Вам также может понравиться
- IntroSAL2Assignment2 Control of Thermal Power PlantДокумент27 страницIntroSAL2Assignment2 Control of Thermal Power PlantabdillahОценок пока нет
- Systems of Surveillance of Dynamic ProcessesДокумент13 страницSystems of Surveillance of Dynamic ProcessesnickОценок пока нет
- Modeling and SimulationДокумент33 страницыModeling and Simulationabdul wakeelОценок пока нет
- Frequency Response Analysis and Design PDFДокумент281 страницаFrequency Response Analysis and Design PDFfergusoniseОценок пока нет
- Lecture 1-IntroductionДокумент22 страницыLecture 1-IntroductionShreyansh SaraswatОценок пока нет
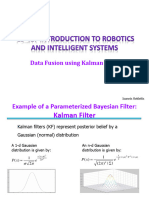
- 15 KalmanFilterДокумент49 страниц15 KalmanFilterTim (Dipayan) MazumdarОценок пока нет
- Lecture 3 - 2Документ42 страницыLecture 3 - 2faruktokuslu16Оценок пока нет
- Week1 Elec372Документ9 страницWeek1 Elec372mantaptoОценок пока нет
- T7 - State Feedback Analysis and Design - 2021Документ35 страницT7 - State Feedback Analysis and Design - 2021James ChanОценок пока нет
- Feedback Control: Massachusetts Institute of Technology Subject 2.017Документ12 страницFeedback Control: Massachusetts Institute of Technology Subject 2.017Dr. Ir. R. Didin Kusdian, MT.Оценок пока нет
- LQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapiroДокумент41 страницаLQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapirorameshsmeОценок пока нет
- Athans Workshop 10 07Документ40 страницAthans Workshop 10 07Anonymous JvDVQVОценок пока нет
- Mechatronics Frequency Response Analysis & Design K. Craig 1Документ121 страницаMechatronics Frequency Response Analysis & Design K. Craig 1rub786Оценок пока нет
- Lecture 1 2-IntroductionДокумент36 страницLecture 1 2-Introductionjanderson13Оценок пока нет
- Introduction To State Space Analysis: UNIT-05Документ62 страницыIntroduction To State Space Analysis: UNIT-05MD SHAHRIARMAHMUDОценок пока нет
- Where Are We ?Документ18 страницWhere Are We ?HenryNielsenОценок пока нет
- LQG DesignДокумент20 страницLQG DesignMahmoud AbuziadОценок пока нет
- Signals and Systems: by P. Gokul KrishnaДокумент15 страницSignals and Systems: by P. Gokul KrishnakrishnaОценок пока нет
- NLS Module3Документ74 страницыNLS Module3Nidhin ChandranОценок пока нет
- Block Diagram and StabilityДокумент101 страницаBlock Diagram and Stabilityhasan bishОценок пока нет
- Lecture 1a Introduction CH 1Документ17 страницLecture 1a Introduction CH 1api-27535945Оценок пока нет
- L01 - IntroductionДокумент14 страницL01 - IntroductionAndrea RiccobeneОценок пока нет
- Jay H Lee - MPC Lecture NotesДокумент137 страницJay H Lee - MPC Lecture NotesVnomiksОценок пока нет
- Transient Response AnalysisДокумент23 страницыTransient Response AnalysisAsif JavedОценок пока нет
- Chapter 2-1 PDFДокумент70 страницChapter 2-1 PDFtazeb100% (2)
- SMC InstructionsДокумент3 страницыSMC Instructionsgodspower brunoОценок пока нет
- Control System MidtermДокумент19 страницControl System MidtermSumangil, Maria Margarita P.Оценок пока нет
- Control Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectДокумент157 страницControl Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriОценок пока нет
- Time Response AnalysisДокумент37 страницTime Response Analysis7014KANISHKA JAISWALОценок пока нет
- KalmanДокумент23 страницыKalmanMuhammad HaroonОценок пока нет
- Optimal Control: Solmaz S. KiaДокумент43 страницыOptimal Control: Solmaz S. Kiaprasaath VRОценок пока нет
- 8 Control Basics PDFДокумент79 страниц8 Control Basics PDFshihabОценок пока нет
- Chapter 1. Digital Control System-1Документ79 страницChapter 1. Digital Control System-1Dereje Shiferaw100% (1)
- Laplace TTДокумент56 страницLaplace TTFares AlghamdiОценок пока нет
- Adaptive DP For Discrete Time LQR Optimal Tracking Control Problems With Unknown DynamicsДокумент6 страницAdaptive DP For Discrete Time LQR Optimal Tracking Control Problems With Unknown Dynamicssree pradhaОценок пока нет
- GmailДокумент24 страницыGmailHriday SachdevОценок пока нет
- Numerical Stability of Explicit Integration MethodsДокумент6 страницNumerical Stability of Explicit Integration MethodsadauОценок пока нет
- Automatic Control 2 (Mathematical Foundation)Документ103 страницыAutomatic Control 2 (Mathematical Foundation)kimeepark0311Оценок пока нет
- Nonlinear Analysis and TyperДокумент56 страницNonlinear Analysis and TyperyashbhoyarОценок пока нет
- Second-Order Dynamic Systems KCC 2011Документ39 страницSecond-Order Dynamic Systems KCC 2011Naguib NurОценок пока нет
- Advanced Control Theory: Dr. V. R. Jisha, Associate Professor, Dept. of Electrical Engg., CETДокумент50 страницAdvanced Control Theory: Dr. V. R. Jisha, Associate Professor, Dept. of Electrical Engg., CETarjungangadharОценок пока нет
- Transfer Function - Poles and Zeros - StabilityДокумент9 страницTransfer Function - Poles and Zeros - Stability666667Оценок пока нет
- Stabilization and Control Over Gaussian NetworksДокумент48 страницStabilization and Control Over Gaussian NetworksFan ZhangОценок пока нет
- EEE221 Lec2 PDFДокумент62 страницыEEE221 Lec2 PDFMd. Nazmul Huda 1610805643Оценок пока нет
- Comparison of LQRДокумент6 страницComparison of LQRʚɞ Kwon Boa ʚɞОценок пока нет
- Unit 02Документ85 страницUnit 02MD SHAHRIARMAHMUDОценок пока нет
- Control Systems: Module: Modelling of SystemsДокумент19 страницControl Systems: Module: Modelling of Systemsee210002004Оценок пока нет
- Linear Quadratic Regulator (LQR) State Feedback Design: R T U R T X XДокумент10 страницLinear Quadratic Regulator (LQR) State Feedback Design: R T U R T X Xpraveen3530Оценок пока нет
- M9 Time ResponseДокумент21 страницаM9 Time ResponseKhaled AlshurmanОценок пока нет
- Petri NetsДокумент122 страницыPetri Netscreativechand100% (8)
- Sufficient Conditions For Invariance ControlДокумент6 страницSufficient Conditions For Invariance Controllenoirstephane42Оценок пока нет
- TA CONTROL-LOOP v1Документ5 страницTA CONTROL-LOOP v1Jorge Garcia AbadОценок пока нет
- The Linear Quadratic Regular Algorithm-Based Control System of The Direct Current MotorДокумент8 страницThe Linear Quadratic Regular Algorithm-Based Control System of The Direct Current MotorVượng Nguyễn VănОценок пока нет
- What Are Signals and SystemsДокумент4 страницыWhat Are Signals and SystemsKeri Gobin SamarooОценок пока нет
- Digital Control SystemДокумент11 страницDigital Control SystemAkash A KollamparampilОценок пока нет
- Nonlinear Control Feedback Linearization Sliding Mode ControlОт EverandNonlinear Control Feedback Linearization Sliding Mode ControlОценок пока нет
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsОт EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodОт EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodОценок пока нет
- A State-Space Modeling of Non - IdealДокумент8 страницA State-Space Modeling of Non - IdealPartha SarathyОценок пока нет
- Tuning of Conventional Pid and Fuzzy Logic Controller Using Different Defuzzification TechniquesДокумент5 страницTuning of Conventional Pid and Fuzzy Logic Controller Using Different Defuzzification TechniquesiamjithinjoseОценок пока нет
- SSM BoostДокумент8 страницSSM BoostBenish CmОценок пока нет
- Robust PID Controller Design For Nonlinear Systems: Part IIДокумент28 страницRobust PID Controller Design For Nonlinear Systems: Part IIEngr Nayyer Nayyab MalikОценок пока нет
- Circuit Protection AnДокумент6 страницCircuit Protection AnBoykaYoriОценок пока нет
- Mencoba BerbagiДокумент10 страницMencoba BerbagimelziambarОценок пока нет
- DocumentДокумент87 страницDocumentAshwani RanaОценок пока нет