Вам также может понравиться
- FPGA Design Tutorial - Advanced HDL SynthesisДокумент4 страницыFPGA Design Tutorial - Advanced HDL SynthesisVIJAYPUTRAОценок пока нет
- Fpga TutorialДокумент10 страницFpga Tutorialgsavithri_4017Оценок пока нет
- Low Power Design of Digital SystemsДокумент28 страницLow Power Design of Digital SystemssuperECEОценок пока нет
- Design Choices - EthernetДокумент29 страницDesign Choices - EthernetJasmine MysticaОценок пока нет
- 8-Bit PIC® MicrocontrollersДокумент12 страниц8-Bit PIC® Microcontrollersகாஸ்ட்ரோ சின்னா100% (1)
- Ap7202-Asic and FpgaДокумент12 страницAp7202-Asic and FpgaMOTHI.R MEC-AP/ECEОценок пока нет
- Embedded SystemsДокумент57 страницEmbedded SystemsSyed ZОценок пока нет
- Advanced Processor SuperscalarclassДокумент73 страницыAdvanced Processor SuperscalarclassKanaga Varatharajan50% (2)
- Application of UartДокумент53 страницыApplication of Uartvarsha8108100% (1)
- Semiconductor MemoriesДокумент81 страницаSemiconductor MemoriesYash DodiaОценок пока нет
- Cortex R4 White PaperДокумент20 страницCortex R4 White PaperRAJARAMОценок пока нет
- Thesis On FPGAДокумент79 страницThesis On FPGAAshish BabuОценок пока нет
- Power Reduction Through RTL Clock GatingДокумент10 страницPower Reduction Through RTL Clock GatingAishwarya TekkalakotaОценок пока нет
- Lecture 1: Introduction To ARM Based Embedded SystemsДокумент24 страницыLecture 1: Introduction To ARM Based Embedded SystemsSaurabh HedaОценок пока нет
- Asic & Fpga Design QB For MeДокумент24 страницыAsic & Fpga Design QB For MejebajohannahsamuelОценок пока нет
- Introduction To Embedded SystemsДокумент50 страницIntroduction To Embedded SystemsAmbika NaikОценок пока нет
- ESARM Unit-III and IV Slides MergedДокумент301 страницаESARM Unit-III and IV Slides MergedShashipreetham LakkakulaОценок пока нет
- Uart BasicsДокумент16 страницUart BasicsM.k. JhaОценок пока нет
- ARM Processors Lecture 2015-11-05Документ169 страницARM Processors Lecture 2015-11-05maheshbabu527Оценок пока нет
- Introduction To Asics: Ni Logic Pvt. LTD., PuneДокумент84 страницыIntroduction To Asics: Ni Logic Pvt. LTD., PuneankurОценок пока нет
- LPC 2378 Development BoardДокумент160 страницLPC 2378 Development BoardDinesh KumarОценок пока нет
- FPGA Training: by Ushasri Merugu 21 Dec 2012Документ5 страницFPGA Training: by Ushasri Merugu 21 Dec 2012rkguptha_514369372Оценок пока нет
- Group 12 ReportДокумент18 страницGroup 12 ReportPoonam GuptaОценок пока нет
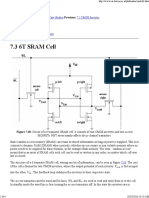
- 7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterДокумент4 страницы7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterGowtham SpОценок пока нет
- Asic Design Cadence DR D Gracia Nirmala RaniДокумент291 страницаAsic Design Cadence DR D Gracia Nirmala RaniAdline RiniОценок пока нет
- ASICДокумент34 страницыASICpankajОценок пока нет
- Introduction To System On ChipДокумент110 страницIntroduction To System On ChipKiệt PhạmОценок пока нет
- Fpga Based System DesignДокумент30 страницFpga Based System DesignKrishna Kumar100% (1)
- Advanced Asic Chip SynthesisДокумент126 страницAdvanced Asic Chip SynthesispravinОценок пока нет
- Low Power VLSI DesignДокумент20 страницLow Power VLSI DesignansuharshОценок пока нет
- CMOS Power Dissipation and Trends: R. AmirtharajahДокумент60 страницCMOS Power Dissipation and Trends: R. AmirtharajahmarshaldvtОценок пока нет
- MOSFET Scaling: Dr. Rajan Pandey Associate Professor, SENSEДокумент6 страницMOSFET Scaling: Dr. Rajan Pandey Associate Professor, SENSEVibha M VОценок пока нет
- Systems On Chip (SoC) - 01Документ47 страницSystems On Chip (SoC) - 01AlfiyanaОценок пока нет
- HWSW Co Design Unit-1notesДокумент195 страницHWSW Co Design Unit-1notesswapna revuriОценок пока нет
- Physical DesignДокумент12 страницPhysical DesignPallavi ChОценок пока нет
- Computer ArchitectureДокумент104 страницыComputer ArchitectureapuurvaОценок пока нет
- MCB2300 CanДокумент14 страницMCB2300 CanMichaelОценок пока нет
- ARM Introduction-1Документ26 страницARM Introduction-1040-NishanthОценок пока нет
- Implementing A Source Synchronous Interface v2.0Документ47 страницImplementing A Source Synchronous Interface v2.0Gautham PopuriОценок пока нет
- Lecture 2 - ARM Instruction SetДокумент42 страницыLecture 2 - ARM Instruction SetSuhaib AbugderaОценок пока нет
- Real-Time Speech Pitch Shifting On An FPGA (Estephan Sawyer WanningerДокумент20 страницReal-Time Speech Pitch Shifting On An FPGA (Estephan Sawyer Wanningerklumpakojis0% (1)
- Microsoft PowerPoint - SoC Design Flow Tools CodesignДокумент110 страницMicrosoft PowerPoint - SoC Design Flow Tools CodesignRathan NОценок пока нет
- Protyping and EmulationДокумент49 страницProtyping and EmulationAbdur-raheem Ashrafee Bepar0% (1)
- Embedded Systems: Theory and DesignДокумент27 страницEmbedded Systems: Theory and Designaashishkumarneelkant0% (1)
- STM 32Документ8 страницSTM 32Simone FontanaОценок пока нет
- Haps-54 March2009 ManualДокумент74 страницыHaps-54 March2009 Manualjohn92691Оценок пока нет
- Tiva C Series LaunchPadДокумент152 страницыTiva C Series LaunchPadhuyvt01Оценок пока нет
- ARM Interrupt ProcessingДокумент33 страницыARM Interrupt Processinglovet essampongОценок пока нет
- Fpga Control Motor AsincronДокумент7 страницFpga Control Motor AsincronVasileSpireaОценок пока нет
- Hierarchical Timing Analysis WPДокумент7 страницHierarchical Timing Analysis WPvpsampathОценок пока нет
- Csa Mod 2Документ28 страницCsa Mod 2anusarat100% (1)
- Fundamentals in Digital IC DesignДокумент16 страницFundamentals in Digital IC DesignSiddharth PanditОценок пока нет
- System On Chip (SOC) (1) Chapter 1Документ25 страницSystem On Chip (SOC) (1) Chapter 1Mohammed HarisОценок пока нет
- FPGA ArchitectureДокумент39 страницFPGA ArchitectureeeshgargОценок пока нет
- Semi Custom Vlsi DesignДокумент25 страницSemi Custom Vlsi DesignPraveen KumarОценок пока нет
- Embeded Systems Unit 1Документ73 страницыEmbeded Systems Unit 1Srinivasa RaoОценок пока нет
- Assignment Set I (1) UpdateДокумент15 страницAssignment Set I (1) UpdateAshish OjhaОценок пока нет
- Introduction To Embedded Systems ByshibukvДокумент36 страницIntroduction To Embedded Systems ByshibukvNyein NyeinОценок пока нет
- Embedded System IntroductionДокумент42 страницыEmbedded System IntroductionHahahaОценок пока нет
- Ex-1 Up Down CounterДокумент16 страницEx-1 Up Down CounterSaurabh AnmadwarОценок пока нет
- Orcad Fpga DsДокумент4 страницыOrcad Fpga Dssamarra25Оценок пока нет
- Introduction To VLSI DesignДокумент20 страницIntroduction To VLSI DesignRoshdy AbdelRassoulОценок пока нет
- T - Type 60kWДокумент11 страницT - Type 60kWJhonatan Leandro Clavijo TrochesОценок пока нет
- Ug470 7series ConfigДокумент174 страницыUg470 7series ConfigyusufОценок пока нет
- Computador Cuántico Basado en FpgaДокумент14 страницComputador Cuántico Basado en FpgaAndres GiraldoОценок пока нет
- Xilinx ddr2 Memory Interfaces PDFДокумент72 страницыXilinx ddr2 Memory Interfaces PDFJagadish BaluvuОценок пока нет
- Speedster™ Fpga Family: Product BriefДокумент2 страницыSpeedster™ Fpga Family: Product BriefJessica ThompsonОценок пока нет
- TSF Codan Envoy enДокумент3 страницыTSF Codan Envoy enLuís ManuelОценок пока нет
- 2 Vladan Popovic Et Al.: 2 Related WorkДокумент10 страниц2 Vladan Popovic Et Al.: 2 Related WorkRich ManОценок пока нет
- 10 1109@tce 2017 014949Документ9 страниц10 1109@tce 2017 014949Subha ShiniОценок пока нет
- Image Edge Detection in FPGA: Tejas Khairnar, Harikiran, Avinash Chandgude, Sivanantham S, Sivasankaran KДокумент4 страницыImage Edge Detection in FPGA: Tejas Khairnar, Harikiran, Avinash Chandgude, Sivanantham S, Sivasankaran Kdivya_cestОценок пока нет
- Whitepaper - ASA 5585-X ArchitectureДокумент6 страницWhitepaper - ASA 5585-X Architecturesubha99RanjanОценок пока нет
- VLSI Interview QuestionsДокумент112 страницVLSI Interview QuestionsrAM100% (10)
- AXI Multi-Bus Memory Controller: Block DiagramДокумент2 страницыAXI Multi-Bus Memory Controller: Block Diagrammark bОценок пока нет
- Embedded Systems PDFДокумент79 страницEmbedded Systems PDFsatyaОценок пока нет
- Desktop Engineering - 2014-02Документ52 страницыDesktop Engineering - 2014-02Бушинкин ВладиславОценок пока нет
- AC 20-152 DO-254 Approval To FAAДокумент2 страницыAC 20-152 DO-254 Approval To FAAmichelson00Оценок пока нет
- Advanced Driver Assistance (ADAS) Solutions GuideДокумент29 страницAdvanced Driver Assistance (ADAS) Solutions GuideDharmody0% (1)
- BlueArc WP Mercury ArchitectureДокумент20 страницBlueArc WP Mercury ArchitecturenexusplexusОценок пока нет
- Implementing AC97Документ112 страницImplementing AC97Mihai MateiОценок пока нет
- Lab7 Honors PDFДокумент19 страницLab7 Honors PDFPrasanth VarasalaОценок пока нет
- Design Optimization For High-Performance Computing Using FPGAДокумент19 страницDesign Optimization For High-Performance Computing Using FPGAheartdreamplusОценок пока нет
- Fully Reused VLSI Architecture of FMO/Manchester Encoding Using SOLS Technique For DSRC ApplicationsДокумент16 страницFully Reused VLSI Architecture of FMO/Manchester Encoding Using SOLS Technique For DSRC ApplicationssnehaОценок пока нет
- Wp502 PythonДокумент12 страницWp502 PythonhiperboreoatlantecОценок пока нет
- Simmips A Mips System SimulatorДокумент8 страницSimmips A Mips System Simulatorpahia3118Оценок пока нет
- Introduction To FPGA HSIOДокумент30 страницIntroduction To FPGA HSIOvineeth chowdaryОценок пока нет
- E103.d 2020pap0015Документ11 страницE103.d 2020pap0015ATHIRA V RОценок пока нет
- Vlsi ch1Документ64 страницыVlsi ch1Nihar ranjan AditОценок пока нет