Вам также может понравиться
- Bunker1 PDFДокумент1 страницаBunker1 PDFmpveraviОценок пока нет
- Meat Ds - Disc+Dryer EsДокумент4 страницыMeat Ds - Disc+Dryer Esmpveravi100% (1)
- TSM 1400 Es-EmДокумент24 страницыTSM 1400 Es-EmmpveraviОценок пока нет
- JUNTAS-ROTATIVAS-SIFONES-Oct-2021 BДокумент4 страницыJUNTAS-ROTATIVAS-SIFONES-Oct-2021 BmpveraviОценок пока нет
- 358025Документ19 страниц358025Jesus Chucho GonzalezОценок пока нет
- 125 Tarea-01Документ4 страницы125 Tarea-01mpveraviОценок пока нет
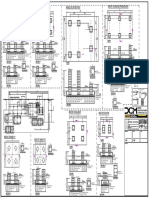
- Base de Hormigón Tanque N°1 Base de Hormigón Tanque N°2 Base de Filtro Rotativo Base N°1 Sistema de PresurizacionДокумент1 страницаBase de Hormigón Tanque N°1 Base de Hormigón Tanque N°2 Base de Filtro Rotativo Base N°1 Sistema de PresurizacionmpveraviОценок пока нет
- Notificación de Infracción de Tránsito Y Requerimiento de Pago VoluntarioДокумент2 страницыNotificación de Infracción de Tránsito Y Requerimiento de Pago VoluntariompveraviОценок пока нет
- 699 1239 1 PBДокумент9 страниц699 1239 1 PBbarnyamadorОценок пока нет
- 699 1239 1 PBДокумент9 страниц699 1239 1 PBbarnyamadorОценок пока нет
- Fish Ds - Fish+Cooker EsДокумент4 страницыFish Ds - Fish+Cooker EsmpveraviОценок пока нет
- Fish-Ds - Tube Bundle Dryer-EsДокумент4 страницыFish-Ds - Tube Bundle Dryer-EsmpveraviОценок пока нет
- Flujo de AceiteДокумент1 страницаFlujo de AceitempveraviОценок пока нет
- LED Hermética: 7 Años de VidaДокумент1 страницаLED Hermética: 7 Años de VidampveraviОценок пока нет
- Principios Basicos Grasas Lubricantes ESДокумент21 страницаPrincipios Basicos Grasas Lubricantes ESEsteban Fernando Meza IbacetaОценок пока нет
- F-INOX ES 60HzДокумент6 страницF-INOX ES 60HzmpveraviОценок пока нет
- Sistema de Pintado para Plantas PesquerasДокумент1 страницаSistema de Pintado para Plantas PesquerasmpveraviОценок пока нет
- ENSAMBLE SECADOR2 Modelo PDFДокумент1 страницаENSAMBLE SECADOR2 Modelo PDFmpveraviОценок пока нет
- VX ES 60HzДокумент4 страницыVX ES 60HzmpveraviОценок пока нет
- Linea AceiteДокумент1 страницаLinea AceitempveraviОценок пока нет
- ISOMETRICO 5 MM PDFДокумент2 страницыISOMETRICO 5 MM PDFmpveraviОценок пока нет
- 12Документ2 страницы12mpveraviОценок пока нет
- 10Документ4 страницы10mpveraviОценок пока нет
- Fruto Tera PiaДокумент25 страницFruto Tera PiaEcp CastiОценок пока нет
- AguaДокумент1 страницаAguampveraviОценок пока нет
- 11Документ4 страницы11mpveraviОценок пока нет
- BunkerДокумент1 страницаBunkermpveraviОценок пока нет
- Dibujo1 ModelДокумент1 страницаDibujo1 ModelmpveraviОценок пока нет
- OxifinДокумент1 страницаOxifinmpveraviОценок пока нет
- Norma NFPA 704 PDFДокумент3 страницыNorma NFPA 704 PDFFernando Vallejos100% (1)
- 01 Wirtgen Gama Completa ProductosДокумент20 страниц01 Wirtgen Gama Completa ProductosMaría Fernanda ReyesОценок пока нет
- Razones y ProporcionesДокумент8 страницRazones y ProporcionesdarksatyОценок пока нет
- Tesis IeeeДокумент20 страницTesis IeeeHumberto Paul LopezОценок пока нет
- EstadisticaДокумент7 страницEstadisticaFil Melchor Chavez58% (12)
- Aparejos Basicos para El Manejo de CuerdasДокумент32 страницыAparejos Basicos para El Manejo de CuerdasJuan David AceroОценок пока нет
- Segundo Trabajo de Fisica IIIДокумент13 страницSegundo Trabajo de Fisica IIILuis GarridoОценок пока нет
- Factores de Conversión Del TiempoДокумент4 страницыFactores de Conversión Del Tiempopcpc4565100% (1)
- La Vision, La Luz y El Clima Luminoso PDFДокумент28 страницLa Vision, La Luz y El Clima Luminoso PDFAlexandraRodriguezОценок пока нет
- Laboratorio 3 - Fisica-Uni FiaДокумент18 страницLaboratorio 3 - Fisica-Uni FiaSTALIN GAMARRA GOMEZ100% (1)
- Trabajo Concreto Armado 1Документ1 страницаTrabajo Concreto Armado 1jorge bustamanteОценок пока нет
- Informe de Procesos TermodinámicosДокумент8 страницInforme de Procesos TermodinámicosjuanfelipeОценок пока нет
- Español Fabricar o Tijolo Ecologico - Pt.esДокумент54 страницыEspañol Fabricar o Tijolo Ecologico - Pt.esEsau CuevaОценок пока нет
- Fase 3 StevensonДокумент11 страницFase 3 StevensonStevenson Valencia S100% (1)
- Vigas Isostatica e Hiperestaticas - (PDF Document) .HTMLДокумент27 страницVigas Isostatica e Hiperestaticas - (PDF Document) .HTMLwendy quispeОценок пока нет
- FT-DeX-03-004 Requisitos para Conexión de Proyectos Con Expansión v3Документ4 страницыFT-DeX-03-004 Requisitos para Conexión de Proyectos Con Expansión v3duvan355Оценок пока нет
- Identificación P-Nitrofenol Mediante Espectroscopia Ir y RMNДокумент5 страницIdentificación P-Nitrofenol Mediante Espectroscopia Ir y RMNluisa santaОценок пока нет
- Poema Del FinДокумент5 страницPoema Del FinRodolfo Yafté C. HernandezОценок пока нет
- Densidad - MonedasДокумент3 страницыDensidad - MonedasSergioAndresHerreraОценок пока нет
- Concepto de Geografia PensamientoДокумент10 страницConcepto de Geografia PensamientoSofia GonzalezОценок пока нет
- Cal HidráulicaДокумент7 страницCal HidráulicaMarco Antonio Ramos RodriguezОценок пока нет
- Práctica No. 11 Cromat. en PapelДокумент15 страницPráctica No. 11 Cromat. en PapelEduardo Camas'Оценок пока нет
- Centrifugación - Problemas 29 de MayoДокумент1 страницаCentrifugación - Problemas 29 de MayoMartha MontoyaОценок пока нет
- Caso Practico Unidad 3 Matemáticas AplicadasДокумент7 страницCaso Practico Unidad 3 Matemáticas Aplicadasmiguel lermaОценок пока нет
- Química - 3er AñoДокумент10 страницQuímica - 3er AñoHender Iker Llauce ChapoñanОценок пока нет
- Plan de Trabajo 5858-086B REV FSM2Документ31 страницаPlan de Trabajo 5858-086B REV FSM2Georgina Apaza SalasОценок пока нет
- Fibras para ConcretoДокумент8 страницFibras para ConcretoAlejandroОценок пока нет
- Hidrodi Ejercicios 04Документ9 страницHidrodi Ejercicios 04miggtyjОценок пока нет
- 052 Newmans Newco API 600 CAST STEEL MANUAL en ESPAÑOLДокумент28 страниц052 Newmans Newco API 600 CAST STEEL MANUAL en ESPAÑOLJorge Enrique Moreno PОценок пока нет
- Helbert GaldosДокумент17 страницHelbert Galdossnarf273100% (1)
- 3.4 Especif. Polimericos Tipo SuspensionДокумент9 страниц3.4 Especif. Polimericos Tipo SuspensionRosmer Ocando MoralesОценок пока нет