Вам также может понравиться
- Cap 2 RefrigerantesДокумент9 страницCap 2 RefrigerantesRonald De la CruzОценок пока нет
- Marco TeóricoДокумент21 страницаMarco TeóricoRonald De la Cruz100% (1)
- Contaminacion MonzonДокумент31 страницаContaminacion MonzonRonald De la CruzОценок пока нет
- Monografia MN 253Документ62 страницыMonografia MN 253Ronald De la CruzОценок пока нет
- Controles Electricos y Automatizacion (Monografia)Документ15 страницControles Electricos y Automatizacion (Monografia)Ronald De la CruzОценок пока нет
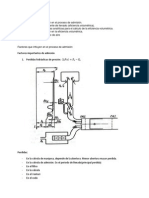
- Proceso de AdmisiónДокумент11 страницProceso de AdmisiónRonald De la CruzОценок пока нет
- Informe N 002 2013 Cegm Cofopri AДокумент8 страницInforme N 002 2013 Cegm Cofopri ARonald De la CruzОценок пока нет
- Informe 2Документ39 страницInforme 2Ronald De la CruzОценок пока нет
- BetoДокумент4 страницыBetoRonald De la CruzОценок пока нет
- Bomba de Inyeccion DieselДокумент32 страницыBomba de Inyeccion DieselRonald De la CruzОценок пока нет
- Canibal de RotemburgoДокумент1 страницаCanibal de RotemburgoRonald De la CruzОценок пока нет
- Informe de La Industria Del PlasticoДокумент11 страницInforme de La Industria Del PlasticoRonald De la CruzОценок пока нет
- Silabo ML 830 Nuevo-Fim - UniДокумент4 страницыSilabo ML 830 Nuevo-Fim - UnianajulcaОценок пока нет
- Instrucciones de RecargaДокумент4 страницыInstrucciones de Recargadexter128x100% (1)
- Presentación Martillo Hidraulico BARRICK - LAGUNAS NORTEДокумент21 страницаPresentación Martillo Hidraulico BARRICK - LAGUNAS NORTEVíctor Hugo Moreno SánchezОценок пока нет
- Determinación Del Contenido Total de HumedadДокумент10 страницDeterminación Del Contenido Total de HumedadCarlos Patiño100% (1)
- CPM Pert2Документ2 страницыCPM Pert2JANA חאנה MENDOZA GONZALEZОценок пока нет
- INTE 21-01-02-96 Mantenimiento ExtintoresДокумент16 страницINTE 21-01-02-96 Mantenimiento ExtintoresstephanieОценок пока нет
- Memoria EscalerasДокумент4 страницыMemoria EscalerasBertha AlejandraОценок пока нет
- Guía de Laboratorio Redes Opticas 02Документ9 страницGuía de Laboratorio Redes Opticas 02MAX FREDI QUISPE AGUILARОценок пока нет
- Informe de Resultado de Ensayo Resistencia A La Flexión Del Concreto Usando Una Viga Simplemente Apoyada Y Cargada en Los Tercios de La Luz LibreДокумент1 страницаInforme de Resultado de Ensayo Resistencia A La Flexión Del Concreto Usando Una Viga Simplemente Apoyada Y Cargada en Los Tercios de La Luz LibreOscar Rivera CantorОценок пока нет
- Informe Mtto JunioДокумент5 страницInforme Mtto JunioAlejo RoseroОценок пока нет
- Maquina de Corriente Continua Como Motor en DerivaciónДокумент5 страницMaquina de Corriente Continua Como Motor en DerivaciónWilson Francisco BritoОценок пока нет
- Ensayo AhuellamientoДокумент2 страницыEnsayo AhuellamientoDamian TerrazaОценок пока нет
- 01 I3.1 Aplicaciones Topograficas OPERACIONДокумент22 страницы01 I3.1 Aplicaciones Topograficas OPERACIONtopotecnicaОценок пока нет
- Capitulo 2 Proceso de Planeacion EstrategicaДокумент11 страницCapitulo 2 Proceso de Planeacion EstrategicaDaniel Ivan PardoОценок пока нет
- Normalizacion c6...Документ2 страницыNormalizacion c6...Brayan BeltranОценок пока нет
- Rne IlustradoДокумент57 страницRne IlustradoJessenia Leiva ObregonОценок пока нет
- Anexo A LPN 003 TribunalДокумент18 страницAnexo A LPN 003 TribunalGona Navas ArqОценок пока нет
- Diseño de Cuadro Greco-LatinoДокумент6 страницDiseño de Cuadro Greco-LatinoShanel Lamar0% (1)
- Plan de Desarrollo Unificado de CotaДокумент102 страницыPlan de Desarrollo Unificado de CotaPhilip AndersonОценок пока нет
- ESTRUCTURAL 3pdfДокумент1 страницаESTRUCTURAL 3pdfYeris Alexander Abadia MendezОценок пока нет
- Seccion 060 - Puesta A Tierra y Enlace EquipotencialДокумент38 страницSeccion 060 - Puesta A Tierra y Enlace EquipotencialRoxana Karin Llontop CaicedoОценок пока нет
- Tesis de AntiplanoДокумент188 страницTesis de AntiplanoIvan Ccanto Condori100% (1)
- Diagrama de Flujos 1Документ7 страницDiagrama de Flujos 1MEGA FLASHОценок пока нет
- Memoria Serpentine Tower Yanna DumitДокумент21 страницаMemoria Serpentine Tower Yanna DumitYanna DumitОценок пока нет
- Hino FC9JДокумент6 страницHino FC9JCarlos Arturo AcevedoОценок пока нет
- Como Burlar El Bloqueo CantvДокумент15 страницComo Burlar El Bloqueo Cantvdrw_21Оценок пока нет
- Planos de Centro de Salud Nivel I-4-Layout1Документ1 страницаPlanos de Centro de Salud Nivel I-4-Layout1dani_17d0% (3)
- Primer Examen Parcial de Poo 2022Документ2 страницыPrimer Examen Parcial de Poo 2022Benjamin LopezОценок пока нет
- Buyer Persona Elegante y Divertido Marrón y Azul - BrainstormДокумент1 страницаBuyer Persona Elegante y Divertido Marrón y Azul - BrainstormSusana PerezОценок пока нет
- Empiezan A Perforar Pozos en Incahuasi y MargaritaДокумент2 страницыEmpiezan A Perforar Pozos en Incahuasi y MargaritaRuben Waldir Segarra MoralesОценок пока нет
- Juntas EmpernadasДокумент5 страницJuntas EmpernadasWendy MontoyaОценок пока нет