Вам также может понравиться
- Cramer Raoh and Out 08Документ13 страницCramer Raoh and Out 08Waranda AnutaraampaiОценок пока нет
- Van Der Weele 2012Документ60 страницVan Der Weele 2012simplygadesОценок пока нет
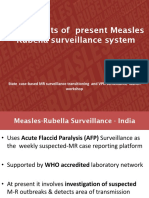
- 07a Ongoing MR Outbreak Surveillance SystemДокумент23 страницы07a Ongoing MR Outbreak Surveillance SystemDevendra Singh TomarОценок пока нет
- Abarbanel .-. The Analysis of Observed Chaotic Data in Physical SystemsДокумент62 страницыAbarbanel .-. The Analysis of Observed Chaotic Data in Physical SystemsluizomarОценок пока нет
- Binomial Logistic Regression Using SPSSДокумент11 страницBinomial Logistic Regression Using SPSSKhurram ZahidОценок пока нет
- SPSS ANNOTATED OUTPUT Discriminant Analysis 1Документ14 страницSPSS ANNOTATED OUTPUT Discriminant Analysis 1Aditya MehraОценок пока нет
- What Statistical Analysis Should I UseДокумент3 страницыWhat Statistical Analysis Should I UseeswarlalbkОценок пока нет
- Handleiding Spss Multinomial Logit RegressionДокумент35 страницHandleiding Spss Multinomial Logit RegressionbartvansantenОценок пока нет
- 08 Split PlotsДокумент25 страниц08 Split PlotsfrawatОценок пока нет
- Research Methods & Reporting: STARD 2015: An Updated List of Essential Items For Reporting Diagnostic Accuracy StudiesДокумент9 страницResearch Methods & Reporting: STARD 2015: An Updated List of Essential Items For Reporting Diagnostic Accuracy StudiesJorge Villoslada Terrones100% (1)
- The Logistic Regression Analysis in Spss - Statistics Solutions PDFДокумент2 страницыThe Logistic Regression Analysis in Spss - Statistics Solutions PDFSajjad HossainОценок пока нет
- Time Series Analysis and Its Applications: With R Examples: Second EditionДокумент18 страницTime Series Analysis and Its Applications: With R Examples: Second EditionPaula VilaОценок пока нет
- Quantile Regression (Final) PDFДокумент22 страницыQuantile Regression (Final) PDFbooianca100% (1)
- SPSS2 Workshop Handout 20200917Документ17 страницSPSS2 Workshop Handout 20200917kannan_r02Оценок пока нет
- Non Linear RegressionДокумент20 страницNon Linear RegressionPrasad TpОценок пока нет
- Quantile RegressionДокумент11 страницQuantile RegressionOvidiu RotariuОценок пока нет
- GSEMModellingusingStata PDFДокумент97 страницGSEMModellingusingStata PDFmarikum74Оценок пока нет
- Runs TestДокумент5 страницRuns TestdilpalsОценок пока нет
- Ordinal and Multinomial ModelsДокумент58 страницOrdinal and Multinomial ModelsSuhel Ahmad100% (1)
- 9.data AnalysisДокумент25 страниц9.data AnalysisEncik SyafiqОценок пока нет
- Logistic Regression TutorialДокумент25 страницLogistic Regression TutorialDaphneОценок пока нет
- Stata Graph Library For Network AnalysisДокумент41 страницаStata Graph Library For Network AnalysisAlexander SainesОценок пока нет
- How To Interpret and Report The Results From Multi Variable AnalysisДокумент6 страницHow To Interpret and Report The Results From Multi Variable AnalysisSofia Batalha0% (1)
- Logit Model For Binary DataДокумент50 страницLogit Model For Binary Datasoumitra2377Оценок пока нет
- Sampling Distribution and Simulation in RДокумент10 страницSampling Distribution and Simulation in RPremier PublishersОценок пока нет
- Microsoft Excel Essential Training: Raju Miyan Lecturer Khwopa College of EngineeringДокумент25 страницMicrosoft Excel Essential Training: Raju Miyan Lecturer Khwopa College of EngineeringDipjan ThapaОценок пока нет
- Introduction To RДокумент20 страницIntroduction To Rseptian_bbyОценок пока нет
- CatpcaДокумент19 страницCatpcaRodito AcolОценок пока нет
- Beta DistributionДокумент8 страницBeta DistributionSYED BAQAR HUSSAIN SHAHОценок пока нет
- Fernando, Logit Tobit Probit March 2011Документ19 страницFernando, Logit Tobit Probit March 2011Trieu Giang BuiОценок пока нет
- Arellano - Quantile Methods PDFДокумент10 страницArellano - Quantile Methods PDFInvestОценок пока нет
- 03 A Logistic Regression 2018Документ13 страниц03 A Logistic Regression 2018Reham TarekОценок пока нет
- Useful Stata CommandsДокумент48 страницUseful Stata CommandsumerfaridОценок пока нет
- I10064664-E1 - Statistics Study Guide PDFДокумент81 страницаI10064664-E1 - Statistics Study Guide PDFGift SimauОценок пока нет
- (Bruderl) Applied Regression Analysis Using StataДокумент73 страницы(Bruderl) Applied Regression Analysis Using StataSanjiv DesaiОценок пока нет
- Exploratory Data AnalysisДокумент38 страницExploratory Data Analysishss601Оценок пока нет
- Categorical Data AnalysisДокумент44 страницыCategorical Data Analysisamonra10Оценок пока нет
- Multivariate Analysis IBSДокумент20 страницMultivariate Analysis IBSrahul_arora_20Оценок пока нет
- T-Tests For DummiesДокумент10 страницT-Tests For DummiesMeganAislingОценок пока нет
- Session2-Simple Linear Model PDFДокумент56 страницSession2-Simple Linear Model PDFindrakuОценок пока нет
- Exploratory Data AnalysisДокумент106 страницExploratory Data AnalysisAbhi Giri100% (1)
- Data Science Course ContentДокумент8 страницData Science Course ContentQshore online trainingОценок пока нет
- 5 Regression AnalysisДокумент43 страницы5 Regression AnalysisAC BalioОценок пока нет
- Beta Distribution: First Kind, Whereasbeta Distribution of The Second Kind Is An Alternative Name For TheДокумент4 страницыBeta Distribution: First Kind, Whereasbeta Distribution of The Second Kind Is An Alternative Name For TheMichael BalzaryОценок пока нет
- Random ForestДокумент83 страницыRandom ForestBharath Reddy MannemОценок пока нет
- Survival Analysis in RДокумент16 страницSurvival Analysis in Rmipimipi03Оценок пока нет
- Prediction of Diabetes Using Logistics Regression Algorithms With FlaskДокумент10 страницPrediction of Diabetes Using Logistics Regression Algorithms With FlaskIJRASETPublicationsОценок пока нет
- Fundamental of Stat by S C GUPTAДокумент13 страницFundamental of Stat by S C GUPTAPushpa Banerjee14% (7)
- Chapter - 14 Advanced Regression ModelsДокумент49 страницChapter - 14 Advanced Regression ModelsmgahabibОценок пока нет
- Regression AnalysisДокумент58 страницRegression AnalysisHarshika DhimanОценок пока нет
- History of ProbabilityДокумент17 страницHistory of ProbabilityonlypingОценок пока нет
- 5682 - 4433 - Factor & Cluster AnalysisДокумент22 страницы5682 - 4433 - Factor & Cluster AnalysisSubrat NandaОценок пока нет
- Factor Analysis Xid-2898537 1 BSCdOjdTGSДокумент64 страницыFactor Analysis Xid-2898537 1 BSCdOjdTGSsandeep pradhanОценок пока нет
- Introduction To Neutrosophic StatisticsДокумент125 страницIntroduction To Neutrosophic StatisticsFlorentin SmarandacheОценок пока нет
- Analysis Analysis: Multivariat E Multivariat EДокумент12 страницAnalysis Analysis: Multivariat E Multivariat Epopat vishalОценок пока нет
- Lec Set 1 Data AnalysisДокумент55 страницLec Set 1 Data AnalysisSmarika KulshresthaОценок пока нет
- Graphical Representation of Multivariate DataОт EverandGraphical Representation of Multivariate DataPeter C. C. WangОценок пока нет
- Multivariate Analysis—III: Proceedings of the Third International Symposium on Multivariate Analysis Held at Wright State University, Dayton, Ohio, June 19-24, 1972От EverandMultivariate Analysis—III: Proceedings of the Third International Symposium on Multivariate Analysis Held at Wright State University, Dayton, Ohio, June 19-24, 1972Оценок пока нет
- Feasibility Study On The Seaweed Kappaphycus Alvarezii Cultivation Site in Indari Waters ofДокумент9 страницFeasibility Study On The Seaweed Kappaphycus Alvarezii Cultivation Site in Indari Waters ofUsman MadubunОценок пока нет
- Developing Agility and Quickness (Etc.) (Z-Library) - 66Документ2 страницыDeveloping Agility and Quickness (Etc.) (Z-Library) - 66guypetro6Оценок пока нет
- Chapter 5 TEstДокумент18 страницChapter 5 TEstJeanneau StadegaardОценок пока нет
- BCSL 058 Previous Year Question Papers by IgnouassignmentguruДокумент45 страницBCSL 058 Previous Year Question Papers by IgnouassignmentguruSHIKHA JAINОценок пока нет
- Sample Dewa Inspection CommentsДокумент2 страницыSample Dewa Inspection Commentsrmtaqui100% (1)
- Legend Of Symbols: Chú Thích Các Ký HiệuДокумент9 страницLegend Of Symbols: Chú Thích Các Ký HiệuKiet TruongОценок пока нет
- Moisture and Total Solids AnalysisДокумент44 страницыMoisture and Total Solids AnalysisNicholas BoampongОценок пока нет
- Mid Lesson 1 Ethics & Moral PhiloДокумент13 страницMid Lesson 1 Ethics & Moral PhiloKate EvangelistaОценок пока нет
- Classical Feedback Control With MATLAB - Boris J. Lurie and Paul J. EnrightДокумент477 страницClassical Feedback Control With MATLAB - Boris J. Lurie and Paul J. Enrightffranquiz100% (2)
- Unemployment in IndiaДокумент9 страницUnemployment in IndiaKhushiОценок пока нет
- Rumah Cerdas Bahasa Inggris Belajar Bahasa Inggris Dari Nol 4 Minggu Langsung BisaДокумент3 страницыRumah Cerdas Bahasa Inggris Belajar Bahasa Inggris Dari Nol 4 Minggu Langsung BisaArditya CitraОценок пока нет
- Effect of Vino Gano Ginger and Herbal Liquor On The Heamatological Parameters of The Wistar RatsДокумент5 страницEffect of Vino Gano Ginger and Herbal Liquor On The Heamatological Parameters of The Wistar RatsInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- PositioningДокумент2 страницыPositioningKishan AndureОценок пока нет
- Famous Bombers of The Second World War - 1st SeriesДокумент142 страницыFamous Bombers of The Second World War - 1st Seriesgunfighter29100% (1)
- An Evaluation of The Strength of Slender Pillars G. S. Esterhuizen, NIOSH, Pittsburgh, PAДокумент7 страницAn Evaluation of The Strength of Slender Pillars G. S. Esterhuizen, NIOSH, Pittsburgh, PAvttrlcОценок пока нет
- Radiation Formula SheetДокумент5 страницRadiation Formula SheetJakeJosephОценок пока нет
- Barium SulphateДокумент11 страницBarium SulphateGovindanayagi PattabiramanОценок пока нет
- Outerstellar Self-Impose RulesДокумент1 страницаOuterstellar Self-Impose RulesIffu The war GodОценок пока нет
- 1943 Dentures Consent FormДокумент2 страницы1943 Dentures Consent FormJitender ReddyОценок пока нет
- Campa Cola - WikipediaДокумент10 страницCampa Cola - WikipediaPradeep KumarОценок пока нет
- 1704 Broschuere Metal-Coating en EinzelseitenДокумент8 страниц1704 Broschuere Metal-Coating en EinzelseiteninterponОценок пока нет
- Water Sensitive Urban Design GuidelineДокумент42 страницыWater Sensitive Urban Design GuidelineTri Wahyuningsih100% (1)
- DLP Physical Science Week1Документ2 страницыDLP Physical Science Week1gizellen galvezОценок пока нет
- Notice - Appeal Process List of Appeal Panel (Final 12.1.24)Документ13 страницNotice - Appeal Process List of Appeal Panel (Final 12.1.24)FyBerri InkОценок пока нет
- Worksheet - Labeling Waves: NameДокумент2 страницыWorksheet - Labeling Waves: NameNubar MammadovaОценок пока нет
- Hyundai Forklift Catalog PTASДокумент15 страницHyundai Forklift Catalog PTASjack comboОценок пока нет
- Brainedema 160314142234Документ39 страницBrainedema 160314142234Lulu LuwiiОценок пока нет
- DLL - Mapeh 6 - Q2 - W8Документ6 страницDLL - Mapeh 6 - Q2 - W8Joe Marie FloresОценок пока нет
- Charles Haanel - The Master Key System Cd2 Id1919810777 Size878Документ214 страницCharles Haanel - The Master Key System Cd2 Id1919810777 Size878Hmt Nmsl100% (2)
- Holowicki Ind5Документ8 страницHolowicki Ind5api-558593025Оценок пока нет