricial a un PIC usando 8 pinesДокумент4 страницыConecta un teclado matricial a un PIC usando 8 pinesNestor GuillenОценок пока нет
- Capitulo5. Sentencias de Control Programación Del ATmega32 (Español)Документ5 страницCapitulo5. Sentencias de Control Programación Del ATmega32 (Español)Fortino100% (4)
- Reloj DigitalДокумент25 страницReloj DigitalEdgar Segales VillcaОценок пока нет
- Mini cursillo PIC Simulator IDEДокумент19 страницMini cursillo PIC Simulator IDEDaniel GarciaОценок пока нет
- Codigo Teclado MatricialДокумент5 страницCodigo Teclado MatricialAndres MolinaОценок пока нет
- Control de Velocidad de Un Motor MonofásicoДокумент21 страницаControl de Velocidad de Un Motor MonofásicoDiana Selene67% (6)
- Lab 4 ADCДокумент6 страницLab 4 ADCManolo Camilo Ortega CondegaОценок пока нет
- Uso Timer1 Como Un ContadorДокумент5 страницUso Timer1 Como Un ContadorRUBENОценок пока нет
- P2 MicroДокумент14 страницP2 MicroSergio Antonio Gallegos AlvaradoОценок пока нет
- Cerradura Electronica CodificadaДокумент86 страницCerradura Electronica CodificadaEdwin Hernandez100% (1)
- Circui 5Документ10 страницCircui 5api-3765704100% (2)
- Curso Intensivo de Programación de Microcontroladores NIPLEДокумент5 страницCurso Intensivo de Programación de Microcontroladores NIPLEchemist_17_18Оценок пока нет
- Manejo de Memoria SD - MMC Con PIC 16F87XXДокумент5 страницManejo de Memoria SD - MMC Con PIC 16F87XXMario Perez-JordanОценок пока нет
- Temporizador 22 Pic 16f877aДокумент2 страницыTemporizador 22 Pic 16f877ajimmylomanoОценок пока нет
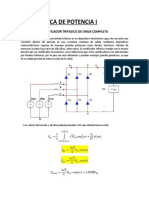
- Rectificador Trifasico de Onda CompletaДокумент6 страницRectificador Trifasico de Onda Completajulfo05Оценок пока нет
- Programador Universal Microchip Picstart PlusДокумент51 страницаProgramador Universal Microchip Picstart PlusJuan ZarateОценок пока нет
- Manejo de Matriz de LedДокумент7 страницManejo de Matriz de LedmarcosolveraОценок пока нет
- Tutorial Verilog BloqueДокумент42 страницыTutorial Verilog BloqueterrysconОценок пока нет
- Curso Codevision AVRДокумент90 страницCurso Codevision AVRKevin FrancoОценок пока нет
- Manual Pic SimulatorДокумент59 страницManual Pic Simulatorjaniro74Оценок пока нет
- PIC16F887Документ127 страницPIC16F887Ernesto ArzabalaОценок пока нет
- Ensamblador 8086/88 instrucciones registrosДокумент20 страницEnsamblador 8086/88 instrucciones registrosErick Alex DíazОценок пока нет
- Laboratorio - MemoriasДокумент6 страницLaboratorio - MemoriasManolo Camilo Ortega CondegaОценок пока нет
- SonografiaДокумент38 страницSonografiahugo_rgz92Оценок пока нет
- Diseño de Contadores en CascadaДокумент6 страницDiseño de Contadores en CascadaPrograma Ingeniería de Sistemas100% (4)
- Capitulo6. Timer0 Del AVR Del ATmega32 (Español)Документ13 страницCapitulo6. Timer0 Del AVR Del ATmega32 (Español)Fortino100% (3)
- Apuntes para Calcular Diodo Zener Electrónica IДокумент1 страницаApuntes para Calcular Diodo Zener Electrónica IJuan Pablo Gómez100% (1)
- Los Formatos de Datos ENDIANNESSДокумент2 страницыLos Formatos de Datos ENDIANNESSErik SoonОценок пока нет
- Historia de La Computadora Clase LogaritmosДокумент11 страницHistoria de La Computadora Clase LogaritmosAntonio Castillo NevarakОценок пока нет
- Probador de MOSFETДокумент3 страницыProbador de MOSFETMario MilskiОценок пока нет
- Comunicación RS232Документ29 страницComunicación RS232Carlos Niño Mendoza100% (1)
- Aplicaciones avanzadas con C18 (I): Comunicación USB HIDДокумент17 страницAplicaciones avanzadas con C18 (I): Comunicación USB HIDEstefania AmundarayОценок пока нет
- Introducción de PCB multicapa en ColombiaДокумент4 страницыIntroducción de PCB multicapa en ColombiacarlcoxОценок пока нет
- La Arquitectura Harvard y Sus VentajasДокумент3 страницыLa Arquitectura Harvard y Sus VentajasCesar Daniel Herrero ToruñoОценок пока нет
- Tutorial WarpДокумент8 страницTutorial WarpMario Merino MárquezОценок пока нет
- Microcontroladores PIC18F4550.Документ15 страницMicrocontroladores PIC18F4550.Gabriel Acevedo lopezОценок пока нет
- Resolviendo Sistemas de Ecuaciones Lineales Por Medio de GráficasДокумент6 страницResolviendo Sistemas de Ecuaciones Lineales Por Medio de GráficasCarlos Augusto Sabino CañizaresОценок пока нет
- l09 Puerto SerialДокумент8 страницl09 Puerto SerialJavier ParedesОценок пока нет
- PDF Control de Velocidad de Un Motor DC Con Pic - CompressДокумент15 страницPDF Control de Velocidad de Un Motor DC Con Pic - CompressJonathan Jimenez JardonОценок пока нет
- PDF Control de Velocidad de Un Motor DC Con Pic - CompressДокумент15 страницPDF Control de Velocidad de Un Motor DC Con Pic - CompressJonathan Jimenez JardonОценок пока нет
- Estoy Creando Un Programa en C para Recibir La Temperatura de Un Sensor DS18B20Документ24 страницыEstoy Creando Un Programa en C para Recibir La Temperatura de Un Sensor DS18B20Leonardo GrafiaОценок пока нет
- Programación de microcontroladores ATmega con división binariaДокумент4 страницыProgramación de microcontroladores ATmega con división binariaAngelogc2014Оценок пока нет
- Practica 7Документ4 страницыPractica 7John Frank Belmar100% (1)
- Adquisicion y Transmisión de Datos A Una Planilla Excel 2020Документ22 страницыAdquisicion y Transmisión de Datos A Una Planilla Excel 2020Rafael MendozaОценок пока нет
- Paper1 - Manejo Del ADCON2Документ5 страницPaper1 - Manejo Del ADCON2Juan Camilo QuicenoОценок пока нет
- Choper de FrenadoДокумент32 страницыChoper de FrenadoRomulo TorresОценок пока нет
- Laboratorio 9 Modulo ADC y PWM Con El PIC 16F877AДокумент9 страницLaboratorio 9 Modulo ADC y PWM Con El PIC 16F877AacajahuaringaОценок пока нет
- Atsam4s AdcДокумент6 страницAtsam4s AdcBlack SwanОценок пока нет
- Clase AdcДокумент2 страницыClase AdcPerla MVОценок пока нет
- Medidor de VoltajeДокумент15 страницMedidor de VoltajeDAVID ALEJANDRO BURBANO USBANOОценок пока нет
- UNI-COMAHUE Lab Digitales IIДокумент11 страницUNI-COMAHUE Lab Digitales IIMariano Ezequiel ChicatunОценок пока нет
- Labview y PicДокумент0 страницLabview y Picgjimenezt077292Оценок пока нет
- Medición ADC LPC13xxДокумент5 страницMedición ADC LPC13xxyenhy angelОценок пока нет
- Electronic A DigitalДокумент40 страницElectronic A DigitalMiguel ColqueОценок пока нет
- Rectificador Trifasico de Onda CompletaДокумент6 страницRectificador Trifasico de Onda Completajulfo05Оценок пока нет
- Guia 01 IndexadoДокумент28 страницGuia 01 Indexadojulfo05Оценок пока нет
- 2.4 Programación CNC - Movimientos de HerramientaДокумент9 страниц2.4 Programación CNC - Movimientos de Herramientajulfo05Оценок пока нет
- 1.1 Programacion CNC - IntroduccionДокумент14 страниц1.1 Programacion CNC - Introduccionjulfo05Оценок пока нет
- Robot industrial: control E/SДокумент3 страницыRobot industrial: control E/Sjulfo05Оценок пока нет
- Guia Cad ElectronicoДокумент8 страницGuia Cad Electronicojulfo05Оценок пока нет
- Practica #5 v.1 Cosimir - RoboticaДокумент4 страницыPractica #5 v.1 Cosimir - Roboticajulfo05Оценок пока нет
- 1.2 Programacion CNC - Elementos de Un CNCДокумент10 страниц1.2 Programacion CNC - Elementos de Un CNCjulfo05Оценок пока нет
- Practica Calificada #1 CosimirДокумент2 страницыPractica Calificada #1 Cosimirjulfo05Оценок пока нет
- 3.1 Programacion CNC - Puntos de ReferenciaДокумент3 страницы3.1 Programacion CNC - Puntos de Referenciajulfo05Оценок пока нет
- Practica #3 CosimirДокумент5 страницPractica #3 Cosimirjulfo05Оценок пока нет
- 1.2 Programacion CNC - Elementos de Un CNCДокумент10 страниц1.2 Programacion CNC - Elementos de Un CNCjulfo05Оценок пока нет
- 1.2 Programacion CNC - Elementos de Un CNCДокумент10 страниц1.2 Programacion CNC - Elementos de Un CNCjulfo05Оценок пока нет
- 3.1 Programacion CNC - Puntos de ReferenciaДокумент3 страницы3.1 Programacion CNC - Puntos de Referenciajulfo05Оценок пока нет
- 2.3 Programacion CNC - Elementos de Un ProgramaДокумент6 страниц2.3 Programacion CNC - Elementos de Un Programajulfo05Оценок пока нет
- Practica Calificada #1 CosimirДокумент2 страницыPractica Calificada #1 Cosimirjulfo05Оценок пока нет
- Practica #3 CosimirДокумент5 страницPractica #3 Cosimirjulfo05Оценок пока нет
- 6.1 Programacion CNC - Translado de OrigenДокумент5 страниц6.1 Programacion CNC - Translado de Origenjulfo05Оценок пока нет
- Control Numérico Interpolación Angulo CotaДокумент2 страницыControl Numérico Interpolación Angulo Cotajulfo05Оценок пока нет
- 4.4 Programación CNC - TemporizaciónДокумент2 страницы4.4 Programación CNC - Temporizaciónjulfo05Оценок пока нет
- Informe de Laboratorio Numero 2Документ32 страницыInforme de Laboratorio Numero 2Luis Alberto Zapata OjedaОценок пока нет
- Tutorial de Transformaciones Matriciales y Marices de RotacionДокумент21 страницаTutorial de Transformaciones Matriciales y Marices de Rotacionjulfo05Оценок пока нет
- Practica de Control de ProcesosДокумент6 страницPractica de Control de Procesosjulfo05Оценок пока нет
- Practica #5 v.1 Cosimir - RoboticaДокумент4 страницыPractica #5 v.1 Cosimir - Roboticajulfo05Оценок пока нет
- Reparación de Tarjeta de Lavadora SamsungДокумент34 страницыReparación de Tarjeta de Lavadora Samsungjulfo0575% (4)
- Robotica - Tarea Entradas SalidasДокумент4 страницыRobotica - Tarea Entradas Salidasjulfo05Оценок пока нет
- Reparación de Tarjeta de Lavadora SamsungДокумент34 страницыReparación de Tarjeta de Lavadora Samsungjulfo0575% (4)
- 5-LAJPE 815 Sandra Forero PDFДокумент5 страниц5-LAJPE 815 Sandra Forero PDFWilder Montaño GarciaОценок пока нет
- Fundamentos de Transferencia de CalorДокумент10 страницFundamentos de Transferencia de CalorisabellaОценок пока нет
- Energía Geotérmica: Una Fuente Renovable InteriorДокумент58 страницEnergía Geotérmica: Una Fuente Renovable Interiorgeologia1976Оценок пока нет
- Barragan 1Документ14 страницBarragan 1Israel PeñaОценок пока нет
- Cambios TermicosДокумент8 страницCambios Termicoschanito230% (1)
- Homogeneización láctea: proceso, teorías y equiposДокумент53 страницыHomogeneización láctea: proceso, teorías y equiposJuan Carlos MedranoОценок пока нет
- AUMENTO de NIVEL DEL MAR El Aumento de Los Niveles Del Mar Está Vinculado A Tres Factores PrincipalesДокумент2 страницыAUMENTO de NIVEL DEL MAR El Aumento de Los Niveles Del Mar Está Vinculado A Tres Factores PrincipalesCristian AlejandroОценок пока нет
- Celda de ArnoldДокумент13 страницCelda de ArnoldHamiltonОценок пока нет
- Examen final termodinámicaДокумент15 страницExamen final termodinámicajuan gabriel diaz0% (1)
- Práctica 1 Pérdidas Por Fricción-FINALДокумент16 страницPráctica 1 Pérdidas Por Fricción-FINALBenjamín LunaОценок пока нет
- Calculo de Un Reactor Catalitico de Lecho FluidizadoДокумент39 страницCalculo de Un Reactor Catalitico de Lecho Fluidizador2rovbОценок пока нет
- Morteros Autonivelantes de Elevada Conductividad TérmicaДокумент264 страницыMorteros Autonivelantes de Elevada Conductividad TérmicaDavid Charles Llerena MallquiОценок пока нет
- 032c Física IДокумент7 страниц032c Física IAlexander OteroОценок пока нет
- Informe de Laboratorio 4-TermodinamicaДокумент10 страницInforme de Laboratorio 4-TermodinamicaMarianela BrañezОценок пока нет
- Tesis Mendez MenesesДокумент90 страницTesis Mendez MenesesEduardo Fernandez DazaОценок пока нет
- Termologia Alumno CompletoДокумент106 страницTermologia Alumno CompletoWilliam TaipeОценок пока нет
- Calorimetría, calor específico y calor latente de vaporizaciónДокумент7 страницCalorimetría, calor específico y calor latente de vaporizaciónLeandro LopezОценок пока нет
- Operaciones UnitariasДокумент3 страницыOperaciones UnitariasNathy Calderón BaqueОценок пока нет
- Fisica-Taller Prueba Saber 11°Документ14 страницFisica-Taller Prueba Saber 11°Breyner Joel Ortiz DiazОценок пока нет
- Investigacion de Ciclos TermodinamicosДокумент24 страницыInvestigacion de Ciclos TermodinamicosDaniel adair Perez muñozОценок пока нет
- FISICA TermodinámicaДокумент11 страницFISICA TermodinámicaDiego Valdez GarcíaОценок пока нет
- Instrucciones Aire Acondicionado PDFДокумент33 страницыInstrucciones Aire Acondicionado PDFJuan Vega GallegoОценок пока нет
- 7 formas de ahorrar energía en aire acondicionadoДокумент3 страницы7 formas de ahorrar energía en aire acondicionadoJairo DavidОценок пока нет
- Barco pop pop funcionamientoДокумент16 страницBarco pop pop funcionamientogualberto_pillcoОценок пока нет
- Modelacion de SecadoДокумент5 страницModelacion de SecadoFrank Vela RíosОценок пока нет
- Teoria Los EcosistemasДокумент7 страницTeoria Los EcosistemasAlexander MaldonadoОценок пока нет
- 3 Intercambiador Tubos ConcentricosДокумент9 страниц3 Intercambiador Tubos Concentricosmaria camila CandamilОценок пока нет
- Curva de Daños de ConductoresДокумент16 страницCurva de Daños de Conductoressignaltracer100% (2)
- Numeros Adimensionales PDFДокумент10 страницNumeros Adimensionales PDFBraulioCoroОценок пока нет
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másОт EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másРейтинг: 2.5 из 5 звезд2.5/5 (3)
- El trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoОт EverandEl trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoРейтинг: 4 из 5 звезд4/5 (30)
- Influencia. La psicología de la persuasiónОт EverandInfluencia. La psicología de la persuasiónРейтинг: 4.5 из 5 звезд4.5/5 (14)
- Cómo Seducir Mujeres con tu Celular: Envía poderosos mensajes de texto que cautivarán a las mujeres que siempre has deseado tener en tu vidaОт EverandCómo Seducir Mujeres con tu Celular: Envía poderosos mensajes de texto que cautivarán a las mujeres que siempre has deseado tener en tu vidaРейтинг: 4 из 5 звезд4/5 (9)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroОт EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroРейтинг: 4 из 5 звезд4/5 (1)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaОт EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaРейтинг: 4.5 из 5 звезд4.5/5 (116)
- Mecánica aplicada al diseño de los elementos de máquinas: Temas básicos de resistencia de materiales aplicables al diseño de arboles y ejesОт EverandMecánica aplicada al diseño de los elementos de máquinas: Temas básicos de resistencia de materiales aplicables al diseño de arboles y ejesРейтинг: 5 из 5 звезд5/5 (1)
- Auditoría de seguridad informática: Curso prácticoОт EverandAuditoría de seguridad informática: Curso prácticoРейтинг: 5 из 5 звезд5/5 (1)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetОт EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetРейтинг: 5 из 5 звезд5/5 (7)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaОт EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaРейтинг: 5 из 5 звезд5/5 (1)
- Arduino. Guía práctica de fundamentos y simulación: RobóticaОт EverandArduino. Guía práctica de fundamentos y simulación: RobóticaРейтинг: 4.5 из 5 звезд4.5/5 (5)
- Lean: La Guía Fundamental para Lean Startup, Lean Six Sigma, Lean Analytics, Lean Enterprise, Lean Manufacturing, Scrum, Gestión Agile de Proyectos y KanbanОт EverandLean: La Guía Fundamental para Lean Startup, Lean Six Sigma, Lean Analytics, Lean Enterprise, Lean Manufacturing, Scrum, Gestión Agile de Proyectos y KanbanРейтинг: 5 из 5 звезд5/5 (1)
- Cómo ser un Ninja Social: Supera el miedo a hablar con desconocidos, crea conexiones con cualquiera y se la persona más interesante del lugarОт EverandCómo ser un Ninja Social: Supera el miedo a hablar con desconocidos, crea conexiones con cualquiera y se la persona más interesante del lugarРейтинг: 4.5 из 5 звезд4.5/5 (4)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.От EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Рейтинг: 4.5 из 5 звезд4.5/5 (54)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...От EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Рейтинг: 5 из 5 звезд5/5 (4)
- Aprende electrónica con Arduino: Una guía ilustrada para principiantes sobre la informática físicaОт EverandAprende electrónica con Arduino: Una guía ilustrada para principiantes sobre la informática físicaОценок пока нет
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.От EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Рейтинг: 4 из 5 звезд4/5 (51)
- Energía solar autónoma: Una guía práctica para entender e instalar sistemas fotovoltaicos y de bateríasОт EverandEnergía solar autónoma: Una guía práctica para entender e instalar sistemas fotovoltaicos y de bateríasОценок пока нет