Вам также может понравиться
- electricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209От Everandelectricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209Рейтинг: 4 из 5 звезд4/5 (5)
- Lab6 Contador de EnergiaДокумент15 страницLab6 Contador de EnergiaJuan VelascoОценок пока нет
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109От EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Оценок пока нет
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoОт EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoРейтинг: 5 из 5 звезд5/5 (1)
- Semana 13 Solución EjerciciosДокумент8 страницSemana 13 Solución EjerciciosEdwin Rosas100% (2)
- Semana de La Alimentación Saludable para NiñosДокумент24 страницыSemana de La Alimentación Saludable para NiñosMalena LauraОценок пока нет
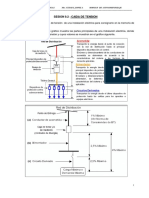
- Sesion 9.2 Caida de TensionДокумент4 страницыSesion 9.2 Caida de TensionAngelDiaz100% (1)
- Lab07 InformeДокумент18 страницLab07 InformeJUAN RIVERA DUEÑASОценок пока нет
- SEMANA 4 - NIC 24 Información A Revelar Sobre Parte RelacionadaДокумент25 страницSEMANA 4 - NIC 24 Información A Revelar Sobre Parte RelacionadaJonatan RamosОценок пока нет
- Avwin98 CAP1Документ24 страницыAvwin98 CAP1Terri TorioОценок пока нет
- LABORATORIO 4 MS Ensayo Corto CircuitoДокумент6 страницLABORATORIO 4 MS Ensayo Corto CircuitoRonald William Zapana MamaniОценок пока нет
- 1 Derecho Notarial y RegistralДокумент38 страниц1 Derecho Notarial y Registralreyna burboa100% (2)
- Triaxial CUДокумент4 страницыTriaxial CUFer Andrés100% (1)
- Ejemplos de Sistema de Lazo AbiertoДокумент7 страницEjemplos de Sistema de Lazo AbiertoCINTHIA DEL ÁNGEL SANTIAGOОценок пока нет
- Lab01 Control Digital FinalДокумент24 страницыLab01 Control Digital FinalDav LopFex100% (1)
- Maquinas DC ShuntДокумент12 страницMaquinas DC ShuntOmarAnibalGaitanPerezОценок пока нет
- Grupo Motor GeneradorДокумент10 страницGrupo Motor GeneradorMiguel Navarro Rojas100% (1)
- ElectrobisturiДокумент11 страницElectrobisturiKaren SastreОценок пока нет
- Examen SepДокумент89 страницExamen SepdiegoОценок пока нет
- I.Final 4 Maquinas Electricas FIEEДокумент18 страницI.Final 4 Maquinas Electricas FIEEJuan Carlos Ticse VerasteguiОценок пока нет
- Reporte Practica 6Документ12 страницReporte Practica 6Omar LlanosОценок пока нет
- Modelado y simulación de sistema electromecánicoДокумент6 страницModelado y simulación de sistema electromecánicoKevin Palma100% (1)
- Laboratorio #9 El Motor SincronoДокумент4 страницыLaboratorio #9 El Motor SincronoMikío Antonio Sánchez AchurraОценок пока нет
- Práctica 4 ElectricaДокумент65 страницPráctica 4 ElectricaSaruless RS0% (5)
- Informe 4 Lab Maquinas IДокумент5 страницInforme 4 Lab Maquinas IFelipe PérezОценок пока нет
- Informe 7Документ8 страницInforme 7David MolinaОценок пока нет
- Informe 5Документ21 страницаInforme 5alex597100% (1)
- Practica 7 Conexiones de Transformadores TrifasicosДокумент11 страницPractica 7 Conexiones de Transformadores TrifasicosOscar DimasОценок пока нет
- Generador SincronicoДокумент6 страницGenerador SincronicoFernando RinconОценок пока нет
- Práctica 4Документ15 страницPráctica 4DaniОценок пока нет
- Modelo de Máquina Corriente ContinuaДокумент9 страницModelo de Máquina Corriente ContinuaLuis D. Barrera GamboaОценок пока нет
- Hoja Guía Práctica 2Документ4 страницыHoja Guía Práctica 2WilsonОценок пока нет
- CORRECCIÓN FACTOR POTENCIA CIRCUITO MONOFÁSICOДокумент13 страницCORRECCIÓN FACTOR POTENCIA CIRCUITO MONOFÁSICOjostin13Оценок пока нет
- Informe Aplicaciones Del Divisor de CorrienteДокумент22 страницыInforme Aplicaciones Del Divisor de CorrienteDaniel DzmОценок пока нет
- Practica #3 Motor Trifasico 9 TerminalesДокумент9 страницPractica #3 Motor Trifasico 9 TerminalesMateo ChОценок пока нет
- Generador CC: Curva de magnetización y característica de cargaДокумент3 страницыGenerador CC: Curva de magnetización y característica de cargaJuan David RamírezОценок пока нет
- Pruebas en generador síncronoДокумент17 страницPruebas en generador síncronoAriel ChicaizaОценок пока нет
- Tarea1 FinalДокумент26 страницTarea1 FinalLucy Paez CortesОценок пока нет
- M2 FinalДокумент19 страницM2 FinalNirvanaxD100% (1)
- Practica 1Документ5 страницPractica 1AlexОценок пока нет
- Caracterizacion Dinamica de Un Motor DCДокумент8 страницCaracterizacion Dinamica de Un Motor DCJonnatan RomeroОценок пока нет
- 7guía N°7 Motores DC y MotorДокумент20 страниц7guía N°7 Motores DC y MotorMarco Antonio Pampa CondoriОценок пока нет
- Granda Leon Onofa Laboratorio6Документ5 страницGranda Leon Onofa Laboratorio6Danilo Leon GuerreroОценок пока нет
- Corrección Del Factor de PotenciaДокумент18 страницCorrección Del Factor de PotenciaEdyVidaNuevaОценок пока нет
- 2022 P4 Laboratorios de circuitos eléctricos N4Документ7 страниц2022 P4 Laboratorios de circuitos eléctricos N4Duberly Ramos FloresОценок пока нет
- Guía N°7 Motores DC y Motor Ac - DCДокумент13 страницGuía N°7 Motores DC y Motor Ac - DCHumbertoОценок пока нет
- Experiencia #08: Medida de La Potencia Electrica TrifasicaДокумент4 страницыExperiencia #08: Medida de La Potencia Electrica TrifasicaAleix CzОценок пока нет
- UNI Nac Ingeniería: Máquinas Eléctricas IIДокумент1 страницаUNI Nac Ingeniería: Máquinas Eléctricas IIluisosesti80Оценок пока нет
- Informe Final Lab - 4Документ8 страницInforme Final Lab - 4Jesus Dennis Carlos ButronОценок пока нет
- Tema II - Enunciado de Problemas de Compensación de Reactiva - Rev1Документ13 страницTema II - Enunciado de Problemas de Compensación de Reactiva - Rev1luisandradeОценок пока нет
- Pre Informe MS-1 Munzenmayer-Neira-VicttorianoДокумент14 страницPre Informe MS-1 Munzenmayer-Neira-VicttorianoNeira Francisco IgnacioОценок пока нет
- Silabo 1703237 Accionamientos Electricos (2022 B)Документ5 страницSilabo 1703237 Accionamientos Electricos (2022 B)giovanniОценок пока нет
- Generador Sincrono PruebasДокумент4 страницыGenerador Sincrono PruebasJORGE ARIEL CHICAIZA CHILUIZAОценок пока нет
- ELEC+ - Práctica #1Документ13 страницELEC+ - Práctica #1ytuotyuyioyiyОценок пока нет
- Trabajo Del Segundo ProductoДокумент14 страницTrabajo Del Segundo ProductoOSCAR VINICIO CHUQUITARCO LAGLAОценок пока нет
- Motor Sincrónico: 1. IntroducciónДокумент5 страницMotor Sincrónico: 1. Introducciónbyson2200Оценок пока нет
- IyME PEC2021 3Документ5 страницIyME PEC2021 3jinefep938Оценок пока нет
- Null 12Документ101 страницаNull 12Vsm Hns GlsОценок пока нет
- MQ ElectДокумент6 страницMQ ElectjoseОценок пока нет
- Guia de Problemas N - 4.2Документ5 страницGuia de Problemas N - 4.2Germán H. PeretaОценок пока нет
- Arranque Estrella Triángulo Con PLCДокумент10 страницArranque Estrella Triángulo Con PLCluis enrique100% (2)
- Experiencia 4-Flujo de PotenciaДокумент5 страницExperiencia 4-Flujo de PotenciakardraОценок пока нет
- Práctica 3. Circuitos EléctricosДокумент6 страницPráctica 3. Circuitos EléctricosAndrea GonzálezОценок пока нет
- Generador CC derivación control tensión UNAP PunoДокумент7 страницGenerador CC derivación control tensión UNAP PunoHedielEudysYucraPariapazaОценок пока нет
- Taller Avanzado 13Документ7 страницTaller Avanzado 13Jhoan PovedaОценок пока нет
- Tarea 1 MELДокумент1 страницаTarea 1 MELAnthony EspinozaОценок пока нет
- RLC-circuito transitorioДокумент36 страницRLC-circuito transitorioAlvaro RodrigoОценок пока нет
- Wa0013Документ22 страницыWa0013Junior Olivares GomezОценок пока нет
- Seguridad en El Taller Claves y ConsejosДокумент13 страницSeguridad en El Taller Claves y ConsejosVicto MolinariОценок пока нет
- Sensor de Color Disoric Manual Fsb50 M 60 g3Документ4 страницыSensor de Color Disoric Manual Fsb50 M 60 g3Junior Olivares GomezОценок пока нет
- Laboratorio 2-ControlavanzadoДокумент12 страницLaboratorio 2-ControlavanzadoJunior Olivares GomezОценок пока нет
- Curso General de Formación de Actuantes en Emergencias Nucleares. TEMA 00. Conceptos Básicos Sobre Protección RadiológicaДокумент20 страницCurso General de Formación de Actuantes en Emergencias Nucleares. TEMA 00. Conceptos Básicos Sobre Protección RadiológicaEzequiel RuizОценок пока нет
- Maquinas Electricas Tema1Документ34 страницыMaquinas Electricas Tema1Junior Olivares GomezОценок пока нет
- 03-Wimax FijoДокумент19 страниц03-Wimax FijoJunior Olivares GomezОценок пока нет
- IyCnet Controladores PID Resumen FinalДокумент8 страницIyCnet Controladores PID Resumen Finalroque valeraОценок пока нет
- Torres de EnfriamientoДокумент25 страницTorres de EnfriamientoMyrna Sarabia100% (1)
- EneroДокумент6 страницEneroJunior Olivares GomezОценок пока нет
- Contador Up Usando La PantallaДокумент3 страницыContador Up Usando La PantallaJunior Olivares GomezОценок пока нет
- Circuito de Relajacion Con Ujt 2n2646Документ2 страницыCircuito de Relajacion Con Ujt 2n2646Junior Olivares GomezОценок пока нет
- Tesis-Aspectos IntroductoriosДокумент8 страницTesis-Aspectos IntroductoriosJunior Olivares GomezОценок пока нет
- Estado Del ArteДокумент3 страницыEstado Del ArteJunior Olivares GomezОценок пока нет
- Capitulo I LabviewДокумент41 страницаCapitulo I LabviewJunior Olivares GomezОценок пока нет
- Investigacion OperativaДокумент4 страницыInvestigacion OperativaJunior Olivares GomezОценок пока нет
- M AquinasДокумент2 страницыM AquinasJunior Olivares GomezОценок пока нет
- EC2412. Problemas FM Y Receptor Superheterodino: Problema 1Документ24 страницыEC2412. Problemas FM Y Receptor Superheterodino: Problema 1Charles HillОценок пока нет
- Trabajo Investifacion de Lineas de TransmisionДокумент17 страницTrabajo Investifacion de Lineas de TransmisionJunior Olivares GomezОценок пока нет
- Formula RioДокумент1 страницаFormula RioJunior Olivares GomezОценок пока нет
- Problemas Resueltos de Fibras OpticasДокумент3 страницыProblemas Resueltos de Fibras OpticasJunior Olivares GomezОценок пока нет
- Control Digital - Labo2Документ6 страницControl Digital - Labo2Junior Olivares Gomez100% (1)
- Automatizacion Industrial Con PLCДокумент3 страницыAutomatizacion Industrial Con PLCUlises Gordillo ZapanaОценок пока нет
- Cuadra DaДокумент49 страницCuadra Da7ZETA7Оценок пока нет
- Tarea Numero 1 de Metodos NumericosДокумент9 страницTarea Numero 1 de Metodos NumericosJunior Olivares GomezОценок пока нет
- Solucionario Balotario de Matematicas AvanzadaДокумент25 страницSolucionario Balotario de Matematicas AvanzadaJunior Olivares GomezОценок пока нет
- ArquiДокумент6 страницArquiJunior Olivares GomezОценок пока нет
- Previo 4 D PotenciaДокумент5 страницPrevio 4 D PotenciaJunior Olivares GomezОценок пока нет
- Ficha Técnica Espárragos y TuercasДокумент4 страницыFicha Técnica Espárragos y TuercasHugo Marcelo Valdivia AguileraОценок пока нет
- 12 Pip Menor Trocha CarrozableДокумент23 страницы12 Pip Menor Trocha CarrozableJorge RenattoОценок пока нет
- 03-19-319-CL41 Medición de Estática de Fluido en TanquesДокумент8 страниц03-19-319-CL41 Medición de Estática de Fluido en Tanqueslolo_123456Оценок пока нет
- Modelo de Gestion Tactico Operativo PDFДокумент77 страницModelo de Gestion Tactico Operativo PDFJhonatanfaim UncpОценок пока нет
- TAREA I Música - ERIKAEUGENIДокумент3 страницыTAREA I Música - ERIKAEUGENIErika EugeniОценок пока нет
- Introducción Al Clima OrganizacionalДокумент10 страницIntroducción Al Clima OrganizacionalValentina AREVALO SANCHEZОценок пока нет
- Proceso Asignación Espacios Educación Media Superior Nuevo LeónДокумент2 страницыProceso Asignación Espacios Educación Media Superior Nuevo LeónAngel Aguillon CisnerosОценок пока нет
- Resolución Administrativa N°202-2013Документ15 страницResolución Administrativa N°202-2013oitedrstОценок пока нет
- Descontinuacion de ModelosДокумент2 страницыDescontinuacion de ModelosBeto FmJrОценок пока нет
- LINARES-PONCE, Partido ArqДокумент1 страницаLINARES-PONCE, Partido ArqRenatoLinaresGonzalesОценок пока нет
- Fica de Inmuebles de Conservacion HistoricaДокумент5 страницFica de Inmuebles de Conservacion HistoricaEmanuel GascaОценок пока нет
- FT 07Документ6 страницFT 07Gabriela TarazonaОценок пока нет
- Solución Guia N°5. ESTEQUIOMETRIA DE LA REACCION IДокумент5 страницSolución Guia N°5. ESTEQUIOMETRIA DE LA REACCION IPablo Santillán LopezОценок пока нет
- Calculo Dosificacion PDFДокумент33 страницыCalculo Dosificacion PDFcarlos delgadoОценок пока нет
- Farmacia Veterinaria Guia 1Документ2 страницыFarmacia Veterinaria Guia 1JUANA MICHEL DIAZ MEJIAОценок пока нет
- Practica 4Документ4 страницыPractica 4Andrea MotaОценок пока нет
- Negociación y Contratación InternacionalДокумент3 страницыNegociación y Contratación Internacionalyara espinozaОценок пока нет
- Ciclo Menstrual y Desarrollo EmbrionarioДокумент12 страницCiclo Menstrual y Desarrollo EmbrionarioRodriguez JuanitaОценок пока нет
- SRAMДокумент12 страницSRAMque buenoОценок пока нет
- Normas de tránsito y seguridad vial: Curso de capacitaciónДокумент18 страницNormas de tránsito y seguridad vial: Curso de capacitaciónandres gomez telloОценок пока нет
- Conservatorio de Música de Buenos Aires: Violoncello CIIДокумент1 страницаConservatorio de Música de Buenos Aires: Violoncello CIIOrquesta Tipica Caleta OliviaОценок пока нет
- Wuolah Free Tema 4 Servicio AISДокумент13 страницWuolah Free Tema 4 Servicio AISElpana cosmicoОценок пока нет
- Causa Báez PDFДокумент167 страницCausa Báez PDFSerá JusticiaОценок пока нет