Вам также может понравиться
- Module 6 SlidesДокумент55 страницModule 6 Slidesyashar2500Оценок пока нет
- Module 7 SlidesДокумент54 страницыModule 7 Slidesyashar2500Оценок пока нет
- Module 2 SlidesДокумент35 страницModule 2 Slidesyashar2500Оценок пока нет
- Module 3 Slides PDFДокумент65 страницModule 3 Slides PDFyashar2500Оценок пока нет
- Module 1 SlidesДокумент44 страницыModule 1 Slidesyashar2500Оценок пока нет
- Combined Sliding Mode Control With A Feedback Linearization For Speed Control of Induction MotorДокумент6 страницCombined Sliding Mode Control With A Feedback Linearization For Speed Control of Induction MotorkandibanОценок пока нет
- Control of Mobile Robots: Glue Lectures: InstructorДокумент9 страницControl of Mobile Robots: Glue Lectures: Instructoryashar2500Оценок пока нет
- Programming & Simulation Lecture 7 SlidesДокумент11 страницProgramming & Simulation Lecture 7 Slidesyashar2500Оценок пока нет
- Quiz 6 SolutionsДокумент3 страницыQuiz 6 Solutionsyashar2500100% (2)
- Quiz 5 SolutionsДокумент5 страницQuiz 5 Solutionsyashar250067% (6)
- Quiz 3 SolutionsДокумент5 страницQuiz 3 Solutionsyashar250075% (4)
- Designing A Neuro PD With Gravity Compensation For Six Legged RobotДокумент8 страницDesigning A Neuro PD With Gravity Compensation For Six Legged RobotVishwanath KetkarОценок пока нет
- 03 LagrangianDynamics 1Документ28 страниц03 LagrangianDynamics 1Terence DengОценок пока нет
- Short-Term Motion Tracking Using Inexpensive Sensors: Filip Matzner, Roman BartákДокумент19 страницShort-Term Motion Tracking Using Inexpensive Sensors: Filip Matzner, Roman BartákderreОценок пока нет
- Sph4u Homework Motion in A Straight LineДокумент3 страницыSph4u Homework Motion in A Straight LineMichael CarnovaleОценок пока нет
- Physics 11Документ11 страницPhysics 11moorchehОценок пока нет
- Abstract. The Balancing of An Inverted Pendulum byДокумент5 страницAbstract. The Balancing of An Inverted Pendulum byFariz AhdiatamaОценок пока нет
- Sph4u Note Energy Analysis + Planetary MotionДокумент3 страницыSph4u Note Energy Analysis + Planetary MotionDavid HilbergОценок пока нет
- Chap02 Solutions Ex 2 4 CalculusДокумент20 страницChap02 Solutions Ex 2 4 CalculusAitazaz Ahsan100% (1)
- Chris Johnson - Limits and Continuity of Multivariable Functions PDFДокумент6 страницChris Johnson - Limits and Continuity of Multivariable Functions PDFogasofotiniОценок пока нет
- A Motion ControlДокумент6 страницA Motion ControlRonald CaravacaОценок пока нет
- Design of Mechatronics: Lecture # 01 Introduction To MechatronicsДокумент39 страницDesign of Mechatronics: Lecture # 01 Introduction To MechatronicsCr ZyОценок пока нет
- Continuity & DifferentiabilityДокумент3 страницыContinuity & DifferentiabilityJoydeep NaskarОценок пока нет
- Notes-Unit-1 - 1d Kinematics StudentДокумент12 страницNotes-Unit-1 - 1d Kinematics StudenttrucksrcoolОценок пока нет
- Model Predictive Control For UAVsДокумент24 страницыModel Predictive Control For UAVsJulio BVОценок пока нет
- Exam2005 2Документ19 страницExam2005 2kib67070% (1)
- Control System NOTESДокумент9 страницControl System NOTESSTUDENTS OF DOE CUSATОценок пока нет
- Quiz 7 SolutionsДокумент6 страницQuiz 7 Solutionsyashar2500100% (2)
- Self-Balancing Two-WheelerДокумент5 страницSelf-Balancing Two-WheelerVIVA-TECH IJRIОценок пока нет
- Tutorial III Root Locus DesignДокумент25 страницTutorial III Root Locus Designapi-3856083100% (3)
- StabilityДокумент16 страницStabilitythankamonyОценок пока нет
- SPH4U Dynamics Review WorksheetДокумент2 страницыSPH4U Dynamics Review WorksheetVincent GreesonОценок пока нет
- Physics Intro & KinematicsДокумент7 страницPhysics Intro & KinematicsGavie MarquosОценок пока нет
- Blyth Academy Sph4u Evaluation SchemeДокумент1 страницаBlyth Academy Sph4u Evaluation Schemeapi-253252566Оценок пока нет
- Modeling An Inverted PendulumДокумент45 страницModeling An Inverted Pendulumjunaid_honey83896770% (1)
- 183 - PR 23 - Foucault Pendulum AnalysisДокумент2 страницы183 - PR 23 - Foucault Pendulum AnalysisBradley NartowtОценок пока нет
- DH ParametersДокумент18 страницDH ParameterswasifazimОценок пока нет
- Poisson Equation DerivationДокумент4 страницыPoisson Equation DerivationSteven ScottОценок пока нет
- LQRДокумент14 страницLQRStefania Oliveira100% (1)
- Unit 2: Numerical Methods Branches: EEE/ECE/TCE/ML/IT: Solution of Algebraic and Transcendental EquationsДокумент10 страницUnit 2: Numerical Methods Branches: EEE/ECE/TCE/ML/IT: Solution of Algebraic and Transcendental EquationsNikhil Prasanna100% (2)
- Spatial Mechanisms Lecture NotesДокумент77 страницSpatial Mechanisms Lecture NotesErico Eric100% (1)
- 07 InvertedPendulumSystemДокумент10 страниц07 InvertedPendulumSystembgizachewОценок пока нет
- 1 Flexible Link ProjectДокумент15 страниц1 Flexible Link Projectprasaad08Оценок пока нет
- System Simulation Using Matlab, State Plane PlotsДокумент7 страницSystem Simulation Using Matlab, State Plane PlotsmosictrlОценок пока нет
- Chapter 2: Mathematical Modelling of Translational Mechanical SystemДокумент8 страницChapter 2: Mathematical Modelling of Translational Mechanical SystemNoor Nadiah Mohd Azali100% (1)
- Motivations of Fuzzy LogicДокумент3 страницыMotivations of Fuzzy Logicaleena_bcОценок пока нет
- Chapter 1 - KinematicsДокумент8 страницChapter 1 - KinematicsREXTERYXОценок пока нет
- Week 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Документ5 страницWeek 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Michael LiОценок пока нет
- Inverted PendulumДокумент4 страницыInverted PendulumFerbОценок пока нет
- Hw2sol PDFДокумент5 страницHw2sol PDFShy PeachD100% (1)
- Sph4U (Physics, Grade 12, University Preparation) Introductory and Preparative MaterialДокумент29 страницSph4U (Physics, Grade 12, University Preparation) Introductory and Preparative MaterialEdAnОценок пока нет
- Module5 PDFДокумент53 страницыModule5 PDFNurujjamanKhanОценок пока нет
- 5.updated Draft Review of Modern ControlДокумент72 страницы5.updated Draft Review of Modern ControlJason ChiangОценок пока нет
- ECP MagLev Model 730Документ2 страницыECP MagLev Model 730Jose AlejandroОценок пока нет
- Repetitive ControlДокумент22 страницыRepetitive ControlShri KulkarniОценок пока нет
- Eee4093 QFTДокумент43 страницыEee4093 QFTJames GillardОценок пока нет
- Control of DC Electric MotorДокумент16 страницControl of DC Electric MotorNa ChОценок пока нет
- Robust Adaptive Controller For Uncertain Nonlinear SystemsДокумент10 страницRobust Adaptive Controller For Uncertain Nonlinear SystemsijitcajournalОценок пока нет
- Trig Cheat Sheet ReducedДокумент2 страницыTrig Cheat Sheet ReducedMritunjay KumarОценок пока нет
- Physical Computing101: Part 3: Control of Mobile Robots: Hardware Lecture #7Документ8 страницPhysical Computing101: Part 3: Control of Mobile Robots: Hardware Lecture #7yashar2500Оценок пока нет
- Design ProcessesДокумент13 страницDesign Processesyashar2500Оценок пока нет
- Control of Mobile Robots: Glue Lectures: InstructorДокумент9 страницControl of Mobile Robots: Glue Lectures: Instructoryashar2500Оценок пока нет
- Programming & Simulation Lecture 7 SlidesДокумент11 страницProgramming & Simulation Lecture 7 Slidesyashar2500Оценок пока нет
- Physical Computing101: Part 2: Control of Mobile Robots: Hardware Lecture #6Документ7 страницPhysical Computing101: Part 2: Control of Mobile Robots: Hardware Lecture #6yashar2500Оценок пока нет
- Quiz 7 SolutionsДокумент6 страницQuiz 7 Solutionsyashar2500100% (2)
- Physical Computing101: Part 1: Control of Mobile Robots: Hardware Lecture #5Документ6 страницPhysical Computing101: Part 1: Control of Mobile Robots: Hardware Lecture #5yashar2500Оценок пока нет
- Quiz 6 SolutionsДокумент3 страницыQuiz 6 Solutionsyashar2500100% (2)
- Quiz 5 SolutionsДокумент5 страницQuiz 5 Solutionsyashar250067% (6)
- Sim.I.am - A Robot SimulatorДокумент27 страницSim.I.am - A Robot Simulatoryashar2500Оценок пока нет
- Quiz 4 SolutionsДокумент4 страницыQuiz 4 Solutionsjcvoscrib89% (9)
- Control of Mobile Robots: Glue Lectures: InstructorДокумент23 страницыControl of Mobile Robots: Glue Lectures: Instructoryashar2500Оценок пока нет
- Hardware Lecture 3 SlidesДокумент54 страницыHardware Lecture 3 Slidesyashar2500Оценок пока нет
- Quiz 3 SolutionsДокумент5 страницQuiz 3 Solutionsyashar250075% (4)
- Control of Mobile Robots: Glue Lectures: InstructorДокумент13 страницControl of Mobile Robots: Glue Lectures: Instructoryashar2500Оценок пока нет
- Programming & Simulation Lecture 1 SlidesДокумент8 страницProgramming & Simulation Lecture 1 Slidesyashar2500Оценок пока нет
- Ice Slurry W Solar Cooling PDFДокумент6 страницIce Slurry W Solar Cooling PDFMattia ParentiОценок пока нет
- Control Valve HandbookДокумент236 страницControl Valve HandbookTon Blok100% (1)
- Outline of G4Ds Functions and Structure: Summary: The Simulation Tool Uses The Darkside Program'S Detectors (Darkside-10Документ8 страницOutline of G4Ds Functions and Structure: Summary: The Simulation Tool Uses The Darkside Program'S Detectors (Darkside-10ShayОценок пока нет
- Manualwise: Designing Beam CopesДокумент4 страницыManualwise: Designing Beam CopesspaceheaterОценок пока нет
- Physics Paper 1 Term 1 2015 - Y11Документ17 страницPhysics Paper 1 Term 1 2015 - Y11Ezra Loganathan MuniandiОценок пока нет
- Formulas and Reference Chart EocДокумент3 страницыFormulas and Reference Chart Eocapi-87739323Оценок пока нет
- MECH3780 Fluid Mechanics 2 and CFDДокумент14 страницMECH3780 Fluid Mechanics 2 and CFDninibearОценок пока нет
- RPH ChemДокумент3 страницыRPH ChemNur Hidayah IsmailОценок пока нет
- Exergy Analysis of Rankine Cycle & STPPДокумент18 страницExergy Analysis of Rankine Cycle & STPPNouman KhalidОценок пока нет
- Converting Dynamic Impact Events To Equivalent Static Loads in Vehicle ChassisДокумент62 страницыConverting Dynamic Impact Events To Equivalent Static Loads in Vehicle ChassisRm1262Оценок пока нет
- List of Courses-SemV VIIДокумент2 страницыList of Courses-SemV VIIAakash VermaОценок пока нет
- 3 PDFДокумент710 страниц3 PDFMaxe PayneОценок пока нет
- Design Pull RodДокумент1 страницаDesign Pull RodSACHINОценок пока нет
- Microwave SpectrosДокумент46 страницMicrowave Spectros5fdt78kgscОценок пока нет
- Discussion of The Propeller-Assisted Straight-Downwind Land Sailing Faster Than WindДокумент9 страницDiscussion of The Propeller-Assisted Straight-Downwind Land Sailing Faster Than WindFavio Alejandro Herrera ZapataОценок пока нет
- Chapter 1Документ19 страницChapter 1raghu ramОценок пока нет
- Eee - III & IV Sem Syllabus-2013-1Документ34 страницыEee - III & IV Sem Syllabus-2013-1Aaditya Vignyan VellalaОценок пока нет
- Physics Volume 3Документ370 страницPhysics Volume 3Sunilkumar Dubey100% (1)
- Transient Considerations of Flat-Plate Solar CollectorsДокумент5 страницTransient Considerations of Flat-Plate Solar CollectorsmangouarОценок пока нет
- HURDCO International SchoolДокумент3 страницыHURDCO International SchoolWakif Khan PrantoОценок пока нет
- Introduction and Basic Concepts: Mohamed ElgabailiДокумент51 страницаIntroduction and Basic Concepts: Mohamed ElgabailiMohammed AlryaniОценок пока нет
- E102 KinematicsДокумент8 страницE102 KinematicsKenneth PeraОценок пока нет
- Explain Briefly The Evaporation ProcessДокумент4 страницыExplain Briefly The Evaporation ProcessChristian GarciaОценок пока нет
- Magnetic Particle Testing Procedure Song Ngu PDFДокумент24 страницыMagnetic Particle Testing Procedure Song Ngu PDFTrung Tinh Ho100% (1)
- Chapter 13 States of MatterДокумент14 страницChapter 13 States of MatterbsmithfraneyОценок пока нет
- E2192-13 Guía Estándar para Dimensionamiento de Altura Plana de Defectos Por UltrasonidosДокумент23 страницыE2192-13 Guía Estándar para Dimensionamiento de Altura Plana de Defectos Por Ultrasonidosfredy lopezОценок пока нет
- Introduction To Magnetic Particle Testing: Basic ConceptsДокумент3 страницыIntroduction To Magnetic Particle Testing: Basic ConceptsAshfaq KhanОценок пока нет
- NaturalConvectionHeatTransferCoefficients SI Units Final ProtectedДокумент44 страницыNaturalConvectionHeatTransferCoefficients SI Units Final ProtectedFabio MiguelОценок пока нет
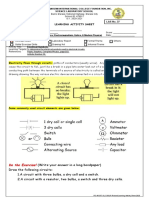
- Learning Activity Sheet: Do The Exercise!Документ9 страницLearning Activity Sheet: Do The Exercise!Najmah Sirad AmpaОценок пока нет
- Simplified Method of Heat Calculations of Oil-Air Heat ExchangersДокумент9 страницSimplified Method of Heat Calculations of Oil-Air Heat ExchangersAsad KhanОценок пока нет