Вам также может понравиться
- 01 - Ejemplos IndustrialesДокумент35 страниц01 - Ejemplos IndustrialesAníbal ZaniniОценок пока нет
- BALANZA SYSTEL CARPETA TÉCNICA PRON I V2 Rev03Документ33 страницыBALANZA SYSTEL CARPETA TÉCNICA PRON I V2 Rev03agusamado7Оценок пока нет
- Hoja de Fabricacion Proyecto Platina 2022 - Planeación - FabricaciónДокумент26 страницHoja de Fabricacion Proyecto Platina 2022 - Planeación - FabricaciónJESSIKA LISBETH PENALOZA CASTILLOОценок пока нет
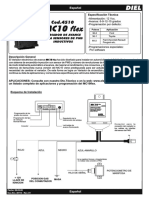
- 4510 PDFДокумент2 страницы4510 PDFRoberto D MartínezОценок пока нет
- Lista de señales PLC-RTU para actualización de sistema de control y seguridad de estación de compresión VillamontesДокумент5 страницLista de señales PLC-RTU para actualización de sistema de control y seguridad de estación de compresión VillamontesErwin RojasОценок пока нет
- Arquitectura integración sistema HVACДокумент2 страницыArquitectura integración sistema HVACArte LaboyanoОценок пока нет
- Sesion 00 Introduccion Sistemas AutomatizadosДокумент21 страницаSesion 00 Introduccion Sistemas Automatizadosjose carlos Caceres PacsiОценок пока нет
- Check List DataCenterДокумент35 страницCheck List DataCenteradmin alfrescoОценок пока нет
- Sigma Manual - EspДокумент17 страницSigma Manual - EspFelipe Raul Chumpitaz Guevara100% (1)
- para Camion GLP PDFДокумент21 страницаpara Camion GLP PDFHector Balvin HuaringaОценок пока нет
- Sistema de control distribuido para ascensores SigmaДокумент17 страницSistema de control distribuido para ascensores Sigmaangela1590100% (1)
- LS10 LigasureДокумент1 страницаLS10 LigasureBiomédica Hospital San JoséОценок пока нет
- Mazda Transmision SensoresДокумент2 страницыMazda Transmision SensoresSermacat SerteccasОценок пока нет
- Auditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 2Документ10 страницAuditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 2leoОценок пока нет
- MNT ES 01 R0 Numeración Documentos MantenimientoДокумент2 страницыMNT ES 01 R0 Numeración Documentos MantenimientoElvis FernandezОценок пока нет
- Auditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 1Документ15 страницAuditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 1leoОценок пока нет
- Manual ID 20 Resumido Pregunta Nº 18Документ20 страницManual ID 20 Resumido Pregunta Nº 18Mario Mota MarshmallowsОценок пока нет
- Auditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 3Документ13 страницAuditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 3leoОценок пока нет
- D1261-03 (Es - Web)Документ33 страницыD1261-03 (Es - Web)Danny PuchaОценок пока нет
- 2.-Calculo de Linea de Conducción San JoseДокумент2 страницы2.-Calculo de Linea de Conducción San JoseWilson Torres TorresОценок пока нет
- Boleta Ricoh F - ELSEДокумент1 страницаBoleta Ricoh F - ELSEJacqueline CarrionОценок пока нет
- Lista de Verificacion Lazos SDMC PE-LIT-A Rev. 1Документ1 страницаLista de Verificacion Lazos SDMC PE-LIT-A Rev. 1Santiago PestañaОценок пока нет
- Transmisores Inteligentes MinaДокумент67 страницTransmisores Inteligentes MinaJose Vazquez Xolo100% (5)
- Formato de Solicitud de Asignacion de Activo TecnologicoДокумент7 страницFormato de Solicitud de Asignacion de Activo TecnologicoLore NaОценок пока нет
- Auditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 6Документ13 страницAuditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 6leoОценок пока нет
- FORMATO DE EVENTOS ITSДокумент2 страницыFORMATO DE EVENTOS ITSDANNA JULIETH RINCON ALARCONОценок пока нет
- Auditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 4Документ13 страницAuditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 4leoОценок пока нет
- César Niño Actividad 7.2 2do. Corte PPEMДокумент28 страницCésar Niño Actividad 7.2 2do. Corte PPEMCesar NiñoОценок пока нет
- Copia de Los Símbolos SAMAДокумент4 страницыCopia de Los Símbolos SAMAYudixa ChiОценок пока нет
- Catalogo CaudalimetroДокумент8 страницCatalogo CaudalimetroFabian W KrugerОценок пока нет
- Auditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 5Документ13 страницAuditoria Tecnica Servicio Tipo Pajaritos #3195 Asc 5leoОценок пока нет
- Principios Conduccion PanelsДокумент32 страницыPrincipios Conduccion Panelsleonardo_arriagaОценок пока нет
- ABB - Gestión de TransformadoresДокумент24 страницыABB - Gestión de TransformadoresJ PizarroОценок пока нет
- Catalgo de Surtidores HidrocarbuosДокумент48 страницCatalgo de Surtidores HidrocarbuosDaniel Morales Ruesta100% (1)
- Transmisores InteligentesДокумент59 страницTransmisores InteligentesAndresFelipeCastroDiazОценок пока нет
- Pa-Sig-Im-05 Programa de Capacitacion Por PuestoДокумент1 страницаPa-Sig-Im-05 Programa de Capacitacion Por PuestoGerardo GrazaОценок пока нет
- La CurvaДокумент1 страницаLa CurvaDaniel Pocohuanca DiazОценок пока нет
- PLC I - S7 1200 - 1214C - 2017pub06 PDFДокумент25 страницPLC I - S7 1200 - 1214C - 2017pub06 PDFJuan Leyva Gomez100% (1)
- Automatización Industrial: Control y evoluciónДокумент21 страницаAutomatización Industrial: Control y evolucióngpowerpОценок пока нет
- Informe Técnico 15 Dic 2020Документ14 страницInforme Técnico 15 Dic 2020rene almonacidОценок пока нет
- I-04 CanalizacionesДокумент1 страницаI-04 CanalizacionesArmin CaniulaoОценок пока нет
- MonitoreoTransformadoresДокумент10 страницMonitoreoTransformadoresJuan ChingaОценок пока нет
- Somachine Basic Manual 3 PracticaДокумент16 страницSomachine Basic Manual 3 PracticaGuillermoAlejandroCajal100% (1)
- Iesa For Medpt 01 01Документ2 страницыIesa For Medpt 01 01harcksitoОценок пока нет
- Actividad N°3Документ26 страницActividad N°3Felipe Ortiz DiazОценок пока нет
- Gestión inteligente del aire comprimido con SIGMA AIR MANAGER 4.0Документ11 страницGestión inteligente del aire comprimido con SIGMA AIR MANAGER 4.0Jeronimo JeronimoОценок пока нет
- Esquema Electrico SumoДокумент1 страницаEsquema Electrico SumoFrancisco ContrerasОценок пока нет
- TDT 1Документ4 страницыTDT 1promaecetprosoportefinalОценок пока нет
- 3calibración TRANS NIVELДокумент2 страницы3calibración TRANS NIVELMartha BallesterosОценок пока нет
- Control de ProcesosДокумент41 страницаControl de ProcesosOmar Macalupu BlasОценок пока нет
- Manual Alarma B11Документ30 страницManual Alarma B11kielОценок пока нет
- 1 PC.4.1-0 Informe de Intervención ES FormДокумент2 страницы1 PC.4.1-0 Informe de Intervención ES FormWilly HerОценок пока нет
- Mantenimiento y reparación de instalaciones de telefonía y comunicación. ELES0108От EverandMantenimiento y reparación de instalaciones de telefonía y comunicación. ELES0108Оценок пока нет
- Operaciones auxiliares de montaje de componentes informáticos. 2ª edición (MF1207_1): HARDWARE (O SOPORTE FÍSICO DEL ORDENADOR)От EverandOperaciones auxiliares de montaje de componentes informáticos. 2ª edición (MF1207_1): HARDWARE (O SOPORTE FÍSICO DEL ORDENADOR)Оценок пока нет
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311От EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Рейтинг: 4.5 из 5 звезд4.5/5 (2)
- Mantenimiento del subsistema lógico de sistemas informáticosОт EverandMantenimiento del subsistema lógico de sistemas informáticosОценок пока нет
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109От EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Оценок пока нет
- Preparación y regulación de los sistemas de alimentación en máquinas de impresión offset. ARGI0109От EverandPreparación y regulación de los sistemas de alimentación en máquinas de impresión offset. ARGI0109Оценок пока нет
- Ferro Cian UroДокумент5 страницFerro Cian UroMauricioReyesОценок пока нет
- Entregble TR2 BasicaДокумент5 страницEntregble TR2 BasicaLeesli CáceresОценок пока нет
- Rec Constr Anual (CA)Документ11 страницRec Constr Anual (CA)jose26orozcoОценок пока нет
- Proteinas Portadoras de OxígenoДокумент3 страницыProteinas Portadoras de OxígenoAkimitaОценок пока нет
- Estado Del ArteДокумент3 страницыEstado Del ArteDanna Jiménez MaldonadoОценок пока нет
- Presentacion Carburadores de Mecanica VirtualДокумент32 страницыPresentacion Carburadores de Mecanica VirtualPurificación Polentino ManjarresОценок пока нет
- Qué Nos Dice El Índice de RefracciónДокумент6 страницQué Nos Dice El Índice de RefracciónAndresFelipeOteroJimenezОценок пока нет
- Tierras RarasДокумент18 страницTierras RarastitoОценок пока нет
- Art. Termocrómico PDFДокумент6 страницArt. Termocrómico PDFRODRIGUEZ ANGELОценок пока нет
- Medir potencia trifásica con vatímetrosДокумент15 страницMedir potencia trifásica con vatímetrosKlever YanchaguanoОценок пока нет
- TumbadenДокумент86 страницTumbadenMariaKeylaGoicocheaAguilarОценок пока нет
- Gestion Ambiental: DedicatoriaДокумент177 страницGestion Ambiental: DedicatoriastefhanyОценок пока нет
- Almacén de Repuestos ChevroletДокумент35 страницAlmacén de Repuestos ChevroletHEYОценок пока нет
- Los Diarios Perdidos de NikolaДокумент105 страницLos Diarios Perdidos de NikolaleonTJRОценок пока нет
- 3.2 Deber PDFДокумент3 страницы3.2 Deber PDFpablo imbaОценок пока нет
- Calor de fusión aguaДокумент7 страницCalor de fusión aguaWilssonRamirezОценок пока нет
- Ejemplo. Indice Dossier de CalidadДокумент2 страницыEjemplo. Indice Dossier de CalidadAbd El Latif ALFAYEDОценок пока нет
- Guía para La Fabricación de Un HumectadorДокумент7 страницGuía para La Fabricación de Un HumectadorFabián CaffaroОценок пока нет
- 2003.DS 027-VIV Reglamento de Acondicionamiento Territorial y Desarrollo UrbanoДокумент8 страниц2003.DS 027-VIV Reglamento de Acondicionamiento Territorial y Desarrollo UrbanoVictor TomastoОценок пока нет
- Intercambiador de Placas 2020Документ29 страницIntercambiador de Placas 2020Angelica MeraОценок пока нет
- Informe Molienda Granulometria..FinalДокумент12 страницInforme Molienda Granulometria..FinalSusan MolinaОценок пока нет
- Asignación de potencia compleja generadores-cargas usando teoría de juegosДокумент2 страницыAsignación de potencia compleja generadores-cargas usando teoría de juegosvilcapomaОценок пока нет
- Practica 2Документ11 страницPractica 2Ballesteros Vargas MerlynaОценок пока нет
- Aplicaciones NeumaticaДокумент8 страницAplicaciones NeumaticaAndres CaizaОценок пока нет
- Memcal SPT Py01 Palcasa PDFДокумент38 страницMemcal SPT Py01 Palcasa PDFEdwin SanchezОценок пока нет
- Electiva ValvulasДокумент31 страницаElectiva Valvulassantiago quispe mamaniОценок пока нет
- Práctica 2Документ7 страницPráctica 2Anonymous lYyjl1SQDОценок пока нет
- Plan de Emergencia en Defensa Civil ImtДокумент43 страницыPlan de Emergencia en Defensa Civil ImtBrayan Efrain Guevara CarranzaОценок пока нет
- 2.1 - Formato Modelo AIA RL Acercar V2Документ28 страниц2.1 - Formato Modelo AIA RL Acercar V2MUNDO LITOGRAFICO SASОценок пока нет
- Resistencia de Los Ladrillos PDFДокумент10 страницResistencia de Los Ladrillos PDFrdpc_10153639Оценок пока нет