Вам также может понравиться
- Compilador C CCS y Simulador Proteus para Microcontroladores PICОт EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICРейтинг: 2.5 из 5 звезд2.5/5 (5)
- Display 7 Segment OsДокумент9 страницDisplay 7 Segment OsDaniel MateОценок пока нет
- Laboratorio #5Документ19 страницLaboratorio #5GROVER MILTON ARRIAGA MENACHOОценок пока нет
- Tutorial-Programacion de Microcontroladores Pic18f2550 Con BasicДокумент560 страницTutorial-Programacion de Microcontroladores Pic18f2550 Con Basicmirkovs100% (4)
- Equipo Gris - Proyecto Final (Cronómetro)Документ13 страницEquipo Gris - Proyecto Final (Cronómetro)Mario DxОценок пока нет
- Experiencia3 PDFДокумент6 страницExperiencia3 PDFAbel Garzón DazaОценок пока нет
- Practica 4 ModДокумент12 страницPractica 4 ModIsaac Tonatiuh Ayala PérezОценок пока нет
- Cronometro 2013Документ6 страницCronometro 2013Esteban GoyesОценок пока нет
- Generador Lector de Señales Pantalla LCD en Lenguaje CДокумент5 страницGenerador Lector de Señales Pantalla LCD en Lenguaje CCamilo NasОценок пока нет
- Contador Pulsos Con MotorДокумент16 страницContador Pulsos Con Motorrgonzalg0% (1)
- LCD y TECLADO en Atmel StudioДокумент13 страницLCD y TECLADO en Atmel StudioVICTOR HUGO VANEGAS CARVAJALОценок пока нет
- Pantalla LCD en Pic 16F887Документ20 страницPantalla LCD en Pic 16F887ESAU ZamudioОценок пока нет
- Lab 04 Entradas y Salidas Parte 2Документ8 страницLab 04 Entradas y Salidas Parte 2Clinton Christian Chipana ParisuanaОценок пока нет
- Manual de Prácticas Pic 16f688Документ15 страницManual de Prácticas Pic 16f688txusmaster_hackОценок пока нет
- Controlar Display de 7 Segmentos Con Shift RegisterДокумент27 страницControlar Display de 7 Segmentos Con Shift RegisterPOLLO45100% (1)
- Lab 04 Entradas y Salidas Parte 2Документ9 страницLab 04 Entradas y Salidas Parte 2Dilman Alberto Ccotahuana HuarcaОценок пока нет
- 1.puertos de Entrada-SalidaДокумент43 страницы1.puertos de Entrada-SalidaJesus Maria LizarzabalОценок пока нет
- Contador de Vueltas para BobinadoraДокумент19 страницContador de Vueltas para BobinadoraArmando CajahuaringaОценок пока нет
- Contador de Vueltas para BobinadoraДокумент19 страницContador de Vueltas para BobinadoraArmando Cajahuaringa100% (1)
- Laboratorio 9 Modulo ADC y PWM Con El PIC 16F877AДокумент9 страницLaboratorio 9 Modulo ADC y PWM Con El PIC 16F877AacajahuaringaОценок пока нет
- Informe Laboratorio Digitales 3 Ingenieria Electronica UpcДокумент12 страницInforme Laboratorio Digitales 3 Ingenieria Electronica UpcÂld-âîr ÂûrêlîjûsОценок пока нет
- Informe LCDДокумент6 страницInforme LCDdenniseduОценок пока нет
- MicrocontroladoresДокумент17 страницMicrocontroladoresPedro CastiblancoОценок пока нет
- Lab13 - Funciones Con PIC18F4550 - AДокумент18 страницLab13 - Funciones Con PIC18F4550 - AMichael NarcisoОценок пока нет
- Inf Lab MicrocontraladoresДокумент10 страницInf Lab MicrocontraladoresNuñez Jeff StОценок пока нет
- Reporte 1 MicrosДокумент8 страницReporte 1 MicrosEdgar ReyesОценок пока нет
- LengEnsambladorSobrePIC16F84 1Документ9 страницLengEnsambladorSobrePIC16F84 1SancezgarОценок пока нет
- Ventajas de Multiplexar Display 7 SegmentosДокумент12 страницVentajas de Multiplexar Display 7 SegmentosIsrael MartinОценок пока нет
- Curso Pic Ccs Compiler01-2014Документ87 страницCurso Pic Ccs Compiler01-2014Magus CardenasОценок пока нет
- Contador Pic16f877aДокумент11 страницContador Pic16f877aNuñez Jeff StОценок пока нет
- REPORTE UNIDAD 1 Dispositivos ProgramablesДокумент10 страницREPORTE UNIDAD 1 Dispositivos ProgramablesMario Atilano GallegoОценок пока нет
- Semáforo Con Un PIC16F628Документ3 страницыSemáforo Con Un PIC16F628Saul RamirezОценок пока нет
- Practica #2 Control de Un Display de 7 SegmentosДокумент9 страницPractica #2 Control de Un Display de 7 SegmentosJuan Pablo Garcia LanderoОценок пока нет
- Taco MetroДокумент25 страницTaco MetrofernndaОценок пока нет
- Informe AdcДокумент14 страницInforme AdcJuaanGoo AlvarezОценок пока нет
- Display de 7 SegmentosДокумент9 страницDisplay de 7 SegmentosLuis PeñaОценок пока нет
- Controlar Display de 7 Segmentos Con Shift RegisterДокумент20 страницControlar Display de 7 Segmentos Con Shift RegisterfelipeneyraОценок пока нет
- Manejo de Display LCD Con Micro Control Ad or HC08Документ9 страницManejo de Display LCD Con Micro Control Ad or HC08ClauditnОценок пока нет
- Pantalla LCD de CaracteresДокумент13 страницPantalla LCD de CaracteresDavid Uno Dos100% (2)
- Compilador y Funciones Básicas1Документ50 страницCompilador y Funciones Básicas1Marco Antonio SedeñoОценок пока нет
- Informe - PicasyFijas (Pic 16f) AssemblerДокумент21 страницаInforme - PicasyFijas (Pic 16f) Assemblerdillam27277774Оценок пока нет
- Diseño de Programación para Control Ascendente y Descendente Mediante PulsadoresДокумент17 страницDiseño de Programación para Control Ascendente y Descendente Mediante PulsadoresSEGUNDO NELSON PERUGACHI MALDONADOОценок пока нет
- CompilerДокумент6 страницCompilerAdrianMartinezMendezОценок пока нет
- Lab 04 Entradas y Salidas Parte 2-4Документ12 страницLab 04 Entradas y Salidas Parte 2-4Dilman Alberto Ccotahuana HuarcaОценок пока нет
- Programación Basica de Microcontroladores PIC en CДокумент6 страницProgramación Basica de Microcontroladores PIC en CMijael Edward Ttacca HuallaОценок пока нет
- Practica 2Документ9 страницPractica 2stefany toroОценок пока нет
- Lab MC P3 1618200Документ9 страницLab MC P3 1618200luis gonzalezОценок пока нет
- Controlar Display de 7 Segmentos Con Shift RegisterДокумент20 страницControlar Display de 7 Segmentos Con Shift RegisterfelipeneyraОценок пока нет
- Lab07 ConversionAD PIC18F4550Документ23 страницыLab07 ConversionAD PIC18F4550David Montesco100% (2)
- Programación de MCUДокумент28 страницProgramación de MCUapi-27535945100% (2)
- Reporte2-3 HMJДокумент14 страницReporte2-3 HMJHéctorMoralesJiménezОценок пока нет
- Práctica 3 (Conteo Ascendente y Descendente 0 A 9) PDFДокумент7 страницPráctica 3 (Conteo Ascendente y Descendente 0 A 9) PDFChristian Geovanni Hernandez MurilloОценок пока нет
- Reloj Digital Con PicДокумент9 страницReloj Digital Con PicIvanmcxОценок пока нет
- Taller 4-Manejo de Registro de DesplazamientoДокумент8 страницTaller 4-Manejo de Registro de Desplazamientoferney alexander nava trujilloОценок пока нет
- TAREA 3 - MICRO Contador Con DisplayДокумент6 страницTAREA 3 - MICRO Contador Con DisplayMiltonОценок пока нет
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeОт EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeОценок пока нет
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosОт EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosРейтинг: 5 из 5 звезд5/5 (5)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109От EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Оценок пока нет
- 100 circuitos de shields para arduino (español)От Everand100 circuitos de shields para arduino (español)Рейтинг: 3.5 из 5 звезд3.5/5 (3)
- Recomendaciones de SST 2021Документ1 страницаRecomendaciones de SST 2021Edu PomaОценок пока нет
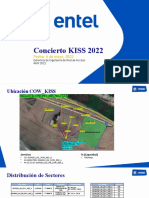
- Concierto KISS 2022 - Propuesta3Документ7 страницConcierto KISS 2022 - Propuesta3Edu PomaОценок пока нет
- Carta - HUERTOS DE MANCHAYДокумент2 страницыCarta - HUERTOS DE MANCHAYEdu PomaОценок пока нет
- NTP 010181538 CS Moccopata 08.11.22Документ2 страницыNTP 010181538 CS Moccopata 08.11.22Edu PomaОценок пока нет
- Rotulo 202203704677 20220430143615Документ1 страницаRotulo 202203704677 20220430143615Edu PomaОценок пока нет
- CASACANCHA - Informe de Puesta A Dispisición Sitio ATPДокумент12 страницCASACANCHA - Informe de Puesta A Dispisición Sitio ATPEdu PomaОценок пока нет
- Carta de AccesoДокумент1 страницаCarta de AccesoGonzalo VegaОценок пока нет
- Concierto ANUEL AA - 19.05.2022Документ7 страницConcierto ANUEL AA - 19.05.2022Edu PomaОценок пока нет
- Etiquetas RTN Cable If Site - Estela MarisДокумент1 страницаEtiquetas RTN Cable If Site - Estela MarisEdu PomaОценок пока нет
- SST-F-09 Permiso para Trabajos en Altura V.00Документ1 страницаSST-F-09 Permiso para Trabajos en Altura V.00Edu PomaОценок пока нет
- El Régimen Tributario RusДокумент3 страницыEl Régimen Tributario RusEdu PomaОценок пока нет
- Regimen T. MypeДокумент5 страницRegimen T. MypeEdu PomaОценок пока нет
- Etiquetas CP - Agregador - PajonalДокумент2 страницыEtiquetas CP - Agregador - PajonalEdu PomaОценок пока нет
- Copia de Canalización Frecuencias Perú' ContigoДокумент47 страницCopia de Canalización Frecuencias Perú' ContigoEdu PomaОценок пока нет
- Reporte Ambiental Smallcell MarcopataДокумент30 страницReporte Ambiental Smallcell MarcopataEdu PomaОценок пока нет
- Rerporte Fotográfico Desmontaje Smallcell MARCOPATAДокумент5 страницRerporte Fotográfico Desmontaje Smallcell MARCOPATAEdu PomaОценок пока нет
- Concierto Ricardo Arjona Propuesta Jockey Plaza La Pelouse 20220909Документ7 страницConcierto Ricardo Arjona Propuesta Jockey Plaza La Pelouse 20220909Edu PomaОценок пока нет
- CC in 0635 21Документ2 страницыCC in 0635 21Edu PomaОценок пока нет
- Etiquetas RTN Cable If Site - Azangaro To HuayruruniДокумент1 страницаEtiquetas RTN Cable If Site - Azangaro To HuayruruniEdu PomaОценок пока нет
- Pantallas Interferencia TallamonteДокумент3 страницыPantallas Interferencia TallamonteEdu PomaОценок пока нет
- Reporte Fotografico Antes - Despues - 4T4R - PILCOMAYOДокумент1 страницаReporte Fotografico Antes - Despues - 4T4R - PILCOMAYOEdu PomaОценок пока нет
- Reporte Fotografico Antes - Despues - 4T4RДокумент1 страницаReporte Fotografico Antes - Despues - 4T4REdu PomaОценок пока нет
- Reporte Fotografico Antes - Despues - 4T4R - HUANCANДокумент1 страницаReporte Fotografico Antes - Despues - 4T4R - HUANCANEdu PomaОценок пока нет
- REPORTE - FOTOGRAFICO - JU - 013020 - TARMA - PLAZA - 2da EntregaДокумент10 страницREPORTE - FOTOGRAFICO - JU - 013020 - TARMA - PLAZA - 2da EntregaEdu Poma100% (1)
- Reporte de Desmontaje - 0130407 - LM - ArmendarizДокумент4 страницыReporte de Desmontaje - 0130407 - LM - ArmendarizEdu PomaОценок пока нет
- Reporte Fotografico Antes - Despues - 4T4R - PILCOMAYOДокумент1 страницаReporte Fotografico Antes - Despues - 4T4R - PILCOMAYOEdu PomaОценок пока нет
- Reporte de Desmontaje - 0130407 - LM - ArmendarizДокумент4 страницыReporte de Desmontaje - 0130407 - LM - ArmendarizEdu PomaОценок пока нет
- 4T6S Site Report Tarma PlazaДокумент9 страниц4T6S Site Report Tarma PlazaEdu PomaОценок пока нет
- Estructura de Proyecto de Ingenieria 2016Документ4 страницыEstructura de Proyecto de Ingenieria 2016Edu PomaОценок пока нет
- Medicament OsДокумент1 страницаMedicament OsEdu PomaОценок пока нет
- Necesidades Area de Mantenimiento Citrofrut Planta HuichihuayanДокумент2 страницыNecesidades Area de Mantenimiento Citrofrut Planta HuichihuayanEduardo Molina PerezОценок пока нет
- Análisis Sistémico de Objeto Técnico La Maquina de SoldarДокумент14 страницAnálisis Sistémico de Objeto Técnico La Maquina de SoldarIng. Gerardo Sánchez Nájera50% (6)
- Teorias Thurstone y Cattell PsicologiaДокумент3 страницыTeorias Thurstone y Cattell Psicologiayelitza941050% (2)
- Fundamentos de AntropologiaДокумент7 страницFundamentos de AntropologiaRusbel RojasОценок пока нет
- Arco Reflejo y HomeostasisДокумент2 страницыArco Reflejo y HomeostasisDaniel Tena Chavira100% (1)
- Teoria Articuladas-RigidasДокумент151 страницаTeoria Articuladas-RigidasJuan Diego González MartinezОценок пока нет
- Guia Didáctica de Escuela para PadresДокумент17 страницGuia Didáctica de Escuela para PadresraulramossilvaОценок пока нет
- Análisis de Elementos SimilaresДокумент5 страницAnálisis de Elementos SimilaresAlex Ivan Bautista DiazОценок пока нет
- Trabajo Académico Sobre Drenaje de AeropuertosДокумент10 страницTrabajo Académico Sobre Drenaje de AeropuertosWilmer Acuña MarínОценок пока нет
- Borrador Plan Maestro Oconal - 19!11!2009Документ129 страницBorrador Plan Maestro Oconal - 19!11!2009pericoton100% (2)
- La Rebelion Del Espacio Vivido Teoria PDFДокумент639 страницLa Rebelion Del Espacio Vivido Teoria PDFEnrique Szendro-MoralesОценок пока нет
- Ejercicio de Seleccion de HerramientasДокумент9 страницEjercicio de Seleccion de HerramientasAgustinОценок пока нет
- Wright MillsДокумент149 страницWright MillsAttilio Folliero100% (4)
- Sistem As PartДокумент15 страницSistem As PartDiego Saúl RamírezОценок пока нет
- Marco Legal - MarketingДокумент4 страницыMarco Legal - MarketingGiovanna Tapia SánchezОценок пока нет
- Estudios de Autopsia Psicologica, Una RevisionДокумент8 страницEstudios de Autopsia Psicologica, Una RevisionMaría Alejandra PérezОценок пока нет
- Fundamentos Del Marketing y La Publicidad 3 de La Semana 10 A La 12-1Документ34 страницыFundamentos Del Marketing y La Publicidad 3 de La Semana 10 A La 12-1Angel GoicocheaОценок пока нет
- Quiz 1 Fundamentos de Servicio Al ClienteДокумент6 страницQuiz 1 Fundamentos de Servicio Al Cliente19860607100% (1)
- Foucault Michel - Entrevista Sobre GeografíaДокумент16 страницFoucault Michel - Entrevista Sobre GeografíaRaimundo LulioОценок пока нет
- Najmanovich, Denise Configurazoom Los Enfoques de La ComplejidadДокумент33 страницыNajmanovich, Denise Configurazoom Los Enfoques de La ComplejidadCecy MartinezОценок пока нет
- Periódico La Voz EducativaДокумент3 страницыPeriódico La Voz EducativaLuis JimenezОценок пока нет
- Pud Cuatro (7 - 8) Proyecto QuintoДокумент45 страницPud Cuatro (7 - 8) Proyecto QuintoJavier Tinoco100% (2)
- Aprendizajes Esperados de Sonora y Civismo 3er. GradoДокумент4 страницыAprendizajes Esperados de Sonora y Civismo 3er. GradoKrystell PáezОценок пока нет
- Alfred NobelДокумент16 страницAlfred NobelMarly AranaОценок пока нет
- Herramientas de CalidadДокумент6 страницHerramientas de CalidadYazz LynОценок пока нет
- El Analizador y El Analista. Georges Lapassade 1979Документ49 страницEl Analizador y El Analista. Georges Lapassade 1979Anonymous PShR7Ri100% (1)
- Examen Final de ModuloДокумент3 страницыExamen Final de ModuloPedro Jorge RodriguezОценок пока нет
- Feedback Seas 2019Документ2 страницыFeedback Seas 2019Angel González Herreros0% (1)
- Plantillas para La Elaboracion Del DiagnosticoДокумент6 страницPlantillas para La Elaboracion Del DiagnosticohenemeОценок пока нет
- G) Recuperación de PendientesДокумент4 страницыG) Recuperación de PendientesMiguel Ángel Calzado VélezОценок пока нет