Вам также может понравиться
- Unit Iii: CPLD & Fpga Architecture & ApplicationsДокумент30 страницUnit Iii: CPLD & Fpga Architecture & ApplicationsNarasimha Murthy Yayavaram100% (7)
- Low Power Vlsi Question PaperДокумент2 страницыLow Power Vlsi Question Paperustadkrishna100% (3)
- UNIT-3 Gate Level Design NotesДокумент22 страницыUNIT-3 Gate Level Design NotesPallavi Ch100% (2)
- Verilog HDL Lab QuizДокумент69 страницVerilog HDL Lab Quizsrilakshmi0850% (2)
- EI2403 - VLSI Design 2 Marks With AnswersДокумент23 страницыEI2403 - VLSI Design 2 Marks With AnswersAnand GvphОценок пока нет
- EC8661 VLSI Design LaboratoryДокумент53 страницыEC8661 VLSI Design LaboratorySriram100% (4)
- ARM - PPT 8Документ74 страницыARM - PPT 8roysalways4u100% (1)
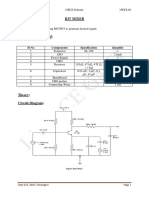
- 15ecl48-VTU-raghudathesh-BJT MIXER PDFДокумент2 страницы15ecl48-VTU-raghudathesh-BJT MIXER PDFraghudatheshgp100% (1)
- VLSI & ASIC Digital Design Interview QuestionsДокумент6 страницVLSI & ASIC Digital Design Interview QuestionsRupesh Kumar DuttaОценок пока нет
- CAD For VLSI Lecture Notes - Aravinda KoithyarДокумент116 страницCAD For VLSI Lecture Notes - Aravinda KoithyarAravinda Koithyar100% (3)
- VLSI Signal ProcessingДокумент19 страницVLSI Signal ProcessingSuriya SkariahОценок пока нет
- Verilog Lab ManualДокумент72 страницыVerilog Lab ManualAditya NarayanОценок пока нет
- Digital Electronics Interview Questions: 1) What Is The Difference Between Latch and Flip-Flop?Документ11 страницDigital Electronics Interview Questions: 1) What Is The Difference Between Latch and Flip-Flop?yashuОценок пока нет
- Mobile Computing Model Exam Question PapersДокумент3 страницыMobile Computing Model Exam Question PapersSamy KmОценок пока нет
- Dec Lab QuestionsДокумент25 страницDec Lab QuestionsPrathiksha Harish Medical Electronics EngineeringОценок пока нет
- Verilog Code For Code ConvertersДокумент5 страницVerilog Code For Code Convertersseeksudhanshu1100% (1)
- 15A04802-Low Power VLSI Circuits & Systems - Two Marks Q&A-5 UnitsДокумент31 страница15A04802-Low Power VLSI Circuits & Systems - Two Marks Q&A-5 UnitsPallavi Ch71% (7)
- Multiplier in Vlsi PDFДокумент23 страницыMultiplier in Vlsi PDFvmspraneeth100% (1)
- VLSI Module-1Документ119 страницVLSI Module-1Phanindra Reddy100% (2)
- UNIT - I CPLD & FPGA ArchitecturesДокумент22 страницыUNIT - I CPLD & FPGA Architecturesyayavaram100% (2)
- DSP Important Viva QuestionsДокумент3 страницыDSP Important Viva QuestionsDeepak Sahu100% (2)
- Low Voltage Low Power MemoriesДокумент21 страницаLow Voltage Low Power Memoriesanusha100% (1)
- Digital Electronics Lab Viva QuestionsДокумент2 страницыDigital Electronics Lab Viva Questionspramodrp200750% (8)
- Digital Design Lab Manual: Introduction To VerilogДокумент48 страницDigital Design Lab Manual: Introduction To VerilogKeith FernandesОценок пока нет
- VLSI Lab Manual PART-B, VTU 7th Sem KIT-TipturДокумент64 страницыVLSI Lab Manual PART-B, VTU 7th Sem KIT-Tipturpramodkumar_sОценок пока нет
- Low-Voltage Low-Power Adders: Unit-IvДокумент24 страницыLow-Voltage Low-Power Adders: Unit-Ivrakesh100% (3)
- Mes Question-BankДокумент4 страницыMes Question-BankGanaraj KaruvajeОценок пока нет
- VerilogДокумент5 страницVerilogChandru Ramaswamy100% (2)
- Unit 1 - ARM7, ARM9, ARM11 ProcessorsДокумент88 страницUnit 1 - ARM7, ARM9, ARM11 ProcessorsKunal Khandelwal50% (2)
- MIxed Signal Simulation Lab Manual I M.tech II SemДокумент150 страницMIxed Signal Simulation Lab Manual I M.tech II SemrppvchОценок пока нет
- Unit 7 Interfacing Memory and Parallel IO PeripheralsДокумент23 страницыUnit 7 Interfacing Memory and Parallel IO PeripheralsPreetham Saigal0% (1)
- Physics of Power Dissipation in CMOSДокумент24 страницыPhysics of Power Dissipation in CMOSMahendra Babu100% (1)
- 8086 Microprocessor MASM ProgramsДокумент9 страниц8086 Microprocessor MASM ProgramsSasi Bhushan100% (2)
- Cs9251 Mobile Computing Question BankДокумент16 страницCs9251 Mobile Computing Question BankNivithaОценок пока нет
- Questions and AnswersДокумент199 страницQuestions and AnswersRamesh100% (4)
- PIC QuestionsДокумент4 страницыPIC Questionsgopikrishnarao100% (1)
- This Set of VLSI Multiple Choice QuestionsДокумент20 страницThis Set of VLSI Multiple Choice QuestionsSujith Mrinal100% (3)
- AVR Microcontroller Question BankДокумент2 страницыAVR Microcontroller Question BankmadhurithkОценок пока нет
- EC1401 VLSI - Question Bank (N.shanmuga Sundaram)Документ35 страницEC1401 VLSI - Question Bank (N.shanmuga Sundaram)Dr. N.Shanmugasundaram50% (2)
- VLSI LAB MANUAL (18ECL77) - Analog dt14-01-2022Документ148 страницVLSI LAB MANUAL (18ECL77) - Analog dt14-01-2022Aamish PriyamОценок пока нет
- DSDV Lab Manual PDFДокумент15 страницDSDV Lab Manual PDFÅᴅᴀʀsʜ Rᴀᴍ100% (3)
- Project Report On Electronic Voting Machine Using Fpga VerilogДокумент23 страницыProject Report On Electronic Voting Machine Using Fpga Verilogteja72452Оценок пока нет
- Microprocessor and Microcontroller Anna University Question PapersДокумент3 страницыMicroprocessor and Microcontroller Anna University Question PapersthennishaОценок пока нет
- 18ecl66 - Embedded Systems LaboratoryДокумент33 страницы18ecl66 - Embedded Systems Laboratorytefflon trolegdy100% (1)
- Introduction To Tanner ToolДокумент8 страницIntroduction To Tanner Toolshantanudeka72% (18)
- LPC2148 DacДокумент14 страницLPC2148 DacSmruti Pore100% (1)
- Carry Select AdderДокумент72 страницыCarry Select Adderharshithakr100% (1)
- Question Bank Solutions (Module-2-IAT 1) - IOT - 15CS81Документ12 страницQuestion Bank Solutions (Module-2-IAT 1) - IOT - 15CS81Shobhit Kushwaha100% (1)
- Unit Ii: CPLD & Fpga Architecture & ApplicationsДокумент20 страницUnit Ii: CPLD & Fpga Architecture & ApplicationsNarasimha Murthy Yayavaram100% (1)
- Dr.Y.Narasimha Murthy. PH.DДокумент28 страницDr.Y.Narasimha Murthy. PH.DGoutham Devisetty100% (1)
- UNIT-I Digital System DesignДокумент28 страницUNIT-I Digital System DesignNarasimha Murthy YayavaramОценок пока нет
- Dice GameДокумент17 страницDice GameDuy Le100% (1)
- FSM ExamplesДокумент12 страницFSM ExamplesRanjith M KumarОценок пока нет
- 2 Chapter 12 Algorithmic State MachineДокумент16 страниц2 Chapter 12 Algorithmic State MachinekaosadОценок пока нет
- Lecture 9: Finite State Representation of Digital Circuits: DOC112: Computer Hardware Lecture 9 1Документ4 страницыLecture 9: Finite State Representation of Digital Circuits: DOC112: Computer Hardware Lecture 9 1Debashish PalОценок пока нет
- DLD Term ProjectДокумент10 страницDLD Term ProjectH052 Rajesh Komaravalli ECEОценок пока нет
- 2-Lecture Notes Lesson4 4Документ10 страниц2-Lecture Notes Lesson4 4kstu1112Оценок пока нет
- Algorithmic State Machine (ASM) : UnitДокумент10 страницAlgorithmic State Machine (ASM) : Unitateeq mughalОценок пока нет
- Deffects Textures LCДокумент480 страницDeffects Textures LCNarasimha Murthy YayavaramОценок пока нет
- UNIT II-Digital DesignДокумент14 страницUNIT II-Digital DesignNarasimha Murthy YayavaramОценок пока нет
- UNIT III-Digital System DesignДокумент13 страницUNIT III-Digital System DesignNarasimha Murthy YayavaramОценок пока нет
- UNIT-I Digital System DesignДокумент28 страницUNIT-I Digital System DesignNarasimha Murthy YayavaramОценок пока нет
- Mixed Signal Embedded ProgrammingДокумент268 страницMixed Signal Embedded ProgrammingPavan Kumar100% (14)
- Applications - Embedded SystemsДокумент25 страницApplications - Embedded SystemsNarasimha Murthy YayavaramОценок пока нет
- Data Communications - NotesДокумент26 страницData Communications - NotesNarasimha Murthy YayavaramОценок пока нет
- Unit Ii: CPLD & Fpga Architecture & ApplicationsДокумент20 страницUnit Ii: CPLD & Fpga Architecture & ApplicationsNarasimha Murthy Yayavaram100% (1)
- MOS and BiCMOS Circuit Design ProcessДокумент17 страницMOS and BiCMOS Circuit Design ProcessNarasimha Murthy YayavaramОценок пока нет
- Semi Custom Integrated Circuit DesignДокумент18 страницSemi Custom Integrated Circuit DesignNarasimha Murthy YayavaramОценок пока нет
- Introduction To MSP430 MicrocontrollersДокумент70 страницIntroduction To MSP430 MicrocontrollersNarasimha Murthy YayavaramОценок пока нет
- Unit-I: CPLD & Fpga Architectures & ApplicationsДокумент22 страницыUnit-I: CPLD & Fpga Architectures & ApplicationsNarasimha Murthy Yayavaram100% (5)
- Introduction To VLSI TechnologyДокумент32 страницыIntroduction To VLSI TechnologyNarasimha Murthy YayavaramОценок пока нет
- Arm 7 ArchitectureДокумент22 страницыArm 7 ArchitectureNarasimha Murthy YayavaramОценок пока нет
- Fiber Optic CommunicationsДокумент23 страницыFiber Optic CommunicationsNarasimha Murthy YayavaramОценок пока нет
- Sensors Interfacing TechniquesДокумент16 страницSensors Interfacing TechniquesRaja VenkateshОценок пока нет
- Pic Microcontroller - Class NotesДокумент26 страницPic Microcontroller - Class NotesNarasimha Murthy Yayavaram80% (25)
- Introduction To VHDL ProgrammingДокумент68 страницIntroduction To VHDL ProgrammingNarasimha Murthy YayavaramОценок пока нет
- Basics of Peripheral Devices and WorkingДокумент33 страницыBasics of Peripheral Devices and WorkingNarasimha Murthy Yayavaram100% (1)
- Recent Advances in ElectronicsДокумент73 страницыRecent Advances in ElectronicsNarasimha Murthy YayavaramОценок пока нет
- Power Supplies & RegulatorsДокумент15 страницPower Supplies & RegulatorsNarasimha Murthy YayavaramОценок пока нет
- Introduction To MasmДокумент13 страницIntroduction To MasmNarasimha Murthy Yayavaram100% (2)
- Control Systems - NotesДокумент61 страницаControl Systems - NotesNarasimha Murthy YayavaramОценок пока нет
- Introduction To ASICsДокумент53 страницыIntroduction To ASICsNarasimha Murthy YayavaramОценок пока нет
- Embedded Systems-UnitIДокумент33 страницыEmbedded Systems-UnitINarasimha Murthy YayavaramОценок пока нет
- Introduction To 68HC11 MICROCONTROLLERДокумент72 страницыIntroduction To 68HC11 MICROCONTROLLERNarasimha Murthy Yayavaram100% (3)
- 8096 Microcontrollers NotesДокумент9 страниц8096 Microcontrollers NotesNarasimha Murthy YayavaramОценок пока нет
- 8096 MicrocontrollerДокумент51 страница8096 MicrocontrollerNarasimha Murthy Yayavaram67% (3)
- Relay Selection Guide A1 enДокумент26 страницRelay Selection Guide A1 enAdamian InakeaОценок пока нет
- Features: TL494 Pulse-Width-Modulation Control CircuitsДокумент19 страницFeatures: TL494 Pulse-Width-Modulation Control CircuitsEdgarAlonsoОценок пока нет
- Published by DB 0 946 Service Audio Printed in The Netherlands Subject To ModificationДокумент34 страницыPublished by DB 0 946 Service Audio Printed in The Netherlands Subject To ModificationCarmine Del PreteОценок пока нет
- Chapter 6 LogicДокумент49 страницChapter 6 LogicProspect Teaches MathematicsОценок пока нет
- Rom TELE-audiovision 1309Документ260 страницRom TELE-audiovision 1309Alexander WieseОценок пока нет
- Smallest Radio Circuit Using Two Transistors - Engineering Projects12Документ4 страницыSmallest Radio Circuit Using Two Transistors - Engineering Projects12max_orwellОценок пока нет
- Antenna Group OE-254/GRC (NSN 5985-01-063-1574) : Operator'S, Organizational, and Direct Support Maintenance ManualДокумент80 страницAntenna Group OE-254/GRC (NSN 5985-01-063-1574) : Operator'S, Organizational, and Direct Support Maintenance ManualesubalewОценок пока нет
- Experiment 6 Implementation of LP Fir Filter For A Given SequenceДокумент25 страницExperiment 6 Implementation of LP Fir Filter For A Given SequenceSrinivas SamalОценок пока нет
- Sound System EqualizationДокумент17 страницSound System EqualizationEspartaco ValdezОценок пока нет
- Ilox Epu-1500 ManualДокумент1 страницаIlox Epu-1500 ManualMar Val Ionita100% (1)
- Ada 6.1 & Ampx4: Ada 6.1 Surround Processor & 4 Channel Power Amplifier Operations & Installation ManualДокумент19 страницAda 6.1 & Ampx4: Ada 6.1 Surround Processor & 4 Channel Power Amplifier Operations & Installation ManualCesar Eddy Diaz HernandezОценок пока нет
- Local Control Unit - DCSДокумент44 страницыLocal Control Unit - DCSAmit Kumar Shukla80% (5)
- FINAL-GROUP-5 Transistors BJT Oct 14asdsdasdДокумент27 страницFINAL-GROUP-5 Transistors BJT Oct 14asdsdasdFrancis Valdez LopezОценок пока нет
- Ec6503 Transmission Lines and Waveguides QBW (R2013)Документ22 страницыEc6503 Transmission Lines and Waveguides QBW (R2013)Beti GechОценок пока нет
- Villa Smart 2 Solar Power Back Up SystemДокумент4 страницыVilla Smart 2 Solar Power Back Up SystemCamaОценок пока нет
- 2.2. Inductor Volt-Second Balance, Capacitor Charge Balance, and The Small Ripple ApproximationДокумент11 страниц2.2. Inductor Volt-Second Balance, Capacitor Charge Balance, and The Small Ripple ApproximationGian Carlos Perea DiazОценок пока нет
- Prefix Pro BlendДокумент12 страницPrefix Pro BlendoconejerОценок пока нет
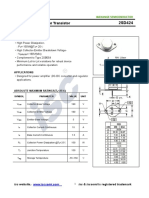
- 2 SD 424Документ2 страницы2 SD 424Ruben David Ibañez RetamalОценок пока нет
- Digsi 5Документ7 страницDigsi 5MilosОценок пока нет
- Digital Clock SystemДокумент39 страницDigital Clock SystemBipul Das100% (2)
- Catálogo KLIP XTREME y FORZA Enero 2014Документ126 страницCatálogo KLIP XTREME y FORZA Enero 2014Alfonso Alfaro CortezОценок пока нет
- Control Theory Quiz 1Документ5 страницControl Theory Quiz 1Sundas Khalid100% (1)
- Magnat Ultra 4000Документ13 страницMagnat Ultra 4000irfz44Оценок пока нет
- PL-2303HXD PL-2303HXD: Application For RS-232 TransceiverДокумент1 страницаPL-2303HXD PL-2303HXD: Application For RS-232 TransceiverMHZAОценок пока нет
- Basic Arduino NotesДокумент11 страницBasic Arduino NotesdanielОценок пока нет
- Organização Dos OBs de Um CLP Vipa Speed 7Документ30 страницOrganização Dos OBs de Um CLP Vipa Speed 7luizsnОценок пока нет
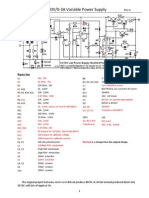
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Документ2 страницыModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraОценок пока нет
- Simatic S7-300: The Universal, Small Control System Supplemented by New, Compact CpusДокумент18 страницSimatic S7-300: The Universal, Small Control System Supplemented by New, Compact Cpuslucian07Оценок пока нет
- 2 42Документ2 страницы2 42Eric KialОценок пока нет
- Keen 600: The Power To ControlДокумент2 страницыKeen 600: The Power To ControlSky o skyОценок пока нет