Вам также может понравиться
- Foro 04 - Torres Seclen Bruno CesarДокумент19 страницForo 04 - Torres Seclen Bruno Cesardiego arriagaОценок пока нет
- Análisis Matemático III - 2013Документ6 страницAnálisis Matemático III - 2013Marlon TineoОценок пока нет
- Matemática 2 UTEC: Sílabo 2019Документ5 страницMatemática 2 UTEC: Sílabo 2019Frank Perez BaldeonОценок пока нет
- Mecánica de Medios ContínuosДокумент10 страницMecánica de Medios ContínuosYury Erick Rosales LeónОценок пока нет
- Cinematica y DinamicaДокумент4 страницыCinematica y DinamicaJulio C. Dominguez P.Оценок пока нет
- ANÁLISIS MATEMÁTICO II (61041071) - Curso - 2019 - PRESENTACIÓ N Y CONTEXTUALIZACIÓ N - Universidad Nacional de Educación A DistanciaДокумент10 страницANÁLISIS MATEMÁTICO II (61041071) - Curso - 2019 - PRESENTACIÓ N Y CONTEXTUALIZACIÓ N - Universidad Nacional de Educación A DistanciaNestininoUchihaОценок пока нет
- Informacion General CDAДокумент11 страницInformacion General CDAElle Cnic CtОценок пока нет
- Calculo VectorialДокумент5 страницCalculo VectorialozhvyОценок пока нет
- Planif AM III Ing-2018Документ14 страницPlanif AM III Ing-2018Flavio CanterosОценок пока нет
- Curso ALGOR FEAДокумент28 страницCurso ALGOR FEAHomero RamirezОценок пока нет
- Programa PDFДокумент4 страницыPrograma PDFStefania MosqueraОценок пока нет
- SistemaMulticuerpoDinámicaДокумент3 страницыSistemaMulticuerpoDinámicaTony CamposОценок пока нет
- Ecuaciones diferenciales: Guía docenteДокумент16 страницEcuaciones diferenciales: Guía docenteJONATHAN MORENO MORALESОценок пока нет
- MecanismosДокумент240 страницMecanismosИван СотоОценок пока нет
- Sistemas de Control - Guía TP1Документ93 страницыSistemas de Control - Guía TP1José Oliva0% (1)
- Teoría de Maquinas - Cardona Foix, Clos Costa 2001Документ240 страницTeoría de Maquinas - Cardona Foix, Clos Costa 2001ice1993100% (1)
- Formulación Newtoniana de ecuaciones de movimientoДокумент26 страницFormulación Newtoniana de ecuaciones de movimientorodrigornv33Оценок пока нет
- Manual Vibraciones CecilianoДокумент156 страницManual Vibraciones CecilianoRoberto MartinezОценок пока нет
- Ecuaciones DiferencialesДокумент10 страницEcuaciones DiferencialesmonicamoramОценок пока нет
- EL178 Señales y Sistemas 201600Документ5 страницEL178 Señales y Sistemas 201600Clases MatematicasОценок пока нет
- Matemática 2: Sílabo del curso 2019-2Документ6 страницMatemática 2: Sílabo del curso 2019-2mayte mory reyesОценок пока нет
- Analisis SenalesДокумент7 страницAnalisis SenalesFernando Adan Serrano OrozcoОценок пока нет
- MecánicaFluidosETSEIATДокумент16 страницMecánicaFluidosETSEIATCentipedeWormОценок пока нет
- Análisis Fourier SeñalesДокумент50 страницAnálisis Fourier Señalesvictor alfonso jaimes torresОценок пока нет
- Mecanismos 2Документ5 страницMecanismos 2doritaxxОценок пока нет
- Aplicación de Las Ecuaciones Diferenciales en La Ingeniería AeronáuticaДокумент7 страницAplicación de Las Ecuaciones Diferenciales en La Ingeniería AeronáuticaCristtian Esttiven Pachon100% (1)
- Notas Simulación Sistemas Ago Dic 2018 PDFДокумент41 страницаNotas Simulación Sistemas Ago Dic 2018 PDFBraYan Lagunas ToLedoОценок пока нет
- 25 IME Mecanica - Racional PDFДокумент6 страниц25 IME Mecanica - Racional PDFduviniОценок пока нет
- Syllabus de Calculo DiferencialДокумент10 страницSyllabus de Calculo DiferencialanthonyОценок пока нет
- Silabo Mecanica Teorica IIIДокумент5 страницSilabo Mecanica Teorica IIINormaCamposRamozОценок пока нет
- Teoría de Máquinas - Cardona Foix y Clos CostaДокумент239 страницTeoría de Máquinas - Cardona Foix y Clos CostaAlbert HernándezОценок пока нет
- Contenido Programatico EstaticaДокумент4 страницыContenido Programatico EstaticaAndres Felipe MartinezОценок пока нет
- RETO_aДокумент125 страницRETO_aLuis PedreroОценок пока нет
- Ecuacionesdif IДокумент2 страницыEcuacionesdif IJosé HenriquezОценок пока нет
- Mecánica de FluidosДокумент8 страницMecánica de FluidosYury Erick Rosales LeónОценок пока нет
- Ecuaciones Diferenciales AplicadasДокумент26 страницEcuaciones Diferenciales AplicadasAlejandro González GonzálezОценок пока нет
- Sílabo Cinemática y Dinámica.Документ6 страницSílabo Cinemática y Dinámica.Kirk LdkОценок пока нет
- Introducción Al Modelamiento Por EF Con ANSYSДокумент176 страницIntroducción Al Modelamiento Por EF Con ANSYSWaldemar Cepeda Murillo100% (1)
- 9 Trabajo2Документ15 страниц9 Trabajo2Kelly Arrazola SalasОценок пока нет
- Introduccion A La Mecanica Del Medio Continuo - Ing CivilДокумент8 страницIntroduccion A La Mecanica Del Medio Continuo - Ing CivilCarlos Eric Roa100% (1)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoОт EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Introducción a las señales y sistemasОт EverandIntroducción a las señales y sistemasРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Principios de transferencia de cantidad de movimientoОт EverandPrincipios de transferencia de cantidad de movimientoОценок пока нет
- El método de los elementos finitos: Un enfoque teórico prácticoОт EverandEl método de los elementos finitos: Un enfoque teórico prácticoРейтинг: 3 из 5 звезд3/5 (4)
- Guía para el análisis y solución de problemas de resistencia de materialesОт EverandGuía para el análisis y solución de problemas de resistencia de materialesОценок пока нет
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosОт EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosОценок пока нет
- Resistencia de materiales: algunos temas especiales (Segunda edición)От EverandResistencia de materiales: algunos temas especiales (Segunda edición)Рейтинг: 3 из 5 звезд3/5 (4)
- Métodos numéricos II: ecuaciones diferenciales, ordinarias y parcialesОт EverandMétodos numéricos II: ecuaciones diferenciales, ordinarias y parcialesОценок пока нет
- Mecatrónica: modelado, simulación y control de sistemas físicosОт EverandMecatrónica: modelado, simulación y control de sistemas físicosОценок пока нет
- Enfoque práctico de la teoría de robots: Con aplicaciones en MatlabОт EverandEnfoque práctico de la teoría de robots: Con aplicaciones en MatlabРейтинг: 5 из 5 звезд5/5 (2)
- Enfoque práctico de control moderno: Con aplicaciones en MatlabОт EverandEnfoque práctico de control moderno: Con aplicaciones en MatlabРейтинг: 5 из 5 звезд5/5 (1)
- TP 2Документ6 страницTP 2rodrigornv33Оценок пока нет
- Trabajo FinalДокумент12 страницTrabajo Finalrodrigornv33Оценок пока нет
- Bakunin, Mijail - Citas de Bakunin (Bakunin y Las Artes)Документ13 страницBakunin, Mijail - Citas de Bakunin (Bakunin y Las Artes)wiccamannonОценок пока нет
- Obra 1 VisitadaДокумент9 страницObra 1 Visitadarodrigornv33Оценок пока нет
- Ejercicios Diagramas de EsfuerzosДокумент28 страницEjercicios Diagramas de Esfuerzosrodrigornv33Оценок пока нет
- Clase 04. Ecuaciones de Lagrange. Casos y TeoriaДокумент36 страницClase 04. Ecuaciones de Lagrange. Casos y Teoriarodrigornv33Оценок пока нет
- 3 Ejercicios Diagramas de Esfuerzos 2Документ9 страниц3 Ejercicios Diagramas de Esfuerzos 2rodrigornv33Оценок пока нет
- AdvenimientodasДокумент1 страницаAdvenimientodasrodrigornv33Оценок пока нет
- 01 PFK RLMДокумент270 страниц01 PFK RLMAna parinisОценок пока нет
- Formulación de Ecuaciones de Ecuaciones de Movimiento en Modelos Discretos Mediante Formulación NewtonianaДокумент19 страницFormulación de Ecuaciones de Ecuaciones de Movimiento en Modelos Discretos Mediante Formulación Newtonianarodrigornv33Оценок пока нет
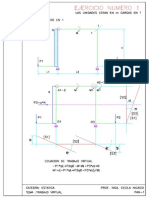
- Examen de TeodolitoДокумент3 страницыExamen de Teodolitorodrigornv33Оценок пока нет
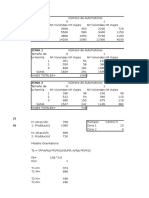
- Factores DinamicosДокумент6 страницFactores DinamicosNelson Ortega MayorgaОценок пока нет
- Hormigon Elaborado PPДокумент20 страницHormigon Elaborado PProdrigornv33Оценок пока нет
- Ejercicios Diagramas de EsfuerzosДокумент28 страницEjercicios Diagramas de Esfuerzosrodrigornv33Оценок пока нет
- Ecuaciones Dif. Ord. Cond. Inic. - Ejercicios ResueltosДокумент5 страницEcuaciones Dif. Ord. Cond. Inic. - Ejercicios Resueltosrodrigornv33Оценок пока нет
- Cargas Impulsivas - Integral de DuhamelДокумент5 страницCargas Impulsivas - Integral de DuhamelT͍̩i̶t̶͉o IvanОценок пока нет
- Termodinámica - Faires 140Документ1 страницаTermodinámica - Faires 140rodrigornv33Оценок пока нет
- Sup ModalДокумент9 страницSup ModalLucas Arcila SepulvedaОценок пока нет
- Flujo BidimensionalДокумент13 страницFlujo Bidimensionalrodrigornv33Оценок пока нет
- Algunos Casos de Cinemática Cuerpo RígidoДокумент9 страницAlgunos Casos de Cinemática Cuerpo Rígidorodrigornv33Оценок пока нет
- Clase 04. Ecuaciones de Lagrange. Casos y TeoriaДокумент36 страницClase 04. Ecuaciones de Lagrange. Casos y Teoriarodrigornv33Оценок пока нет
- Ecuaciones de Lagrange para cadena colgante y partícula en plano rotanteДокумент9 страницEcuaciones de Lagrange para cadena colgante y partícula en plano rotanterodrigornv33Оценок пока нет
- Suelos Nuevo 2012Документ47 страницSuelos Nuevo 2012rodrigornv33Оценок пока нет
- Clase 04 TransparenciasДокумент17 страницClase 04 Transparenciasrodrigornv33Оценок пока нет
- DiametrosДокумент12 страницDiametrosPedro RamirezОценок пока нет
- E Static A Elastic AДокумент9 страницE Static A Elastic Arodrigornv33Оценок пока нет
- Cargas Campos IIДокумент8 страницCargas Campos IIrodrigornv33Оценок пока нет
- Muros de Retención Tipos. Diseño Hormigon ArmadoДокумент49 страницMuros de Retención Tipos. Diseño Hormigon ArmadoWilder Hrcic0% (1)
- Ejercicios Tipo Suelos IДокумент15 страницEjercicios Tipo Suelos IJōƨē Āŀējānƌṝō100% (2)
- TP 1Документ10 страницTP 1rodrigornv33Оценок пока нет
- Branif Oxiline - MSDSДокумент5 страницBranif Oxiline - MSDSRasmin MinconsОценок пока нет
- Laboratorio Proceso de FundiciónДокумент9 страницLaboratorio Proceso de FundiciónDaniel Felipe Urbina SierraОценок пока нет
- Serie de ExergiaДокумент5 страницSerie de ExergiaMiguel Angel Santiago Gorostieta0% (1)
- Clasificacion de Soluciones QuímicasДокумент11 страницClasificacion de Soluciones QuímicasMendez Cruz Freddy Ricardo100% (1)
- Informe Laboratorio N°5Документ8 страницInforme Laboratorio N°5Daniel CarlosОценок пока нет
- Practicano.6-Obtención Del Ácido Benzoico Por Reactivo de GrignardДокумент16 страницPracticano.6-Obtención Del Ácido Benzoico Por Reactivo de GrignardCarlos Daniel Magariño Castellano78% (9)
- Practica Sobre MezclasДокумент2 страницыPractica Sobre MezclaslucianayouruОценок пока нет
- 02 - Bentonita SodicaДокумент7 страниц02 - Bentonita SodicaRosa Miluska Nuñez RamirezОценок пока нет
- Cuenca Hidrografica - DeyДокумент17 страницCuenca Hidrografica - DeyPaul Esleyter Cueva AlanguiaОценок пока нет
- Equilibrio químico y constantesДокумент90 страницEquilibrio químico y constantesLuisAlbertoMuniverAnguloОценок пока нет
- Diagrama de Solubilidad Triangular - Experiencia LaboratorioДокумент19 страницDiagrama de Solubilidad Triangular - Experiencia LaboratorioCarlos Ruben Suarez Gavidia100% (2)
- Presion de FracturaДокумент12 страницPresion de FracturaYeraldi Montiel AlorОценок пока нет
- Diferencia entre reflexión y refracción luzДокумент4 страницыDiferencia entre reflexión y refracción luzMonique SoaresОценок пока нет
- Práctica de ViscosidadДокумент8 страницPráctica de ViscosidadAbrahan Arias LarcoОценок пока нет
- Fichas SinteticosДокумент12 страницFichas SinteticosLeonardo TelloОценок пока нет
- Informe N 1 Densidad Jared RamosДокумент8 страницInforme N 1 Densidad Jared RamosJared Ray RamosОценок пока нет
- Comportamiento de Un Convertidor Catalitico Gonzalez Hernandez N 2016Документ120 страницComportamiento de Un Convertidor Catalitico Gonzalez Hernandez N 2016IsraelPala-RosasОценок пока нет
- HDS Adhesivo PVC VinilitДокумент10 страницHDS Adhesivo PVC VinilitFlora Iturra Mundaca100% (3)
- Calorimetria SolucionДокумент10 страницCalorimetria SolucionJosé Luis Fernandez MirandaОценок пока нет
- Cristales Problemas Estructura Red Densidad Rayos XДокумент6 страницCristales Problemas Estructura Red Densidad Rayos XArturo De La Luz Fuentes100% (1)
- Intervención al pozo #8 en Cerro Azul, VeracruzДокумент48 страницIntervención al pozo #8 en Cerro Azul, VeracruzIndra Damaris Tiburcio Longinos50% (2)
- Acido Citrico Granular F.TДокумент2 страницыAcido Citrico Granular F.TJhojan TinocoОценок пока нет
- TALLER SOBRE Nomenclatura 2021-1Документ8 страницTALLER SOBRE Nomenclatura 2021-1Vanesa AlexandraОценок пока нет
- Fi109ali2019 2Документ7 страницFi109ali2019 2David W-kc Almora Mamani - Ōf̲̲̅̅ı̲̲̅c̲̲̅̅ı̲̲̅̅a̲̲̅̅l̲̲̅̅'̲̲̅̅f̲̲̅̅bОценок пока нет
- Unidad 1Документ11 страницUnidad 1Paola AmayaОценок пока нет
- hds-615 HTG #2Документ4 страницыhds-615 HTG #2Hernan Ignacio Silva PeñaОценок пока нет
- Reactores ideales químicosДокумент11 страницReactores ideales químicosDavid JuniorОценок пока нет
- Actividad 1 - Toxicología Laboral - Revisión Del IntentoДокумент10 страницActividad 1 - Toxicología Laboral - Revisión Del IntentoJORGE RODRIGUEZОценок пока нет
- Moléculas y mezclas: masa molecular y porcentajes de átomosДокумент6 страницMoléculas y mezclas: masa molecular y porcentajes de átomosjorge edgar avendaño salgadoОценок пока нет
- Espectroscopia InfrarrojoДокумент6 страницEspectroscopia InfrarrojoMiriamRosalesОценок пока нет