Вам также может понравиться
- 87 - Repérage Des Axes ProfДокумент3 страницы87 - Repérage Des Axes ProfntayoubОценок пока нет
- Isostatisme ExpoДокумент12 страницIsostatisme ExpoHoucine TelmesliОценок пока нет
- F3 ApefДокумент5 страницF3 ApefZouhairОценок пока нет
- ch6 Isostatisme PDFДокумент12 страницch6 Isostatisme PDFTriki BilelОценок пока нет
- Exercice BE2 Ensam MeknesДокумент8 страницExercice BE2 Ensam MeknesThe ShadowОценок пока нет
- Gamme CorrigéДокумент2 страницыGamme CorrigéMohsen SaidiОценок пока нет
- Les Efforts de CoupeДокумент11 страницLes Efforts de CoupeRaniya TebbalОценок пока нет
- Les Tolérances GéométriquesДокумент11 страницLes Tolérances GéométriquesakouОценок пока нет
- 2 Éme Cours de Dessin Industriel 3 CMДокумент14 страниц2 Éme Cours de Dessin Industriel 3 CMMohamed IsLemОценок пока нет
- Dessin D'ensembleДокумент6 страницDessin D'ensembleamri mohamed100% (1)
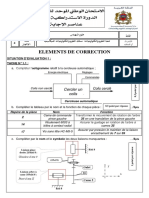
- Evaluation Isostatisme PDFДокумент4 страницыEvaluation Isostatisme PDFGenie Meca100% (1)
- TD La Commande Numerique Des Machines OutilsДокумент2 страницыTD La Commande Numerique Des Machines OutilsWilliam DechangОценок пока нет
- Chapitre Isostatisme (Important)Документ3 страницыChapitre Isostatisme (Important)honi100% (1)
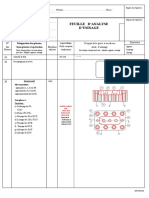
- Feuille Analyse Gamme UsinageДокумент2 страницыFeuille Analyse Gamme UsinageBouhdida MohamedОценок пока нет
- Exercices Isostatisme 2009Документ4 страницыExercices Isostatisme 2009maraghni_hassine7592Оценок пока нет
- Dossier Manipulation Fraiseuse PDFДокумент21 страницаDossier Manipulation Fraiseuse PDFMohamed Larbi100% (1)
- Calculs RoulementsДокумент1 страницаCalculs RoulementscОценок пока нет
- Partie 8 - Procédés de Fabrication Sans Outil Coupant PDFДокумент11 страницPartie 8 - Procédés de Fabrication Sans Outil Coupant PDFamalОценок пока нет
- Cours Tolerances Geometriques eДокумент5 страницCours Tolerances Geometriques eBouabdellaoui saif ennasrОценок пока нет
- Définition Normalisée Des Axes Numériques D'une MOCNДокумент3 страницыDéfinition Normalisée Des Axes Numériques D'une MOCNhp3bpОценок пока нет
- La Mise en Position 1ere Partie de La Norme - PROFДокумент6 страницLa Mise en Position 1ere Partie de La Norme - PROFAbdelmoghit IdhsaineОценок пока нет
- Cours MOCN - IIT 2023 CH2 27-2-2023Документ11 страницCours MOCN - IIT 2023 CH2 27-2-2023benchikh lindaОценок пока нет
- Chapitre 3 Fabrication Assistée Par Ordinateur 3 - Code GДокумент49 страницChapitre 3 Fabrication Assistée Par Ordinateur 3 - Code GAs ScofОценок пока нет
- TD 30 - Représentation D'une Fonction Logique PDFДокумент4 страницыTD 30 - Représentation D'une Fonction Logique PDFbhs channelОценок пока нет
- Travail Demandé Sur La Mise en Position IsostatiqueДокумент8 страницTravail Demandé Sur La Mise en Position IsostatiqueAbdoulaye DIALLOОценок пока нет
- Corrigé Mécanique T1 GP1 2021Документ6 страницCorrigé Mécanique T1 GP1 2021kara baОценок пока нет
- Statique 3D 477704 - 4167Документ4 страницыStatique 3D 477704 - 4167xevniОценок пока нет
- TournageДокумент27 страницTournageRazan KhОценок пока нет
- Bureau Des Méthodes Gam Capot PliageДокумент1 страницаBureau Des Méthodes Gam Capot Pliagematrani100% (1)
- TP10 Meca3D Scie SauteuseДокумент3 страницыTP10 Meca3D Scie SauteuseC'est Yana100% (1)
- Transmissions de Puissance PDFДокумент6 страницTransmissions de Puissance PDFKhaled SouaissaОценок пока нет
- Méthode Ch2Документ17 страницMéthode Ch2Fedi Ben AliОценок пока нет
- Rattrapage Corrigé 2012 PDFДокумент7 страницRattrapage Corrigé 2012 PDFGuiliassОценок пока нет
- PMOCN Doc ÉleveДокумент16 страницPMOCN Doc Élevedayzen jiffОценок пока нет
- Chap Ii - Isostatisme - 2023 PDFДокумент13 страницChap Ii - Isostatisme - 2023 PDFDelano TamkoОценок пока нет
- 3202540912-U41 PDFДокумент13 страниц3202540912-U41 PDFChokri AtefОценок пока нет
- FiletageДокумент5 страницFiletageKouam kamguaingОценок пока нет
- La Liaison Glissiere (Diapos)Документ14 страницLa Liaison Glissiere (Diapos)mehdiОценок пока нет
- Examen A05 SolutionДокумент7 страницExamen A05 SolutionAbdallah SbaghdiОценок пока нет
- الهندسة الكهربائية 3نشاطДокумент110 страницالهندسة الكهربائية 3نشاطadel imessОценок пока нет
- Méthodes de FabricationДокумент19 страницMéthodes de FabricationFedi Ben Ali100% (1)
- Examen 2013 Correction PDFДокумент10 страницExamen 2013 Correction PDFNassim RabaouiОценок пока нет
- La Fraiseuse Universelle 10N GambinДокумент6 страницLa Fraiseuse Universelle 10N GambinBechir Hamdi0% (1)
- Mortaiseuse PDFДокумент4 страницыMortaiseuse PDFOTHMAN MCHACHTIОценок пока нет
- Duree Vie Outil EleveДокумент4 страницыDuree Vie Outil Elevesaber100% (1)
- Exercices Des Trains EpicycloidauxДокумент3 страницыExercices Des Trains Epicycloidauxmohamedaloui294Оценок пока нет
- Partie 1Документ4 страницыPartie 1Amal Hammami Ep SghaierОценок пока нет
- Correction EX3Документ14 страницCorrection EX3Nizar FerjaouiОценок пока нет
- Gamme - Usinage - 2010 (6dia - Page)Документ6 страницGamme - Usinage - 2010 (6dia - Page)c oussama100% (1)
- tp4 Fraisage Avec Plateau DiviseurДокумент6 страницtp4 Fraisage Avec Plateau Diviseurۥٰ ۥٰ ۥٰ ۥٰОценок пока нет
- WINCAM 3 CFAO - درس محاكاة الصنع للسنة الثالثة ثانوي هندسة ميكانيكية بواسطة برنامج PDFДокумент14 страницWINCAM 3 CFAO - درس محاكاة الصنع للسنة الثالثة ثانوي هندسة ميكانيكية بواسطة برنامج PDFAlix BoubanОценок пока нет
- Chapitre 1Документ14 страницChapitre 1SLIMANE BENCHIHEUBОценок пока нет
- Geometrie de Outil de CoupeДокумент19 страницGeometrie de Outil de CoupeAbdelmoghit IdhsaineОценок пока нет
- TP TournageДокумент6 страницTP Tournagesoulaima khederОценок пока нет
- Limer PDFДокумент3 страницыLimer PDFMamou DeflaouiОценок пока нет
- ISOSTATISMEДокумент6 страницISOSTATISMESam DallaliОценок пока нет
- ISOSTATISMEДокумент6 страницISOSTATISMEmaraghni_hassine7592Оценок пока нет
- Déplacement Linéaire Soit: Étude Des Mouvements 1. Dans Un PLANДокумент9 страницDéplacement Linéaire Soit: Étude Des Mouvements 1. Dans Un PLANYoussef NajihОценок пока нет
- ISOSTATISMEДокумент6 страницISOSTATISMEMaha KarrayОценок пока нет
- TD 20S C3 A9rie 20no 203Документ1 страницаTD 20S C3 A9rie 20no 203maraghni_hassine7592Оценок пока нет
- TD 20serie 20no 204Документ1 страницаTD 20serie 20no 204maraghni_hassine7592Оценок пока нет
- Caract C3 A9ristiques 20g C3 A9om C3 A9triquesДокумент7 страницCaract C3 A9ristiques 20g C3 A9om C3 A9triquesmaraghni_hassine7592Оценок пока нет
- Usinage Par Enlevement de MatiereДокумент8 страницUsinage Par Enlevement de Matieremaraghni_hassine7592Оценок пока нет
- BPT 2004 ConcoursДокумент40 страницBPT 2004 Concoursmaraghni_hassine7592Оценок пока нет
- Cours 00-Analyse FonctionnelleДокумент14 страницCours 00-Analyse Fonctionnellemaraghni_hassine7592Оценок пока нет
- Exam Materaux PDFДокумент19 страницExam Materaux PDFmaraghni_hassine7592Оценок пока нет
- Analyse de Fabrication Et Gammes D'usinage-partie3-Fm-tsmfmДокумент47 страницAnalyse de Fabrication Et Gammes D'usinage-partie3-Fm-tsmfmmaraghni_hassine7592100% (1)
- Exercices IsostatismeДокумент2 страницыExercices Isostatismemaraghni_hassine759288% (24)
- Tp1 Fao FraisageДокумент32 страницыTp1 Fao Fraisagemaraghni_hassine7592Оценок пока нет
- 311-1 Usinage de PLEXIGLAS® - FRДокумент24 страницы311-1 Usinage de PLEXIGLAS® - FRmaraghni_hassine7592Оценок пока нет
- Filtre À HuileДокумент13 страницFiltre À Huilemaraghni_hassine7592Оценок пока нет
- Fiches Produits - Aciers Laminés À Froid FRДокумент4 страницыFiches Produits - Aciers Laminés À Froid FRmaraghni_hassine7592Оценок пока нет
- 694 11 Efforts de Coupe Et puissances%5B1%5D PDFДокумент10 страниц694 11 Efforts de Coupe Et puissances%5B1%5D PDFpaul3012Оценок пока нет
- Corrosion Protection PDFДокумент5 страницCorrosion Protection PDFmaraghni_hassine7592Оценок пока нет
- DR Aluminium Cuivre PDFДокумент6 страницDR Aluminium Cuivre PDFmaraghni_hassine7592Оценок пока нет
- Assemblages Par Elements FiletesДокумент14 страницAssemblages Par Elements Filetesmaraghni_hassine7592Оценок пока нет
- Moyens de Protection Contre La CorrosionДокумент3 страницыMoyens de Protection Contre La Corrosionmaraghni_hassine7592Оценок пока нет
- Cinématique Du SolideДокумент20 страницCinématique Du Solidemaraghni_hassine7592100% (1)
- Definition Point Générateur PDFДокумент4 страницыDefinition Point Générateur PDFmaraghni_hassine7592Оценок пока нет
- Cinématique PpsДокумент8 страницCinématique Ppsmaraghni_hassine7592Оценок пока нет
- Cotation Iso ReferenceДокумент25 страницCotation Iso Referencemaraghni_hassine7592Оценок пока нет
- CIPS La Psychosomatique RelationnelleДокумент135 страницCIPS La Psychosomatique RelationnelleFredy ricardo100% (1)
- Les Transfert Thermiques 2014 EXERCICE 1 2 3 4Документ1 страницаLes Transfert Thermiques 2014 EXERCICE 1 2 3 4Ben SafiОценок пока нет
- Permaculture 10 PrincipesДокумент1 страницаPermaculture 10 Principeswenrolland100% (2)
- Rapport Sur La Francophonie 2019-2022Документ48 страницRapport Sur La Francophonie 2019-2022azad halifaОценок пока нет
- Mignenan Uqac 0862D 10560 PDFДокумент345 страницMignenan Uqac 0862D 10560 PDFYoussefОценок пока нет
- CORRIGÉ SERIE 1 Analyse MathДокумент11 страницCORRIGÉ SERIE 1 Analyse MathBouchra BouchraОценок пока нет
- Esprit de Rivarol Rivarol Antoine Bpt6k75225hДокумент306 страницEsprit de Rivarol Rivarol Antoine Bpt6k75225hAlexChiusdayОценок пока нет
- Dossier 1 Benchmark IntroductionДокумент98 страницDossier 1 Benchmark Introductiona.rharrabОценок пока нет
- Exposé de Mémoire de StageДокумент40 страницExposé de Mémoire de StageAmmar SassiОценок пока нет
- Petrographie CourДокумент4 страницыPetrographie Courabdou100% (1)
- TEC NotesДокумент6 страницTEC Noteszakariae harime100% (1)
- Corriges - Eval C1Документ19 страницCorriges - Eval C1Charly WheelОценок пока нет
- Thse Alexandre Deydier PDFДокумент242 страницыThse Alexandre Deydier PDFeliasОценок пока нет
- Villeneuve Jean-Philippe 2008 TheseДокумент215 страницVilleneuve Jean-Philippe 2008 Thesemariama niasseОценок пока нет
- Cours de Mecanique Des Sols Et ExercisesДокумент285 страницCours de Mecanique Des Sols Et Exerciseslimmoud100% (1)
- QQOQCPДокумент1 страницаQQOQCPGILAR AntoОценок пока нет
- Université Lyon 2 - Master 1 Langues Étrangères AppliquéesДокумент2 страницыUniversité Lyon 2 - Master 1 Langues Étrangères AppliquéesKarim DzОценок пока нет
- CV Hicham ELRASAFI Ingenieur DEtat en Procedes Industriel Et EnvironnementДокумент1 страницаCV Hicham ELRASAFI Ingenieur DEtat en Procedes Industriel Et EnvironnementelrasafiОценок пока нет
- API1Документ87 страницAPI1صحوة آدميОценок пока нет
- 1860 DR Auguste Maladies MentalesДокумент895 страниц1860 DR Auguste Maladies MentalesJo HGОценок пока нет
- Assemblée Du Bon Usage Des PsychotropesДокумент500 страницAssemblée Du Bon Usage Des PsychotropesGross Jean-FélixОценок пока нет
- Dossier de Présentation Biojest ProДокумент19 страницDossier de Présentation Biojest ProKF2B_EnvironnementОценок пока нет
- Rodrigo - La SiglaisonДокумент10 страницRodrigo - La SiglaisonlordmikauОценок пока нет
- Math KiwiДокумент16 страницMath Kiwiibnmessaoud10Оценок пока нет
- 2AS Lph-COM2-21Документ2 страницы2AS Lph-COM2-21Jsjjs Dkkdkd100% (1)
- Chapitre I Microprocesseur 6809 GSEA12013 PDFДокумент56 страницChapitre I Microprocesseur 6809 GSEA12013 PDFRyan Hj100% (1)
- G3 La Population Mondiale SsДокумент4 страницыG3 La Population Mondiale SsOthmanОценок пока нет