Вам также может понравиться
- Lab 5 Sistemas de Segundo de OrdenДокумент27 страницLab 5 Sistemas de Segundo de OrdenCarlos Eduardo Vásquez BolañosОценок пока нет
- Laboratorio-04-Sistemas SCADA - Segunda ParteДокумент18 страницLaboratorio-04-Sistemas SCADA - Segunda ParteCarlos Eduardo Vásquez BolañosОценок пока нет
- Laboratorio-03-Sistemas SCADA - Primera ParteДокумент12 страницLaboratorio-03-Sistemas SCADA - Primera ParteCarlos Eduardo Vásquez BolañosОценок пока нет
- Lab 4 Sistemas de Primer de OrdenДокумент7 страницLab 4 Sistemas de Primer de OrdenCarlos Eduardo Vásquez BolañosОценок пока нет
- INFORME Lab-6-Identificacion-de-SistemasДокумент6 страницINFORME Lab-6-Identificacion-de-SistemasCarlos Eduardo Vásquez BolañosОценок пока нет
- INFORME-Laboratorio-02-Sistemas SCADA - TIA PORTALДокумент28 страницINFORME-Laboratorio-02-Sistemas SCADA - TIA PORTALCarlos Eduardo Vásquez BolañosОценок пока нет
- Informe - Lab 05 - Hmi - Hmi PV 600 PlusДокумент19 страницInforme - Lab 05 - Hmi - Hmi PV 600 PlusCarlos Eduardo Vásquez BolañosОценок пока нет
- INFORME - Lab 01 - HMI - HMI SIMATIC y S7 1200Документ19 страницINFORME - Lab 01 - HMI - HMI SIMATIC y S7 1200Carlos Eduardo Vásquez BolañosОценок пока нет
- INFORME - Lab 02 - HMI - Diseño HMIДокумент23 страницыINFORME - Lab 02 - HMI - Diseño HMICarlos Eduardo Vásquez BolañosОценок пока нет
- Informe - Lab 05 - Hmi - Hmi PV 600 PlusДокумент19 страницInforme - Lab 05 - Hmi - Hmi PV 600 PlusCarlos Eduardo Vásquez BolañosОценок пока нет
- Modbus TCP Comunicación Maestro EsclavoДокумент11 страницModbus TCP Comunicación Maestro EsclavoCarlos Eduardo Vásquez BolañosОценок пока нет
- Lab 06 - HMI - Diseño HMI - PV 600 PlusДокумент26 страницLab 06 - HMI - Diseño HMI - PV 600 PlusCarlos Eduardo Vásquez BolañosОценок пока нет
- INFORME - Lab 03 - HMI - HMI STU y TWIDOДокумент27 страницINFORME - Lab 03 - HMI - HMI STU y TWIDOCarlos Eduardo Vásquez BolañosОценок пока нет
- INFORME LAB 1 Hardware PCS7Документ14 страницINFORME LAB 1 Hardware PCS7Carlos Eduardo Vásquez BolañosОценок пока нет
- Informe Lab04Документ10 страницInforme Lab04Carlos Eduardo Vásquez BolañosОценок пока нет
- Laboratorio 04 GENERADOR SINCRONOДокумент11 страницLaboratorio 04 GENERADOR SINCRONOCarlos Eduardo Vásquez BolañosОценок пока нет
- Laboratorio 05 MAQUINA DE INDUCCIONДокумент13 страницLaboratorio 05 MAQUINA DE INDUCCIONCarlos Eduardo Vásquez BolañosОценок пока нет
- Laboratorio 01Документ12 страницLaboratorio 01Carlos Eduardo Vásquez BolañosОценок пока нет
- Informe Lab01 Pruebas Al Transformador MonofasicoДокумент17 страницInforme Lab01 Pruebas Al Transformador MonofasicoCarlos Eduardo Vásquez BolañosОценок пока нет
- PROFINET COMUNICACIÓN ENTRE PLCs S7-1200Документ38 страницPROFINET COMUNICACIÓN ENTRE PLCs S7-1200Carlos Eduardo Vásquez BolañosОценок пока нет
- Programacion en LadderДокумент39 страницProgramacion en LadderCarlos Eduardo Vásquez BolañosОценок пока нет
- Laboratorio 03 Motor DCДокумент15 страницLaboratorio 03 Motor DCCarlos Eduardo Vásquez BolañosОценок пока нет
- Maquina DC y Maquina SincronaДокумент15 страницMaquina DC y Maquina SincronaCarlos Eduardo Vásquez BolañosОценок пока нет
- Informe Lab3Документ18 страницInforme Lab3Carlos Eduardo Vásquez BolañosОценок пока нет
- Informe Lab 03Документ6 страницInforme Lab 03Carlos Eduardo Vásquez BolañosОценок пока нет
- Biografia de Isaac NewtonДокумент17 страницBiografia de Isaac NewtonGustavo GutierrezОценок пока нет
- CosmologiaДокумент5 страницCosmologiacarlos albertoОценок пока нет
- Canon de La Belleza y PlatónДокумент5 страницCanon de La Belleza y PlatónValentina ortegaОценок пока нет
- DoriforiasДокумент30 страницDoriforiasJavier SantanaОценок пока нет
- Los Planetas IlustradosДокумент6 страницLos Planetas IlustradosJessie WallОценок пока нет
- Calculo de Ayudas Ópticas en Baja VisiónДокумент19 страницCalculo de Ayudas Ópticas en Baja VisiónRodolfo Vic100% (1)
- Marco TeóricoДокумент3 страницыMarco TeóricoItzel Villanueva100% (5)
- Taller1 AДокумент3 страницыTaller1 ADiegoRicoCastilloОценок пока нет
- Informe Numero 6Документ23 страницыInforme Numero 6jherson7olivaresОценок пока нет
- Del Mito Al LogosДокумент9 страницDel Mito Al LogosMariana Alvarez Arboleda100% (1)
- UmbertoEco PenduloFoucault1 0Документ397 страницUmbertoEco PenduloFoucault1 0Fran Casas100% (5)
- Qué Es La Nada, La Nada Es DiosДокумент8 страницQué Es La Nada, La Nada Es DiosSalvador Sánchez MelgarОценок пока нет
- Acceder A La Sabiduria EstelarДокумент8 страницAcceder A La Sabiduria EstelarPepaPerezGarciaОценок пока нет
- Mito de Las Cavernas MitoДокумент2 страницыMito de Las Cavernas MitoMaicol CavicheОценок пока нет
- Las Coordenadas Geograficas PDFДокумент2 страницыLas Coordenadas Geograficas PDFjose antonio carazoОценок пока нет
- Sobre Gravedad Cuántica PDFДокумент7 страницSobre Gravedad Cuántica PDFAlejandro GafОценок пока нет
- Proyecto 5ficha Semana 15Документ6 страницProyecto 5ficha Semana 15Orlando VillagómezОценок пока нет
- Ekam o Singularidad o Wahdaniyatversion FinalДокумент17 страницEkam o Singularidad o Wahdaniyatversion FinaloronuevoОценок пока нет
- Movimiento Rectilineo UniformeДокумент4 страницыMovimiento Rectilineo UniformeYoisy CastilloОценок пока нет
- FICHA DE LECTURA N°7 - Manuel Emilio Salazar MoralesДокумент7 страницFICHA DE LECTURA N°7 - Manuel Emilio Salazar Moralesmanuelsalm5459Оценок пока нет
- Fisica Moderna 1Документ90 страницFisica Moderna 1Anonymous JIoaxmОценок пока нет
- CoordenadashorizontalesДокумент1 страницаCoordenadashorizontalesPIRATE28Оценок пока нет
- Propiedades Las Estrellas OrdinariasДокумент39 страницPropiedades Las Estrellas OrdinariasJoe BerroteranОценок пока нет
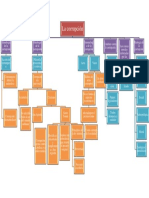
- La Corrupción (Mapa Conceptual)Документ1 страницаLa Corrupción (Mapa Conceptual)Lizzie Ortiz60% (5)
- Clase 28 Agosto Fis 2Документ8 страницClase 28 Agosto Fis 2Javier LescanoОценок пока нет
- Origenes de La Teoría de Las Relaciones HumanasДокумент3 страницыOrigenes de La Teoría de Las Relaciones HumanasmimiОценок пока нет
- Practica MRU 1Документ16 страницPractica MRU 1Freddy Roland Velasquez SotoОценок пока нет
- Esfera de Jacobi WordДокумент3 страницыEsfera de Jacobi Wordmaxrivmen19Оценок пока нет
- Introducción A La Topografia Unidad 5Документ15 страницIntroducción A La Topografia Unidad 5Jorge Ivan Garcia LozanoОценок пока нет
- Filosofia ArgesДокумент7 страницFilosofia ArgesmahcflyОценок пока нет