Вам также может понравиться
- Structural Analysis and Design of A Warehouse BuildingДокумент93 страницыStructural Analysis and Design of A Warehouse BuildingAnonymous vofwBP2p5Оценок пока нет
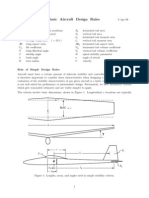
- Basic Aircraft Design RulesДокумент8 страницBasic Aircraft Design RulesAbdelrahman Nassif100% (1)
- Fluid Film Lubrication - Osborne Reynolds Centenary: FLUID FILM LUBRICATION - OSBORNE REYОт EverandFluid Film Lubrication - Osborne Reynolds Centenary: FLUID FILM LUBRICATION - OSBORNE REYОценок пока нет
- Background On Aircraft AerodynamicsДокумент8 страницBackground On Aircraft AerodynamicsAbdelrahman NassifОценок пока нет
- Acoustic Emission Source LocationДокумент176 страницAcoustic Emission Source LocationCarlos Quiterio Gomez Muñoz100% (2)
- Aerodynamics of Race Car Wings - A CFD StudyДокумент255 страницAerodynamics of Race Car Wings - A CFD StudyAshish Rejikumar100% (1)
- Structural Design&SafetyДокумент187 страницStructural Design&Safetydanishsarwat100% (4)
- Tek 14-07C11 PDFДокумент8 страницTek 14-07C11 PDFsaadyamin2821Оценок пока нет
- A New Approach To Ground Grids PDFДокумент180 страницA New Approach To Ground Grids PDFLaurence MichaelОценок пока нет
- Finite Element Analysis of A Buried PipelineДокумент199 страницFinite Element Analysis of A Buried Pipelinecoteesh100% (1)
- Flood and Drought Management BackupДокумент100 страницFlood and Drought Management Backupteklemariam0% (1)
- Exercise 1: Supremum Contained in The Set (Abbott Exercise 1.3.7)Документ7 страницExercise 1: Supremum Contained in The Set (Abbott Exercise 1.3.7)UnknownОценок пока нет
- Panouri SandwichДокумент279 страницPanouri SandwicharnautoiuОценок пока нет
- Oxygen Concentrators DesignДокумент248 страницOxygen Concentrators Designdesigns harsha100% (1)
- Lesson Plan - AmortizationДокумент4 страницыLesson Plan - Amortizationapi-327991016100% (1)
- History of MathematicsДокумент38 страницHistory of MathematicsSreekanth ReddyОценок пока нет
- T Distribution and Test of Hypothesis Part I STEMДокумент30 страницT Distribution and Test of Hypothesis Part I STEMnicole quilangОценок пока нет
- Aircraft Structure Vibration (Problem 11)Документ6 страницAircraft Structure Vibration (Problem 11)Abdelrahman NassifОценок пока нет
- Aircraft Structure Vibration.Документ4 страницыAircraft Structure Vibration.Abdelrahman NassifОценок пока нет
- Report Title Solution of Time Response Problem Using MATLABДокумент8 страницReport Title Solution of Time Response Problem Using MATLABAbdelrahman NassifОценок пока нет
- Sustainment of Commercial Aircraft Gas Turbine EnginesДокумент160 страницSustainment of Commercial Aircraft Gas Turbine EnginesSuresh Babu KsОценок пока нет
- 14343112Документ235 страниц14343112Aldi AdamОценок пока нет
- Turbofan Design For The Commercial AircraftДокумент98 страницTurbofan Design For The Commercial AircraftShezan KanjiyaniОценок пока нет
- Modelling of Installation Effect of Driven Piles by Hypoplasticity - Dung PDFДокумент109 страницModelling of Installation Effect of Driven Piles by Hypoplasticity - Dung PDFvilaneneОценок пока нет
- Flutter Analysis of Trainer Aircraft ModДокумент59 страницFlutter Analysis of Trainer Aircraft ModTheОценок пока нет
- Aeroelastic Analysis of Variable-Span Morphing WingsДокумент107 страницAeroelastic Analysis of Variable-Span Morphing WingsIsmailОценок пока нет
- 1 Sample Report LayoutДокумент21 страница1 Sample Report LayoutNikhil PatidarОценок пока нет
- Aeroelastic AnalysisДокумент108 страницAeroelastic AnalysisSunil Mike VictorОценок пока нет
- PHD - Aerodynamics of Flexible MembranesДокумент165 страницPHD - Aerodynamics of Flexible MembranesAndré VilanovaОценок пока нет
- Optimization of Wind Turbine Airfoils - Blades and Wind Farm LayoutДокумент184 страницыOptimization of Wind Turbine Airfoils - Blades and Wind Farm LayoutNilesh KumarОценок пока нет
- March, 2009Документ140 страницMarch, 2009Cabbar AdıgüzelОценок пока нет
- New Jersey Institute of Technology Reserves The Right To Distribute This Thesis or DissertationДокумент60 страницNew Jersey Institute of Technology Reserves The Right To Distribute This Thesis or DissertationSRI KRISHNA RОценок пока нет
- Full TextДокумент169 страницFull TextKaushal PatelОценок пока нет
- HASAN Syed Marzan Ul - Master Thesis - 7th Cohort - UROДокумент122 страницыHASAN Syed Marzan Ul - Master Thesis - 7th Cohort - UROjayОценок пока нет
- IIUM CanSat - CDRДокумент125 страницIIUM CanSat - CDRSyste DesigОценок пока нет
- Determination of Flutter Derivatives From Free Vibration Test ResultsДокумент107 страницDetermination of Flutter Derivatives From Free Vibration Test ResultsIsmailОценок пока нет
- Small StrainsДокумент70 страницSmall Strainskaiwen.arberОценок пока нет
- ISE color YUTOДокумент9 страницISE color YUTOyutoОценок пока нет
- Design and Fabrication of Vortex Tube Thesis BookДокумент40 страницDesign and Fabrication of Vortex Tube Thesis BookPankaj BhangareОценок пока нет
- Cad AnalysisДокумент10 страницCad AnalysisaunbhuttaОценок пока нет
- FT Classification Extractive and AdditiveДокумент101 страницаFT Classification Extractive and AdditiveAhmed BastawyОценок пока нет
- Ryerson University 3 DOF Longitudinal FLДокумент54 страницыRyerson University 3 DOF Longitudinal FLSreeja SunderОценок пока нет
- Master Thesis: Quality of Risk ReportingДокумент73 страницыMaster Thesis: Quality of Risk ReportingkmillatОценок пока нет
- Hossain Tonmoy B.sc. ThesisДокумент109 страницHossain Tonmoy B.sc. ThesisAsma ChikhaouiОценок пока нет
- ProceedingsДокумент111 страницProceedingsSalma SherbazОценок пока нет
- Helicopter Vibration Reduction Using Robust Control: Thomas MannchenДокумент133 страницыHelicopter Vibration Reduction Using Robust Control: Thomas Mannchen2dlmediaОценок пока нет
- 3-Sivalingam Koneshwaran ThesisДокумент189 страниц3-Sivalingam Koneshwaran ThesisAhmed ArafaОценок пока нет
- PHD. Thesis FormatДокумент16 страницPHD. Thesis FormatStark12345Оценок пока нет
- Ibrahim Hassanien Thesis - CFD Investigation of Smoke ManagementДокумент190 страницIbrahim Hassanien Thesis - CFD Investigation of Smoke Managementibrahimhh2Оценок пока нет
- Stiffness and Resistance of Base Plate To CHS Column With Axial Load and Bending MomentДокумент10 страницStiffness and Resistance of Base Plate To CHS Column With Axial Load and Bending MomentMohamed El Amin AICHOUCHEОценок пока нет
- Dynamic Analysis of Multiple Body Floating Platforms Coupled With Mooring Lines and ReisersДокумент223 страницыDynamic Analysis of Multiple Body Floating Platforms Coupled With Mooring Lines and ReisersYoungtae KimОценок пока нет
- Cha Jeesung J 200405 MsmeДокумент111 страницCha Jeesung J 200405 Msme111Neha SoniОценок пока нет
- Entropy, Complexity, Predictability, and Data Analysis of Time Series and Letter SequencesДокумент7 страницEntropy, Complexity, Predictability, and Data Analysis of Time Series and Letter SequencespasaitowОценок пока нет
- Abstract BookДокумент184 страницыAbstract BookgyirgaОценок пока нет
- BCD MultiplierLДокумент50 страницBCD MultiplierLVigneshInfotechОценок пока нет
- Final-2017-5-1-Zhuo LI-ThesisДокумент74 страницыFinal-2017-5-1-Zhuo LI-ThesisSUMITH K SОценок пока нет
- Akon Thesis PDFДокумент116 страницAkon Thesis PDFKant SantosОценок пока нет
- ALL Digital Phase Locked Loop (ADPLL) : July 2014Документ108 страницALL Digital Phase Locked Loop (ADPLL) : July 2014SAMОценок пока нет
- Structure Stability ProjectДокумент6 страницStructure Stability Project3ashourОценок пока нет
- Yousif Yassin PDFДокумент124 страницыYousif Yassin PDFJAVIYAROSОценок пока нет
- Colley Eamonn 2012 Analysis of Flow PDFДокумент60 страницColley Eamonn 2012 Analysis of Flow PDFArpit SahniОценок пока нет
- Acoustic and Elastic Multiple Scattering PDFДокумент250 страницAcoustic and Elastic Multiple Scattering PDFStan MariaОценок пока нет
- Nuclear Space Power and Propulsion SystemsДокумент304 страницыNuclear Space Power and Propulsion SystemsmkОценок пока нет
- Electron Capture: Theory and Practice in ChromatographyОт EverandElectron Capture: Theory and Practice in ChromatographyОценок пока нет
- Structure VibrationДокумент6 страницStructure VibrationAbdelrahman NassifОценок пока нет
- Aerodynamics Stability and ControlДокумент134 страницыAerodynamics Stability and ControlmordorceteОценок пока нет
- Aircraft Structure Vibration IIДокумент5 страницAircraft Structure Vibration IIAbdelrahman NassifОценок пока нет
- Lecture 3.1.4 AVL Search Trees, B, B Trees, Heap, Heap Sort.Документ47 страницLecture 3.1.4 AVL Search Trees, B, B Trees, Heap, Heap Sort.borab25865Оценок пока нет
- Coficients of Positive Moment For Continous BeamДокумент44 страницыCoficients of Positive Moment For Continous BeamCian ChanОценок пока нет
- Introduction To StatisticsДокумент21 страницаIntroduction To StatisticsKevin SayotoОценок пока нет
- Essay On Options Strategies For Financial TransactionsДокумент5 страницEssay On Options Strategies For Financial TransactionsKimkhorn LongОценок пока нет
- Expected Price Functionof Price SensitivityДокумент10 страницExpected Price Functionof Price SensitivityMr PoopОценок пока нет
- Geometry Packet Test ReviewДокумент19 страницGeometry Packet Test ReviewHassaan AliОценок пока нет
- Computing Point-to-Point Shortest Paths From External MemoryДокумент15 страницComputing Point-to-Point Shortest Paths From External MemoryJacco EerlandОценок пока нет
- LCS L2Документ12 страницLCS L2Mr. AK RajОценок пока нет
- Linear Programming (LP) : Deterministic Operations ResearchДокумент27 страницLinear Programming (LP) : Deterministic Operations ResearchAbenetОценок пока нет
- Event History Modeling A Guide For Social Scientists PDFДокумент2 страницыEvent History Modeling A Guide For Social Scientists PDFCassie0% (1)
- Astm D4065 20Документ5 страницAstm D4065 20Pulinda KasunОценок пока нет
- Ch3: Frequency Analysis For DT Signals: Questions To Be AnsweredДокумент31 страницаCh3: Frequency Analysis For DT Signals: Questions To Be AnsweredAnonymous T4YHyOFmОценок пока нет
- Ieee Risk AssessmentДокумент9 страницIeee Risk AssessmentEdgar ChecaОценок пока нет
- Week 1 AssignmentДокумент7 страницWeek 1 AssignmentJaime PalizardoОценок пока нет
- Representation of Sinusoidal Signal by A Phasor and Solution of Current in R-L-C Series CircuitsДокумент12 страницRepresentation of Sinusoidal Signal by A Phasor and Solution of Current in R-L-C Series CircuitsPrafull BОценок пока нет
- REPORTINGДокумент55 страницREPORTINGSabharish KoruturuОценок пока нет
- Incompressible Navier-Stokes RequirementsДокумент13 страницIncompressible Navier-Stokes Requirementsramy86Оценок пока нет
- TinkerPlots Help PDFДокумент104 страницыTinkerPlots Help PDFJames 23fОценок пока нет
- Digital Sat Math Test 2Документ11 страницDigital Sat Math Test 2nakrit thankanapongОценок пока нет
- Problem Set 3 in Pre CalДокумент1 страницаProblem Set 3 in Pre CalAnthony AbesadoОценок пока нет
- AMoS Module Wise Important Questions PDFДокумент4 страницыAMoS Module Wise Important Questions PDFDeepak GopalakrishnanОценок пока нет
- UT Dallas Syllabus For Opre6374.pjm.08s Taught by James Joiner (Jamesj)Документ15 страницUT Dallas Syllabus For Opre6374.pjm.08s Taught by James Joiner (Jamesj)UT Dallas Provost's Technology GroupОценок пока нет
- Real GasДокумент8 страницReal GasAmartya AnshumanОценок пока нет
- Mat150 Tutorial Sheet 3 - Quadratic EquationsДокумент2 страницыMat150 Tutorial Sheet 3 - Quadratic EquationsTeo PhiriОценок пока нет
- Present ValueДокумент11 страницPresent ValueJazine John AmbajanОценок пока нет