Вам также может понравиться
- Build InstructionsДокумент30 страницBuild InstructionstotalbloodОценок пока нет
- 1901 TruckДокумент10 страниц1901 TruckGary B. Watts100% (3)
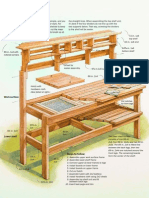
- Building A Potting Bench: Top Shelf UnitДокумент2 страницыBuilding A Potting Bench: Top Shelf UnitjteamОценок пока нет
- Car 1901packardДокумент8 страницCar 1901packardDillon Hartsyker100% (1)
- SolareclipseДокумент8 страницSolareclipseapi-273066804Оценок пока нет
- At-BOT ConsturctionManual EДокумент8 страницAt-BOT ConsturctionManual ENz225Оценок пока нет
- Knife Grinder - PlansДокумент21 страницаKnife Grinder - PlansRodney SmithОценок пока нет
- Ecksbot Electronics InstructionsДокумент78 страницEcksbot Electronics InstructionsjohnОценок пока нет
- Engine Stand PlansДокумент23 страницыEngine Stand PlansJoey WilletОценок пока нет
- ChickShaw 2Документ37 страницChickShaw 2sled77Оценок пока нет
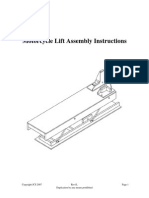
- Motorcycle Lift Assembly PlansДокумент29 страницMotorcycle Lift Assembly PlansCeapraga Florin100% (2)
- Pembuatan Dan Perencanaan GriderДокумент15 страницPembuatan Dan Perencanaan GriderErwan AchmadyaniОценок пока нет
- Belt Sander 0001Документ5 страницBelt Sander 0001wienslaw5804Оценок пока нет
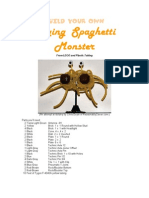
- Build Your Own Flying Spaghetti MonsterДокумент6 страницBuild Your Own Flying Spaghetti MonsterChristopher PlambeckОценок пока нет
- Mantis TetrixДокумент44 страницыMantis TetrixymemoОценок пока нет
- Grinder PlansДокумент17 страницGrinder PlansRobert Steven Ciaccio100% (1)
- Taig Lathe ManualДокумент12 страницTaig Lathe Manualspayt100% (1)
- DIY Raised Garden Bed For Under $40Документ16 страницDIY Raised Garden Bed For Under $40LonebeavОценок пока нет
- Build Guide - Ender 5 Exoslide Xy Motion KitДокумент6 страницBuild Guide - Ender 5 Exoslide Xy Motion KitGreg RobertsonОценок пока нет
- Robot StepsДокумент37 страницRobot Stepsapi-637290481Оценок пока нет
- Ultimaker 2 Assembly Manual V1.1Документ69 страницUltimaker 2 Assembly Manual V1.1petrkalousОценок пока нет
- Plantas CNC de Madeira Kit 1-1 PDFДокумент15 страницPlantas CNC de Madeira Kit 1-1 PDFalexandrearume5392Оценок пока нет
- Horseshoe Pit Plans - Rev.3Документ9 страницHorseshoe Pit Plans - Rev.3fullofwillОценок пока нет
- CNC Router AluminioДокумент48 страницCNC Router AluminioCássio Santos100% (2)
- Jib-Arm Remote Head Plans: by Cody DeeganДокумент10 страницJib-Arm Remote Head Plans: by Cody DeeganDarxidedj FijiОценок пока нет
- 1901 Half Scale TruckДокумент10 страниц1901 Half Scale TruckJim89% (9)
- Build ADIYLaminatorДокумент22 страницыBuild ADIYLaminatoredwin delgado riosОценок пока нет
- Ender3 XZ BeltZ Build GuideДокумент12 страницEnder3 XZ BeltZ Build GuideSeverino Campos BravoОценок пока нет
- Technic Pin With Friction 18 Technic Beam 2x4 Bent 90Документ2 страницыTechnic Pin With Friction 18 Technic Beam 2x4 Bent 90belajar arduinoОценок пока нет
- Coil Winder Rev 3-19-11Документ17 страницCoil Winder Rev 3-19-11dougforbes000Оценок пока нет
- Motorcycle LiftДокумент26 страницMotorcycle LiftChristos Papadakis100% (1)
- Deluxe Murphy Bed Plan FullДокумент22 страницыDeluxe Murphy Bed Plan Fullperffecto100% (3)
- Bench - Mendicino Bench PDFДокумент3 страницыBench - Mendicino Bench PDFmarianrkwОценок пока нет
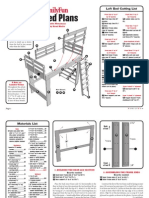
- Loft Bed PlansДокумент6 страницLoft Bed PlansDarryl Lashambe100% (2)
- Atv PlansДокумент90 страницAtv PlansK Scott Wyatt100% (6)
- Building Plans For ShedsДокумент24 страницыBuilding Plans For ShedsArik Seo100% (1)
- Free 12 X 8 Shed Plan: MyshedplansДокумент24 страницыFree 12 X 8 Shed Plan: MyshedplansWoody Glenn DeJongОценок пока нет
- My Seed PlansДокумент24 страницыMy Seed PlanswoodworkingprojectsОценок пока нет
- Allsport Ez-Go TXT Flip Seat InstructionsДокумент14 страницAllsport Ez-Go TXT Flip Seat InstructionsCaleb LoweryОценок пока нет
- Rigid Sportster Frame Assembly GuideДокумент14 страницRigid Sportster Frame Assembly GuideMalcolm DiamondОценок пока нет
- Frame Jig Assembly GuideДокумент12 страницFrame Jig Assembly GuideMalcolm DiamondОценок пока нет
- How To Build A MendelMax 1.5 3D PrinterДокумент124 страницыHow To Build A MendelMax 1.5 3D PrinterFr0styanОценок пока нет
- Slot Cutting On Vertical Milling MachineДокумент2 страницыSlot Cutting On Vertical Milling Machineasuras1234Оценок пока нет
- Prusa I3 Build Document by 3D Printer Czar PDFДокумент29 страницPrusa I3 Build Document by 3D Printer Czar PDFlasersmartОценок пока нет
- Direct Drive Mantis InstructionsДокумент22 страницыDirect Drive Mantis InstructionsTato LeonОценок пока нет
- Prusa I3 Frame Kit Build Manual PDFДокумент26 страницPrusa I3 Frame Kit Build Manual PDFEuclides RezendeОценок пока нет
- Makeblock ForkliftДокумент21 страницаMakeblock ForkliftMakeblock100% (1)
- ResearchplanДокумент3 страницыResearchplanapi-300873923Оценок пока нет
- Sonofresco Coffee Roaster Ignition Unit Replacement Instructions (Ram Module)Документ4 страницыSonofresco Coffee Roaster Ignition Unit Replacement Instructions (Ram Module)Rich DawsonОценок пока нет
- Home Built Brass TumblerДокумент3 страницыHome Built Brass TumblermohdbasriОценок пока нет
- WJ Rock Slider InstallДокумент1 страницаWJ Rock Slider InstallRAWS6Оценок пока нет
- Latte 15" Square Planter Assembly Instructions: Parts ListДокумент1 страницаLatte 15" Square Planter Assembly Instructions: Parts ListRobert FalligantОценок пока нет
- Doble NeckДокумент11 страницDoble NeckJavi AmorОценок пока нет
- Linotype Manual: Giving Detailed Instructions of the Proper Adjustment and Care of the LinotypeОт EverandLinotype Manual: Giving Detailed Instructions of the Proper Adjustment and Care of the LinotypeОценок пока нет
- The Pochade and Wet Panel Carrier Do It Yourself PlanОт EverandThe Pochade and Wet Panel Carrier Do It Yourself PlanРейтинг: 4 из 5 звезд4/5 (1)
- DualityprojectДокумент2 страницыDualityprojectapi-198081658Оценок пока нет
- Mwsgs 5Документ7 страницMwsgs 5api-198081658Оценок пока нет
- Criticessay Marxism PrideprejudiceДокумент4 страницыCriticessay Marxism Prideprejudiceapi-198081658Оценок пока нет
- College PrepДокумент13 страницCollege Prepapi-198081658Оценок пока нет
- LabreportformatДокумент3 страницыLabreportformatapi-198081658Оценок пока нет
- CoolidgeprepДокумент2 страницыCoolidgeprepapi-198081658Оценок пока нет
- Physics ThermodynamicsДокумент3 страницыPhysics Thermodynamicsapi-198081658Оценок пока нет
- UntitleddocumentДокумент2 страницыUntitleddocumentapi-198081658Оценок пока нет
- Robotics PresentationДокумент15 страницRobotics Presentationapi-198081658Оценок пока нет
- PendulumlabДокумент4 страницыPendulumlabapi-198081658Оценок пока нет
- RefractionlabДокумент4 страницыRefractionlabapi-198081658Оценок пока нет
- PhetlabДокумент2 страницыPhetlabapi-198081658Оценок пока нет
- MomentumenergycollisionslabДокумент4 страницыMomentumenergycollisionslabapi-198081658Оценок пока нет
- Phetlab 2Документ2 страницыPhetlab 2api-198081658Оценок пока нет
- ElectricalfieldlabДокумент2 страницыElectricalfieldlabapi-198081658Оценок пока нет
- PhetelectricstuffДокумент2 страницыPhetelectricstuffapi-198081658Оценок пока нет
- RainbowlabДокумент3 страницыRainbowlabapi-198081658Оценок пока нет
- Dialecticaljournals21 40 TKRДокумент7 страницDialecticaljournals21 40 TKRapi-198081658Оценок пока нет
- CoulombslawlabreportДокумент2 страницыCoulombslawlabreportapi-198081658Оценок пока нет
- Dialecticaljournals Deathofasalesman1 20Документ4 страницыDialecticaljournals Deathofasalesman1 20api-198081658Оценок пока нет
- ApfrqДокумент1 страницаApfrqapi-198081658Оценок пока нет
- Ap Us History Reflection - Julian HernandezДокумент8 страницAp Us History Reflection - Julian Hernandezapi-198081658Оценок пока нет
- Deathofasalesmanacttwo-Dialecticaljournals 1Документ4 страницыDeathofasalesmanacttwo-Dialecticaljournals 1api-198081658Оценок пока нет
- ProjectilemotionlabДокумент3 страницыProjectilemotionlabapi-198081658Оценок пока нет
- Section I: Introduction: Hernandez, Julian Period 2 12/16/13 LAB ReportДокумент3 страницыSection I: Introduction: Hernandez, Julian Period 2 12/16/13 LAB Reportapi-198081658Оценок пока нет
- Incline Lab 1Документ7 страницIncline Lab 1api-198081658Оценок пока нет
- MotionjulianДокумент4 страницыMotionjulianapi-198081658Оценок пока нет
- CartlabДокумент5 страницCartlabapi-198081658Оценок пока нет
- Labreportphysics GravityДокумент5 страницLabreportphysics Gravityapi-198081658Оценок пока нет
- WK2 Sample #2 of Group Project (Final Report)Документ68 страницWK2 Sample #2 of Group Project (Final Report)marchieeeОценок пока нет
- Curtis Controller 1232-1238Документ134 страницыCurtis Controller 1232-1238crash280467% (3)
- Quality Management Case StudyДокумент26 страницQuality Management Case StudyJim Juan Osman100% (1)
- 978 3 642 24106 2Документ696 страниц978 3 642 24106 2Purvi JainОценок пока нет
- Calibration Procedure of Concrete Batching Plant ScalesДокумент2 страницыCalibration Procedure of Concrete Batching Plant ScalesKevin Tang100% (2)
- ISO 9001 General AwarenessДокумент24 страницыISO 9001 General AwarenesspvendaraОценок пока нет
- Anritsu S331CДокумент16 страницAnritsu S331CjoefernsОценок пока нет
- EIT Course Gas Turbine Engineering CGT Brochure Rev3Документ3 страницыEIT Course Gas Turbine Engineering CGT Brochure Rev3gochi best100% (1)
- Instrument TransformerДокумент8 страницInstrument TransformerShaip DautiОценок пока нет
- FT Accesorios AMULET Innovality Options Products 2020Документ2 страницыFT Accesorios AMULET Innovality Options Products 2020luc1902Оценок пока нет
- WATO EX-20,30,35 Service Manual - English - 20131025 PDFДокумент258 страницWATO EX-20,30,35 Service Manual - English - 20131025 PDFGustavo79% (29)
- Electrical Equipment Check ListДокумент3 страницыElectrical Equipment Check ListPuran Singh LabanaОценок пока нет
- Labview Implementation of An Auto-Tuning Pid Regulator Via Grey-PredictorДокумент5 страницLabview Implementation of An Auto-Tuning Pid Regulator Via Grey-PredictorJulio CésarОценок пока нет
- Development of A Vision-Based Sorting Laboratoryv2Документ19 страницDevelopment of A Vision-Based Sorting Laboratoryv2Mihail AvramovОценок пока нет
- Planificación1 Turística y Desarrollo Sostenible - Jesús Rivas García, Marta Magadán Díaz - Google BooksДокумент4 страницыPlanificación1 Turística y Desarrollo Sostenible - Jesús Rivas García, Marta Magadán Díaz - Google BooksMaya Avellaneda0% (1)
- Karapatan NG MamimiliДокумент6 страницKarapatan NG MamimiliTheresa RayneraОценок пока нет
- Pod x3 EsquematicosДокумент162 страницыPod x3 EsquematicosCESAR CANEOОценок пока нет
- Operating Manual HC-M CheckweigherДокумент186 страницOperating Manual HC-M CheckweigherptamásОценок пока нет
- Spring MCQ QuizДокумент4 страницыSpring MCQ QuizsagarОценок пока нет
- 4GLTE NetworkExtender Enterprise User GuideДокумент57 страниц4GLTE NetworkExtender Enterprise User GuideAnkurRajSinhaОценок пока нет
- MobiUS SP1 Instructions For UseДокумент144 страницыMobiUS SP1 Instructions For UseDhoy GaviolaОценок пока нет
- Nasscom Annual Strategic Review Executive Summary 2022Документ14 страницNasscom Annual Strategic Review Executive Summary 2022Tejas Sodha100% (1)
- 301a PDFДокумент6 страниц301a PDFTomasz BОценок пока нет
- Business AnalyticsДокумент11 страницBusiness AnalyticsRAMYA CОценок пока нет
- EXP 2001C3 Experion PKS Fundamentals C300 Controller ImplementationДокумент1 страницаEXP 2001C3 Experion PKS Fundamentals C300 Controller ImplementationAji GeorgeОценок пока нет
- UCCX - 11 - Unified CCX Design Guide 11Документ126 страницUCCX - 11 - Unified CCX Design Guide 11yuriОценок пока нет
- Ayoun CV Process SafetyДокумент5 страницAyoun CV Process SafetyAyoun Ul HaqueОценок пока нет
- Cam Gears Install PDFДокумент2 страницыCam Gears Install PDFArshed RosalesОценок пока нет
- PM800BMSДокумент1 страницаPM800BMSjstefanisОценок пока нет
- Ais Chapter 2Документ20 страницAis Chapter 2MC San AntonioОценок пока нет