Вам также может понравиться
- Teclado Matricial Con ArduinoДокумент4 страницыTeclado Matricial Con ArduinojoeОценок пока нет
- Coleccion Encuentro Inet - Maquinas Herramientas CAP 1-2-3 y 4Документ76 страницColeccion Encuentro Inet - Maquinas Herramientas CAP 1-2-3 y 4Czo Rjs Javier100% (1)
- Serie IberoamericanaДокумент10 страницSerie IberoamericanaJhoex MollОценок пока нет
- Portafolio de EvidenciasДокумент135 страницPortafolio de EvidenciasAnelDominguezОценок пока нет
- Controladores Digitales de Señales 2003Документ26 страницControladores Digitales de Señales 2003phillamxОценок пока нет
- Reporte Yugo Escoces Imet 8A Equipo 5Документ4 страницыReporte Yugo Escoces Imet 8A Equipo 5Guillermo Filoteo SaucedaОценок пока нет
- Puertos de Salida Arduino PracticaДокумент21 страницаPuertos de Salida Arduino Practicamika colque100% (1)
- Diseño de Controladores DigitalesДокумент16 страницDiseño de Controladores DigitalesNicolás QuirogaОценок пока нет
- Segundo ApunteДокумент41 страницаSegundo ApunteJuan Carlos YurquinaОценок пока нет
- Guía Rubrica Observación y Entrevista 403011 - Paso 2 Diseño Del Diario de CampoДокумент11 страницGuía Rubrica Observación y Entrevista 403011 - Paso 2 Diseño Del Diario de CampoSemillero Investigación Con-CienciaОценок пока нет
- Practica 4Документ6 страницPractica 4Jonathan VillagómezОценок пока нет
- Detección y Diagnostico de Fallas en VehiculosДокумент9 страницDetección y Diagnostico de Fallas en VehiculosArturo CMОценок пока нет
- Modelado 3DДокумент53 страницыModelado 3DasierОценок пока нет
- Historia de Los RobotsДокумент9 страницHistoria de Los RobotsLeonardoAlomiaОценок пока нет
- Ejemplo Minuta y ActaДокумент3 страницыEjemplo Minuta y ActaJuan ManuelОценок пока нет
- Es Stellarium User Guide-0.8.2-1Документ86 страницEs Stellarium User Guide-0.8.2-1GAMEVICОценок пока нет
- Centros Instantaneos y Centros de Rotacion de VehiculosДокумент21 страницаCentros Instantaneos y Centros de Rotacion de VehiculosDorian Rivas100% (1)
- Normalizacionde Motores Iec VsДокумент1 страницаNormalizacionde Motores Iec VsCarlos ChalcoОценок пока нет
- Ambiente Integrado Del DesarrolloДокумент2 страницыAmbiente Integrado Del DesarrolloAlma LunaОценок пока нет
- UNIDAD 6 RoboticaДокумент10 страницUNIDAD 6 RoboticaAlberto Sánchez Delgado100% (1)
- Club Saber Electrnica - Curso Superior de TV Color - (PDF Document) PDFДокумент5 страницClub Saber Electrnica - Curso Superior de TV Color - (PDF Document) PDFIglesia RestauracionОценок пока нет
- Plan de Tesis - Implementacion Del Mantenimiento Preventivo Basado en El Análisis de Vibraciones en El Motor de 401 HPДокумент25 страницPlan de Tesis - Implementacion Del Mantenimiento Preventivo Basado en El Análisis de Vibraciones en El Motor de 401 HPFrank GalvanОценок пока нет
- Anotaciones Asme Y14.5-2009Документ18 страницAnotaciones Asme Y14.5-2009vmonrroy7450Оценок пока нет
- EmcoДокумент80 страницEmcoOscar LagosОценок пока нет
- Termografia Principios AplicacionesДокумент17 страницTermografia Principios AplicacionesAnonymous yEL4YvJCОценок пока нет
- Tarea de Vibraciones MecánicasДокумент12 страницTarea de Vibraciones MecánicasLuis Ignacio Torres GonzálezОценок пока нет
- Sew Mdx61b EncoderДокумент72 страницыSew Mdx61b EncoderEva SuárezОценок пока нет
- Estandar Europeo y AmericanoДокумент9 страницEstandar Europeo y AmericanoAngel Carrillo MarquezОценок пока нет
- 20 Causas Comunes de Falla en Los Circuitos y Su SoluciónДокумент6 страниц20 Causas Comunes de Falla en Los Circuitos y Su SoluciónVanne ManriqueОценок пока нет
- Reporte de Práctica 1 - Robotica - Componentes de Un RobotДокумент21 страницаReporte de Práctica 1 - Robotica - Componentes de Un RobotAlex VargasОценок пока нет
- Ética - para - Ingenieros - (PG - 111 121)Документ11 страницÉtica - para - Ingenieros - (PG - 111 121)Gildardo Parra FlorexОценок пока нет
- TRAYECTORIASДокумент23 страницыTRAYECTORIASCarlos VazquezОценок пока нет
- Mecanismos de FallaДокумент10 страницMecanismos de FallaWilliam Jesus Cabrera MezaОценок пока нет
- Curso MicrocontroladoresДокумент20 страницCurso MicrocontroladoresPedro GarciaОценок пока нет
- Introduccion A La Programacion CNC Modulo I PDFДокумент19 страницIntroduccion A La Programacion CNC Modulo I PDFJonathan ZárateОценок пока нет
- Tema 6Документ48 страницTema 6LizGonzalezC100% (1)
- Jerarquía de MemoriaДокумент1 страницаJerarquía de MemoriaAngela CuelloОценок пока нет
- 6 Planificación de TrayectoriasДокумент12 страниц6 Planificación de TrayectoriasCarlos Avilés100% (1)
- Vibraciones MecanicasДокумент65 страницVibraciones MecanicasAdrian GamezОценок пока нет
- Sistemas SubactuadosДокумент7 страницSistemas SubactuadosSandoval DanielОценок пока нет
- Manual Del Usuario MSI CX62 6QDДокумент58 страницManual Del Usuario MSI CX62 6QDMrSnoid100% (1)
- Logica CableadaДокумент31 страницаLogica CableadaDiana PrietoОценок пока нет
- 1.2.9 Instructivo para Elaborar Manuales de ProcedimientosДокумент33 страницы1.2.9 Instructivo para Elaborar Manuales de ProcedimientosMarco TorresОценок пока нет
- Presentacion Deteccion de Fallas de ComputadorasДокумент49 страницPresentacion Deteccion de Fallas de ComputadorasJR LopezОценок пока нет
- Electronica AnalogicaДокумент15 страницElectronica AnalogicatonyОценок пока нет
- Investigación Sobre Trayectorias Paramétricas, Perfil Trapezoidal y Restricciones de TrayectoriasДокумент9 страницInvestigación Sobre Trayectorias Paramétricas, Perfil Trapezoidal y Restricciones de TrayectoriasLeonardo Romo100% (1)
- Control de Posicion de Un Motor de CD Con EncoderДокумент6 страницControl de Posicion de Un Motor de CD Con EncoderDewi Hdez GlezОценок пока нет
- Robot Cartesiano Tres EjesДокумент46 страницRobot Cartesiano Tres EjesEduardo VelazquezОценок пока нет
- Curso Básico de Mantenimiento SinaisДокумент134 страницыCurso Básico de Mantenimiento SinaisLUDWINGОценок пока нет
- Baston IneligenteДокумент10 страницBaston IneligenteMictamОценок пока нет
- Reporte Proyecto Seguidor y Sumobot 3kgДокумент15 страницReporte Proyecto Seguidor y Sumobot 3kgMiguel MartinezОценок пока нет
- Motores de Paso PDFДокумент19 страницMotores de Paso PDFChristian Camacho100% (1)
- Quaternions ArduinoДокумент6 страницQuaternions Arduinootis1988Оценок пока нет
- Reporte de Laboratorio Fisica 2Документ8 страницReporte de Laboratorio Fisica 2REBECA REYES HERNANDEZОценок пока нет
- Informe de Laboratorio de Fisica 2Документ10 страницInforme de Laboratorio de Fisica 2CR RaulОценок пока нет
- LCD27 Pr01 Br01Документ15 страницLCD27 Pr01 Br01Martínez Téllez Christian FernandoОценок пока нет
- Práctica 1 Cinematica y Dinamica FIДокумент12 страницPráctica 1 Cinematica y Dinamica FIAlfredo Ramirez100% (1)
- UntitledДокумент10 страницUntitledTito VilchezОценок пока нет
- Prac MRUAДокумент9 страницPrac MRUARaul FernandezОценок пока нет
- Practica1 Cinemática Fi UnamДокумент12 страницPractica1 Cinemática Fi UnamJosé Luis OlivaresОценок пока нет
- Asignación #4, Configuración EstructuralДокумент27 страницAsignación #4, Configuración EstructuralKiara Rachel SanchezОценок пока нет
- S06.s1-Esquema para PC1 (Material) 2022 MarzoДокумент3 страницыS06.s1-Esquema para PC1 (Material) 2022 MarzoAntony CortezОценок пока нет
- Adaptación Curricular para La Diversidad PDFДокумент24 страницыAdaptación Curricular para La Diversidad PDFMaria Alicia Soto AlvarezОценок пока нет
- Los Espacios Del Futuro - Marc Auge 1Документ5 страницLos Espacios Del Futuro - Marc Auge 1NSKLAОценок пока нет
- Brazos HidraulicoДокумент5 страницBrazos HidraulicoAnonymous Z1FMIglZqОценок пока нет
- Banco Abn Amro (Final)Документ16 страницBanco Abn Amro (Final)PaolaLoli100% (2)
- Tarifa 2021Документ298 страницTarifa 2021Marco Rodriguez FernandezОценок пока нет
- Redes TallerДокумент7 страницRedes TallerAndreqsОценок пока нет
- MaquinasДокумент8 страницMaquinasSantiago Albino Flores ChavarriaОценок пока нет
- Lizárraga Denisse Act2.Документ7 страницLizárraga Denisse Act2.denisseОценок пока нет
- Accion Correctiva HD Raloe PDFДокумент6 страницAccion Correctiva HD Raloe PDFAlex Vibora PeinadoОценок пока нет
- Santander-Sierra Parayas: Horario y Mapa de La Línea S2 de AutobúsДокумент5 страницSantander-Sierra Parayas: Horario y Mapa de La Línea S2 de AutobúsCésar García EguigurenОценок пока нет
- Basura InorganicaДокумент7 страницBasura InorganicaRikardo HReyОценок пока нет
- Introduccion A Las Finanzas..Документ5 страницIntroduccion A Las Finanzas..Juan Mauricio Borbón RoaОценок пока нет
- Fanny Acosta Cantero Mapa Actividad.1.1Документ6 страницFanny Acosta Cantero Mapa Actividad.1.1anon_577164224Оценок пока нет
- Acta 4 CMDRДокумент10 страницActa 4 CMDRLilianaОценок пока нет
- Simbologia de MarcadoДокумент11 страницSimbologia de MarcadoCharles Yumbato AnguloОценок пока нет
- Actividad 1-2Документ3 страницыActividad 1-2Marina TarnovskyОценок пока нет
- Introduccion A Las Finanzas Corporativas Estructura PDFДокумент20 страницIntroduccion A Las Finanzas Corporativas Estructura PDFpaopaotatianaОценок пока нет
- ¿Cómo Se Cierra Access 2010?Документ12 страниц¿Cómo Se Cierra Access 2010?Arantza PalmaОценок пока нет
- Klein Tools Desde 1957Документ402 страницыKlein Tools Desde 1957eliasfendiОценок пока нет
- Esta Es Una Representación Impresa de La Factura Electrónica, Generada en El Sistema de SUNAT. Puede Verificarla Utilizando Su Clave SOLДокумент1 страницаEsta Es Una Representación Impresa de La Factura Electrónica, Generada en El Sistema de SUNAT. Puede Verificarla Utilizando Su Clave SOLlaboratorioОценок пока нет
- Cadena de SuministroДокумент8 страницCadena de SuministroMelany ChingateОценок пока нет
- Tema 2 (Doc) - Introducción A La InvestigaciónДокумент12 страницTema 2 (Doc) - Introducción A La InvestigaciónStacy ArauzОценок пока нет
- Aceites y Grasas 2017 - IДокумент14 страницAceites y Grasas 2017 - IKaTiita SerQn0% (1)
- Ejemplo de Matriz de Consistencia y Operalizacion de VariablesДокумент7 страницEjemplo de Matriz de Consistencia y Operalizacion de VariablesJesus AlvaresОценок пока нет
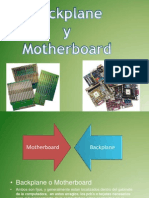
- Backplane y MotherboardДокумент11 страницBackplane y Motherboardemmanuel_sarmiento_1Оценок пока нет
- Proyecto de Investigación UNA PunoДокумент1 страницаProyecto de Investigación UNA PunoLuis SumerenteОценок пока нет