Вам также может понравиться
- Manual DT-AVR Low Cost Micro System Rev1Документ2 страницыManual DT-AVR Low Cost Micro System Rev1Fauzan AnshariОценок пока нет
- Makalah ATMega16Документ15 страницMakalah ATMega16GaluhIrawan25% (4)
- PLC1 2Документ23 страницыPLC1 2KeznaPlayzОценок пока нет
- DMR Hytera Repeater Rd988Документ22 страницыDMR Hytera Repeater Rd988ali agremОценок пока нет
- Modul Praktikum Interfacing BaruДокумент33 страницыModul Praktikum Interfacing BaruDhami Johar DamiriОценок пока нет
- ATMEGA16Документ59 страницATMEGA16junskoe50% (2)
- Bab 2 - InterfacingДокумент23 страницыBab 2 - InterfacingMohammad RofiiОценок пока нет
- Gilbarco V0.1Документ21 страницаGilbarco V0.1argara delyОценок пока нет
- Komunikasi Serial Laporan 2Документ28 страницKomunikasi Serial Laporan 2ayuasterОценок пока нет
- Soal Essay SiskomДокумент4 страницыSoal Essay SiskomAden Rhendra Santanu100% (1)
- Microprosesor Dan Antarmuka - MP3 PlayerДокумент31 страницаMicroprosesor Dan Antarmuka - MP3 PlayerRizta AmaliahОценок пока нет
- Laporan Praktikum 1 Modul 2Документ18 страницLaporan Praktikum 1 Modul 2Aditia Darmadi J.Оценок пока нет
- Mikrokontroler Atmega8535 PDFДокумент26 страницMikrokontroler Atmega8535 PDFAbi SyafiqОценок пока нет
- BAB III MuzaeniДокумент23 страницыBAB III MuzaenikartikaОценок пока нет
- Interfacing Port Paralel KomputerДокумент42 страницыInterfacing Port Paralel KomputerfauzymasdyОценок пока нет
- MikrokontrolДокумент37 страницMikrokontroltrilaksana602Оценок пока нет
- InputДокумент24 страницыInputYoasHarpianОценок пока нет
- Interfacing Port Paralel KomputerДокумент32 страницыInterfacing Port Paralel KomputerUlan PradaniОценок пока нет
- Laporan MID 2 Komunikasi SerialДокумент35 страницLaporan MID 2 Komunikasi SerialayuasterОценок пока нет
- PanduanPLCДокумент42 страницыPanduanPLCR E P A R A N D O E N C A S AОценок пока нет
- PORT PARALELДокумент24 страницыPORT PARALELOlivia Dwi ParwitaОценок пока нет
- PMPLC2018 - Pemrograman C Mikrokontroler Dan PIOДокумент13 страницPMPLC2018 - Pemrograman C Mikrokontroler Dan PIOLydia Radita S NОценок пока нет
- ATMEGA16 PINДокумент10 страницATMEGA16 PINmasrifah harahap100% (1)
- Pertemuan 9. Buku Pelatihan InterfaceДокумент24 страницыPertemuan 9. Buku Pelatihan InterfaceIlham AlfajriОценок пока нет
- MODUL PRAKTIKUM ANTARMUKA DAN PERIPHERALДокумент61 страницаMODUL PRAKTIKUM ANTARMUKA DAN PERIPHERALRsky AmaliaОценок пока нет
- Kontrol AdaptifДокумент38 страницKontrol AdaptifQois Syihab0% (1)
- OPTIMIZED PORT PROGRAMMINGДокумент61 страницаOPTIMIZED PORT PROGRAMMINGNikolaus R. LarssonОценок пока нет
- Laporan Mekatronika PLCДокумент11 страницLaporan Mekatronika PLCafra.tr02Оценок пока нет
- PORT1_OUTPUTДокумент21 страницаPORT1_OUTPUTNovitri MaliniОценок пока нет
- PBLpra UASДокумент18 страницPBLpra UAS015Maulana Malik IbrahimОценок пока нет
- Manual Dt-Combo Avr-51 LcnsДокумент2 страницыManual Dt-Combo Avr-51 LcnsbangkitmuliaОценок пока нет
- OPTIMIZED TITLEДокумент12 страницOPTIMIZED TITLEBeny AbdurrahmanОценок пока нет
- ATMEGA328 PIN KONFIGURASIДокумент14 страницATMEGA328 PIN KONFIGURASIMila DwiОценок пока нет
- AVR ATmega8535Документ26 страницAVR ATmega8535sionОценок пока нет
- Cara Menggunakan Kabel Serial Adapter Usb RS232 Untuk Interface GW LinkДокумент17 страницCara Menggunakan Kabel Serial Adapter Usb RS232 Untuk Interface GW Linkhaerulamri67% (3)
- Pengembangan Robot Bergerak Jarak Jauh Berbasis BluetoothДокумент11 страницPengembangan Robot Bergerak Jarak Jauh Berbasis BluetoothBramantyo Warih Pamungkas100% (1)
- Tugas Komdat Soal Dan Jawaban (Irma Kumalawati) - CubahДокумент10 страницTugas Komdat Soal Dan Jawaban (Irma Kumalawati) - CubahtriwahyuningtyasОценок пока нет
- TEORI DASAR MIKROKONTROLERДокумент25 страницTEORI DASAR MIKROKONTROLERDodik SeptianОценок пока нет
- PLC1Документ30 страницPLC1hwhhadiОценок пока нет
- Sistem Minimum MikrokontrolerДокумент29 страницSistem Minimum MikrokontrolerKemasAlsyaAfrilianОценок пока нет
- Materi 4Документ26 страницMateri 4hariОценок пока нет
- Digital Mikroprosesor Periperal - AditДокумент34 страницыDigital Mikroprosesor Periperal - AditsitiОценок пока нет
- Modul CiscoДокумент26 страницModul Ciscohosepi7776Оценок пока нет
- 02 Sistem Minimum MikrokontrolerДокумент29 страниц02 Sistem Minimum MikrokontrolerNabila Dinda RahmaniaОценок пока нет
- Prorammable Logic Controlle Ext3Документ36 страницProrammable Logic Controlle Ext3eko_agussОценок пока нет
- Modul 2Документ8 страницModul 2Syahdan NugrohoОценок пока нет
- Modul 6 - Pemrograman Mikrokontroler Dengan Bahasa C LanjutДокумент23 страницыModul 6 - Pemrograman Mikrokontroler Dengan Bahasa C LanjutRamadhan PoeloenganОценок пока нет
- PRAKTIKUM 01 - Pratikum Piranti KendaliДокумент7 страницPRAKTIKUM 01 - Pratikum Piranti KendaliAgnes AgithaОценок пока нет
- Mikrokontroler AVR ATMega 8535 Spesifikasi dan FiturДокумент25 страницMikrokontroler AVR ATMega 8535 Spesifikasi dan FiturAlfatihah AzzahraОценок пока нет
- Sisco Paket Tracer-1Документ26 страницSisco Paket Tracer-1Chiko 182Оценок пока нет
- Laporan - JOB1 - Muhammad Raihan Akbar 5 ELBДокумент14 страницLaporan - JOB1 - Muhammad Raihan Akbar 5 ELBRaihan AkbarОценок пока нет
- Percobaan 1 Sistem KendaliДокумент35 страницPercobaan 1 Sistem KendaliadijunaОценок пока нет
- Proyekmikro 1 KeypadlcdrevisiДокумент34 страницыProyekmikro 1 KeypadlcdrevisiSinggih Prabowo AlmandaОценок пока нет
- WI Radio MW SIAE ALFOPlusДокумент21 страницаWI Radio MW SIAE ALFOPlusEdiansyahОценок пока нет
- UNTUK DOKUMEN BAB II DASAR TEORIДокумент15 страницUNTUK DOKUMEN BAB II DASAR TEORIFauzan IqbalОценок пока нет
- Manual USBer v2Документ1 страницаManual USBer v2Haris ApriyantoОценок пока нет
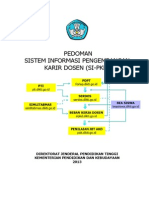
- Buku Pedoman SIPKDДокумент89 страницBuku Pedoman SIPKDTamam AsroriОценок пока нет
- OPTICAL BIOSENSOR2014-libre PDFДокумент12 страницOPTICAL BIOSENSOR2014-libre PDFHaris ApriyantoОценок пока нет
- Manual USBerДокумент1 страницаManual USBerHaris ApriyantoОценок пока нет
- Pedoman Beban Kerja DosenДокумент20 страницPedoman Beban Kerja DosenSutarum MartowijonoОценок пока нет
- PP Pendirian UGMДокумент2 страницыPP Pendirian UGMHaris ApriyantoОценок пока нет
- Manual TCPIP Starter KitДокумент2 страницыManual TCPIP Starter KitDafi YondraОценок пока нет
- An TcpipДокумент4 страницыAn TcpipHaris ApriyantoОценок пока нет
- 2004SK07 OtkДокумент7 страниц2004SK07 OtkHaris ApriyantoОценок пока нет
- Standar Acuan Penilan Beban Kerja Dosen Kopertis Wilayah IIIДокумент21 страницаStandar Acuan Penilan Beban Kerja Dosen Kopertis Wilayah IIIBang SomadОценок пока нет
- Art Fkip UnsДокумент12 страницArt Fkip UnsHaris ApriyantoОценок пока нет
- Skema Down Loader Port ParalelДокумент1 страницаSkema Down Loader Port ParalelFirman AditamaОценок пока нет
- Membuat Rangkaian dan PCBДокумент31 страницаMembuat Rangkaian dan PCBHaris ApriyantoОценок пока нет
- Membuat Rangkaian dan PCBДокумент31 страницаMembuat Rangkaian dan PCBHaris ApriyantoОценок пока нет
- Pembuatan PCB Secara OtomatisДокумент30 страницPembuatan PCB Secara OtomatisSatya PranataОценок пока нет
- Isi Manual Jamur PanganДокумент45 страницIsi Manual Jamur PanganHaris ApriyantoОценок пока нет
- Dasar Pemrograman MatlabДокумент10 страницDasar Pemrograman MatlabAmirul Ikhsan100% (1)
- Daftar Isi - Manual Jamur Merang Dan Tiram PutihДокумент7 страницDaftar Isi - Manual Jamur Merang Dan Tiram PutihHaris ApriyantoОценок пока нет
- Tutorial Praktis MatlabДокумент174 страницыTutorial Praktis Matlabhennyazalea9434100% (2)