Вам также может понравиться
- 55 Cócteles Mas PedidosДокумент35 страниц55 Cócteles Mas PedidosYuli Michelle Bernaola CamposОценок пока нет
- AccesosДокумент2 страницыAccesosYuli Michelle Bernaola CamposОценок пока нет
- Obs MWsДокумент18 страницObs MWsYuli Michelle Bernaola CamposОценок пока нет
- ComandosДокумент2 страницыComandosYuli Michelle Bernaola CamposОценок пока нет
- Ptar IntroducionДокумент3 страницыPtar IntroducionYuli Michelle Bernaola CamposОценок пока нет
- TSS Site HuaranguilloДокумент1 страницаTSS Site HuaranguilloYuli Michelle Bernaola CamposОценок пока нет
- Carta Urb Santo DomingoДокумент1 страницаCarta Urb Santo DomingoYuli Michelle Bernaola CamposОценок пока нет
- Accesos Ebc Show RoomДокумент2 страницыAccesos Ebc Show RoomYuli Michelle Bernaola CamposОценок пока нет
- Tss Cusco Prol GrauДокумент19 страницTss Cusco Prol GrauYuli Michelle Bernaola CamposОценок пока нет
- Pim Plan Trabajo12313Документ5 страницPim Plan Trabajo12313Mil Ch0% (1)
- Fisicoquimica N 1Документ14 страницFisicoquimica N 1Yuli Michelle Bernaola CamposОценок пока нет
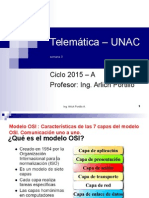
- Telemática Semana 3 - UNAC V1.0Документ23 страницыTelemática Semana 3 - UNAC V1.0Yuli Michelle Bernaola CamposОценок пока нет
- Eficiencia en MotoresДокумент16 страницEficiencia en MotoresJorge AlemánОценок пока нет
- Dimensionamiento de Un Call CenterДокумент11 страницDimensionamiento de Un Call CenterVictoria Herrera Marulanda100% (1)
- Programa Seminario Automatización IndustrialДокумент6 страницPrograma Seminario Automatización IndustrialYuli Michelle Bernaola CamposОценок пока нет
- Generador DC shuntДокумент8 страницGenerador DC shuntYuli Michelle Bernaola CamposОценок пока нет
- Control X ArmaduraДокумент2 страницыControl X ArmaduraYuli Michelle Bernaola CamposОценок пока нет
- Codigos de FuenteДокумент5 страницCodigos de FuenteYuli Michelle Bernaola CamposОценок пока нет
- Osiptel PuntosДокумент2 страницыOsiptel PuntosYuli Michelle Bernaola CamposОценок пока нет
- The Alphabet EiДокумент1 страницаThe Alphabet EiYuli Michelle Bernaola CamposОценок пока нет
- DianitaДокумент15 страницDianitaYuli Michelle Bernaola CamposОценок пока нет
- Juego de Instrucciones 8086-8088Документ17 страницJuego de Instrucciones 8086-8088Fernando Mamani RojasОценок пока нет
- Curso de Programación Básico de Android PDFДокумент51 страницаCurso de Programación Básico de Android PDFAntonio FerladoОценок пока нет
- Lab02 Tele3Документ6 страницLab02 Tele3Yuli Michelle Bernaola CamposОценок пока нет
- ImpresionДокумент13 страницImpresionYuli Michelle Bernaola CamposОценок пока нет
- SCRДокумент16 страницSCRmario0701Оценок пока нет
- EmmanuelДокумент1 страницаEmmanuelYuli Michelle Bernaola CamposОценок пока нет
- LB0743 Control Digital - VeranoДокумент3 страницыLB0743 Control Digital - VeranoJosetjОценок пока нет
- Guía Cosimir PDFДокумент41 страницаGuía Cosimir PDFEli TorresОценок пока нет
- Derivación IndividualДокумент38 страницDerivación Individualperrovaca17Оценок пока нет
- Unidad 1Документ39 страницUnidad 1Brenda Esther IbarraОценок пока нет
- Del Aguila ReДокумент291 страницаDel Aguila ReJulian Farje RondónОценок пока нет
- Documento Sin TítuloДокумент9 страницDocumento Sin TítuloDaniela RodriguezОценок пока нет
- Construya Una Fuente de Poder Simple ReguladaДокумент6 страницConstruya Una Fuente de Poder Simple ReguladaFernando PrzОценок пока нет
- UCSP - Silabo ELECTRICIAD INDUSTRIAL 2011-1Документ4 страницыUCSP - Silabo ELECTRICIAD INDUSTRIAL 2011-1Juan Carlos Valdez LoaizaОценок пока нет
- Adquisición de Datos NIMAXДокумент4 страницыAdquisición de Datos NIMAXDoni Fierro ÁlvarezОценок пока нет
- Manual de Practicas de Laboratorio - Lucia - Anorve - Final PDFДокумент4 страницыManual de Practicas de Laboratorio - Lucia - Anorve - Final PDFMarcos FerezОценок пока нет
- Claves para Dimensionar Un Grupo Electrógeno - Sullair ArgentinaДокумент2 страницыClaves para Dimensionar Un Grupo Electrógeno - Sullair Argentinalalo_edu25Оценок пока нет
- Tipos de motores eléctricos y sus característicasДокумент1 страницаTipos de motores eléctricos y sus característicasEru IlúvatarОценок пока нет
- BFSK, MSK y GMSKДокумент6 страницBFSK, MSK y GMSKCLaudia FernándezОценок пока нет
- Siemens Micromaster 420Документ6 страницSiemens Micromaster 420Fernando JuarezОценок пока нет
- Antenas Helicoidales y DipolosДокумент6 страницAntenas Helicoidales y DipolosBrayan Leonardo Ruiz LealОценок пока нет
- Curso Programación C PIC MicrocontroladoresДокумент39 страницCurso Programación C PIC MicrocontroladoresFabián ChagchaОценок пока нет
- Modos Direccion Amien To 6800Документ13 страницModos Direccion Amien To 6800CelesteCebedioОценок пока нет
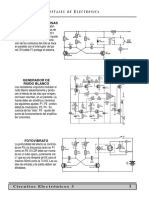
- 90 Proyectos Electronicos PDFДокумент32 страницы90 Proyectos Electronicos PDFPepe Barreiro100% (3)
- SPAJ144CДокумент22 страницыSPAJ144CManuel Javier ArduОценок пока нет
- Pruebas de SoftwareДокумент19 страницPruebas de SoftwareMoises ValdezОценок пока нет
- Fortalecemos la ciudadanía digitalДокумент8 страницFortalecemos la ciudadanía digitalJohn MorenoОценок пока нет
- Toaz - Info 1 Memoria de Calculo de Instalacion Electrica PRДокумент33 страницыToaz - Info 1 Memoria de Calculo de Instalacion Electrica PREmiliano MoralesОценок пока нет
- Informe de Proyecto Circuito de Retencion y MuestreoДокумент3 страницыInforme de Proyecto Circuito de Retencion y MuestreoDeubeaene APОценок пока нет
- Modular UltraДокумент4 страницыModular Ultratrin70Оценок пока нет
- TemporizadoresYGeneradoresRelojДокумент5 страницTemporizadoresYGeneradoresRelojJosue Miguel Flores AlvarezОценок пока нет
- Fundamentos Tecnicos Argenta eДокумент49 страницFundamentos Tecnicos Argenta eNoelia BallestínОценок пока нет
- Guía Práctica No2Документ5 страницGuía Práctica No2santiagoОценок пока нет
- U3 Part1 CrpiДокумент44 страницыU3 Part1 CrpiAreli MartinezОценок пока нет
- Practica Mecatronica: Tableros de MediciónДокумент4 страницыPractica Mecatronica: Tableros de MediciónYoltzin Hdez CОценок пока нет
- Características básicas del diodo semiconductorДокумент14 страницCaracterísticas básicas del diodo semiconductorcuevaОценок пока нет
- Vocabulario OIL&GASДокумент14 страницVocabulario OIL&GASAle MartínezОценок пока нет