Вам также может понравиться
- p2-c23-15 Guía Carga y Descarga Transporte de Mercancías Peligrosas CarreteraДокумент46 страницp2-c23-15 Guía Carga y Descarga Transporte de Mercancías Peligrosas CarreteraPedro Jesus Quesada PerezОценок пока нет
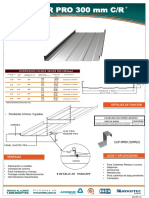
- Master Pro 300 MM CRДокумент1 страницаMaster Pro 300 MM CRalialansitoОценок пока нет
- Perfiltec GДокумент3 страницыPerfiltec GalialansitoОценок пока нет
- Perfiltec Fibrocemento ParedДокумент1 страницаPerfiltec Fibrocemento ParedalialansitoОценок пока нет
- Master Wall Tipo AДокумент1 страницаMaster Wall Tipo AalialansitoОценок пока нет
- Master Pro 300 MM CRДокумент1 страницаMaster Pro 300 MM CRalialansitoОценок пока нет
- Perfiltec CДокумент2 страницыPerfiltec CalialansitoОценок пока нет
- Metaldeck 2Документ1 страницаMetaldeck 2alialansitoОценок пока нет
- Master Green CubiertaДокумент1 страницаMaster Green CubiertaalialansitoОценок пока нет
- Master Green ParedДокумент1 страницаMaster Green ParedalialansitoОценок пока нет
- Master OnduladoДокумент1 страницаMaster OnduladoalialansitoОценок пока нет
- Master Pro 300 MM CRДокумент1 страницаMaster Pro 300 MM CRalialansitoОценок пока нет
- Nte Inen Iso 9229extractoДокумент7 страницNte Inen Iso 9229extractoalialansitoОценок пока нет
- Master 1000Документ1 страницаMaster 1000alialansitoОценок пока нет
- Propiedades Fisicas Del FibrocementoДокумент2 страницыPropiedades Fisicas Del FibrocementoJah RastamanОценок пока нет
- Acuerdo Ministerial 29 16Документ1 страницаAcuerdo Ministerial 29 16alialansitoОценок пока нет
- Caracterizaciond de Espuma Rigida de Poliuretano ExpandidoДокумент14 страницCaracterizaciond de Espuma Rigida de Poliuretano ExpandidoalialansitoОценок пока нет
- Procesos Patológicos Frecuentes en EdificacionesДокумент5 страницProcesos Patológicos Frecuentes en EdificacionesalialansitoОценок пока нет
- Problemas EstruccturalesДокумент11 страницProblemas EstruccturalesJeremy RenojoОценок пока нет
- Tablas Dimension A Mien To Equipo de Aire AcondicionadoДокумент3 страницыTablas Dimension A Mien To Equipo de Aire AcondicionadosandravelazqueziОценок пока нет
- BasesDelConcurso - Coordinador de ProyectosДокумент1 страницаBasesDelConcurso - Coordinador de ProyectosalialansitoОценок пока нет
- Holcim Elaborar HormigonДокумент8 страницHolcim Elaborar HormigonEdisonLeonardoGarciaMoralesОценок пока нет
- Reglamento de Seguridad y Salud para La Construcción y Obras PúblicasДокумент70 страницReglamento de Seguridad y Salud para La Construcción y Obras PúblicasCristhian AlcivarОценок пока нет
- Basesdelconcurso-Asistente de EstudiosДокумент1 страницаBasesdelconcurso-Asistente de EstudiosalialansitoОценок пока нет
- BasesDelConcurso-4 SUPERINTENDENCIA ANALISTA ADMINISTRACION DOCUMENTARIA PDFДокумент1 страницаBasesDelConcurso-4 SUPERINTENDENCIA ANALISTA ADMINISTRACION DOCUMENTARIA PDFalialansitoОценок пока нет
- Acuerdo Ministerial 29 16Документ34 страницыAcuerdo Ministerial 29 16Diego VergaraОценок пока нет
- Basesdelconcurso-5 Superintendencia Analista Obras CivilesДокумент1 страницаBasesdelconcurso-5 Superintendencia Analista Obras CivilesalialansitoОценок пока нет
- BasesDelConcurso-ASISTENTE DE ESTUDIOS PDFДокумент1 страницаBasesDelConcurso-ASISTENTE DE ESTUDIOS PDFalialansitoОценок пока нет
- BasesDelConcurso-5 SUPERINTENDENCIA ANALISTA OBRAS CIVILES PDFДокумент1 страницаBasesDelConcurso-5 SUPERINTENDENCIA ANALISTA OBRAS CIVILES PDFalialansitoОценок пока нет
- Analista Tecnico Atencion Al Ciudadano - Subsecretaria HidrograficaДокумент1 страницаAnalista Tecnico Atencion Al Ciudadano - Subsecretaria HidrograficaalialansitoОценок пока нет
- Calculo de CaudalДокумент8 страницCalculo de CaudalBryan Cristian Medina Corilloclla100% (1)
- Informe Dosificacion de Hormigones Método Americano Aci 211Документ31 страницаInforme Dosificacion de Hormigones Método Americano Aci 211Edwin VillaОценок пока нет
- ID 1439 CalderonДокумент11 страницID 1439 CalderonFrancisco CalderonОценок пока нет
- Fisica Taller 1Документ5 страницFisica Taller 1Mario BustosОценок пока нет
- LM75 TechData Spanish March 14 2014 (AppReady) PDFДокумент8 страницLM75 TechData Spanish March 14 2014 (AppReady) PDFjonathan fuentesОценок пока нет
- Teoria Proyecto ElevacionДокумент16 страницTeoria Proyecto ElevacionCristianОценок пока нет
- GUIA PRIMERO BACH CBI (Reparado)Документ88 страницGUIA PRIMERO BACH CBI (Reparado)Daniel MuñozОценок пока нет
- Carga PermisibleДокумент5 страницCarga PermisibleKevinzuky Vargas100% (2)
- Examen 1 DecimoДокумент2 страницыExamen 1 DecimoMANUEL GUSTINОценок пока нет
- Practica de Lab. N°1 - ELECTRIZACIONДокумент12 страницPractica de Lab. N°1 - ELECTRIZACIONOrlandoPelaezChilonОценок пока нет
- Sesión 1 - Álgebra Vectorial (Modo de Compatibilidad)Документ13 страницSesión 1 - Álgebra Vectorial (Modo de Compatibilidad)Rudolf Keith Muñoz CristobalОценок пока нет
- CF 5F3 A Física Nuclear Y Departículas: SEMESTRE 2022-1Документ20 страницCF 5F3 A Física Nuclear Y Departículas: SEMESTRE 2022-1ALEJANDRO FALCONERIO TORRES MALDONADOОценок пока нет
- Clasificacion de CanalesДокумент13 страницClasificacion de Canalescristian david tacsa castilloОценок пока нет
- TQ Problemario2012Документ45 страницTQ Problemario2012Alfrdo Lopz0% (1)
- Geometri AnaliticaДокумент8 страницGeometri AnaliticaYuriko GonzalezОценок пока нет
- Marco Teorico TermodinamicaДокумент2 страницыMarco Teorico Termodinamicapaula escalanteОценок пока нет
- Ejercicios de Transformadores MonofasicosДокумент5 страницEjercicios de Transformadores Monofasicosantoniolupita123Оценок пока нет
- INTELLI - Grapas Conectores y VarillasДокумент2 страницыINTELLI - Grapas Conectores y VarillasSantiago PazОценок пока нет
- Plano CartesianoДокумент2 страницыPlano CartesianoAxel GiancarloОценок пока нет
- Ecuacion de ReynoldsДокумент10 страницEcuacion de ReynoldsMARLIOVER SAN JUANОценок пока нет
- Desequilibrio en El Suministro Trifásico - Franklin Electric Noticias Del MercadoДокумент4 страницыDesequilibrio en El Suministro Trifásico - Franklin Electric Noticias Del MercadoJulio MendozaОценок пока нет
- El Cálculo de La Fugacidad en Mezclas Gaseosas Se Realiza A Través Del Coeficiente de FugacidadДокумент3 страницыEl Cálculo de La Fugacidad en Mezclas Gaseosas Se Realiza A Través Del Coeficiente de FugacidadEnriqueCondoFОценок пока нет
- Guía de Laboratorio Del Intercambiador de PlacasДокумент10 страницGuía de Laboratorio Del Intercambiador de PlacasPaul BladimirОценок пока нет
- PowerLogic PM700 PM750MGДокумент2 страницыPowerLogic PM700 PM750MGaalinares1Оценок пока нет
- Manual Enerlux EPF6, 8, 12Документ3 страницыManual Enerlux EPF6, 8, 12Cristian Fernandez83% (6)
- Tabla Periodica - ManualДокумент6 страницTabla Periodica - ManualPedro Garcia ArgomedoОценок пока нет
- EL VACIO Y LA NADA Alvaro de Rujula 2019 2008 1998 Naukas ComДокумент7 страницEL VACIO Y LA NADA Alvaro de Rujula 2019 2008 1998 Naukas ComjurjizadaОценок пока нет
- Antología FísicaДокумент29 страницAntología FísicaJose EstebanОценок пока нет
- La Tabla PeriódicaДокумент23 страницыLa Tabla PeriódicaNuriaGonzalesОценок пока нет
- Medios Continuos Unidad 3Документ53 страницыMedios Continuos Unidad 3Yair Regalado Gallegos50% (2)