Академический Документы
Профессиональный Документы
Культура Документы
Safety VKR C4 Es
Загружено:
kukaАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Safety VKR C4 Es
Загружено:
kukaАвторское право:
Доступные форматы
KUKA Roboter GmbH
Seguridad de los robots industriales
Con VKR C4
Edicin: 05.09.2012
Versin: Safety VKR C4 V5 es (PDF)
Seguridad de los robots industriales
Copyright 2012
KUKA Roboter GmbH
Zugspitzstrae 140
D-86165 Augsburg
Alemania
La reproduccin de esta documentacin o parte de ella o su facilitacin a terceros solamente est
permitida con expresa autorizacin del KUKA Roboter GmbH.
Adems del volumen descrito en esta documentacin, pueden existir funciones en condiciones de
funcionamiento. El usuario no adquiere el derecho sobre estas funciones en la entrega de un aparato
nuevo, ni en casos de servicio.
Hemos controlado el contenido del presente escrito en cuanto a la concordancia con la descripcin
del hardware y el software. An as, no pueden excluirse totalmente todas las divergencias, de modo
tal, que no aceptamos responsabilidades respecto a la concordancia total. Pero el contenido de estos escritos es controlado periodicamente, y en casos de divergencia, stas son enmendadas y presentadas correctamente en la edicin siguiente.
Reservados los derechos a modificaciones tcnicas que no tengan influencia en el funcionamiento.
Traduccin de la documentacin original
KIM-PS5-DOC
2 / 35
Publicacin:
Pub Sicherheit VKR C4 es
Estructura de libro:
Sicherheit VKR C4 V4.1
Versin:
Safety VKR C4 V5 es (PDF)
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
Indice
Indice
1
Introduccin .................................................................................................
1.1
Representacin de observaciones .............................................................................
Seguridad .....................................................................................................
2.1
Generalidades ............................................................................................................
2.1.1
Observaciones sobre responsabilidades ..............................................................
2.1.2
Uso conforme a lo previsto del robot industrial .....................................................
2.1.3
Declaracin de conformidad de la CE y declaracin de montaje .........................
2.1.4
Trminos utilizados ...............................................................................................
2.2
Personal .....................................................................................................................
11
2.3
Campos y zonas de trabajo, proteccin y de peligro .................................................
12
2.4
Causa de reacciones de parada ................................................................................
13
2.5
Funciones de seguridad .............................................................................................
14
2.5.1
Resumen de las funciones de seguridad ..............................................................
14
2.5.2
Control de seguridad ............................................................................................
15
2.5.3
Seleccin de modos de servicio ...........................................................................
15
2.5.4
Proteccin del operario .........................................................................................
16
2.5.5
Dispositivo de PARADA DE EMERGENCIA ........................................................
16
2.5.6
Cerrar sesin del control de seguridad superior ...................................................
17
2.5.7
Dispositivo externo de PARADA DE EMERGENCIA ...........................................
17
2.5.8
Pulsador de hombre muerto .................................................................................
17
2.5.9
Dispositivo de validacin externo .........................................................................
18
2.5.10
Parada de servicio externa segura .......................................................................
18
2.5.11
Parada de seguridad externa 1 y parada de seguridad externa 2 ........................
18
2.5.12
Control de velocidad en T1 ...................................................................................
19
Equipamiento de proteccin adicional .......................................................................
19
2.6.1
Modo tecleado ......................................................................................................
19
2.6.2
Finales de carrera software ..................................................................................
19
2.6.3
Topes finales mecnicos ......................................................................................
19
2.6.4
Limitacin mecnica de la zona del eje (opcin) ..................................................
19
2.6.5
Control de zona del eje (opcin) ...........................................................................
20
2.6.6
Dispositivo de liberacin (opcional) ......................................................................
20
2.6.7
Identificaciones en el robot industrial ....................................................................
21
2.6.8
Dispositivos de seguridad externos ......................................................................
21
2.7
Resumen de los modos de servicio y de las funciones de proteccin .......................
22
2.8
Medidas de seguridad ................................................................................................
22
2.8.1
Medidas generales de seguridad ..........................................................................
22
2.8.2
Transporte ............................................................................................................
23
2.8.3
Puesta en servicio y reanudacin del servicio ......................................................
24
2.8.3.1
Modo de puesta en servicio ..................................................................................
25
2.8.4
Modo de servicio manual ......................................................................................
26
2.8.5
Simulacin ............................................................................................................
27
2.8.6
Modo de servicio automtico ................................................................................
28
2.8.7
Mantenimiento y reparaciones ..............................................................................
28
2.8.8
Puesta fuera de servicio, almacenamiento y eliminacin de residuos .................
29
2.8.9
Medidas de seguridad para el "Single Point of Control" .......................................
30
Normas y prescripciones aplicadas ...........................................................................
31
2.6
2.9
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
3 / 35
Seguridad de los robots industriales
Indice ............................................................................................................
4 / 35
33
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
1 Introduccin
Introduccin
1.1
Representacin de observaciones
Seguridad
Estas observaciones son de seguridad y se deben tener en cuenta.
Estas observaciones indican que, si no se toma ninguna medida de precaucin, es problable o completamente seguro que se produzcan lesiones graves o incluso la muerte.
Estas observaciones indican que, si no se toma ninguna medida de precaucin, pueden producirse lesiones graves o incluso la muerte.
Estas observaciones indican que, si no se toman las
debidas medidas de precaucin, pueden producirse
lesiones leves.
Estas observaciones indican que, si no se toma ninguna medida de precaucin, pueden producirse daos materiales.
Estas observaciones remiten a informacin relevante para la seguridad o a medidas de seguridad generales. Estas observaciones no
hacen referencia a peligros o medidas de precaucin concretos.
Observaciones
Esta observacin sirve para facilitar el trabajo o contiene remisiones a informacin que aparece ms adelante.
Observacin que sirve para facilitar el trabajo o remite a informacin
que aparece ms adelante.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
5 / 35
Seguridad de los robots industriales
6 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
Seguridad
2.1
Generalidades
2.1.1
Observaciones sobre responsabilidades
El equipo descrito en el presente documento es un robot industrial o uno de
sus componentes.
Componentes del robot industrial:
Manipulador
Unidad de control del robot
Unidad manual de programacin
Cables de unin
Ejes adicionales (opcional)
p. ej. unidad lineal, mesa giratoria basculante, posicionador
Software
Opciones, accesorios
El robot industrial se ha construido de conformidad con el nivel tecnolgico actual y con las normas tcnicas reconocidas en materia de seguridad. No obstante, en caso de uso indebido puede haber riesgo de lesiones, incluso peligro
de muerte, as como riesgo de daos materiales en el robot industrial o en
otros.
El robot industrial debe ser utilizado slo en perfecto estado tcnico y para los
fines previstos, respetando las normas de seguridad y a sabiendas de los peligros que puedan emanar. La utilizacin debe realizarse bajo consideracin
del presente documento y de la declaracin de montaje del robot industrial,
que se adjunta en el suministro. Cualquier fallo que pueda afectar a la seguridad deber subsanarse de inmediato.
Informacin
sobre la
seguridad
Las indicaciones sobre seguridad no pueden ser interpretadas en contra del
KUKA Roboter GmbH. An cuando se hayan respetado todas las indicaciones sobre seguridad, no puede garantizarse que el robot industrial no provoque algn tipo de lesin o dao.
Sin la debida autorizacin de KUKA Roboter GmbH no deben efectuarse modificaciones en el robot industrial. Es posible integrar componentes adicionales (tiles, software, etc.) en el sistema del robot industrial que no pertenecen
al volumen de suministro de KUKA Roboter GmbH. Si debido a la integracin
de dichos componentes el robot industrial u otros bienes materiales sufren daos, la responsabilidad es del usuario.
Adems del captulo sobre seguridad, la presente documentacin contiene
otras indicaciones de seguridad que debe respetarse obligatoriamente.
2.1.2
Uso conforme a lo previsto del robot industrial
El robot industrial est nica y exclusivamente diseado para el uso descrito
en el captulo "Uso previsto" del manual de manejo o de las instrucciones de
montaje.
Para ms informacin, consultar el captulo "Uso previsto" de las instrucciones de manejo o de montaje del robot industrial.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
7 / 35
Seguridad de los robots industriales
Todo uso distinto al indicado se considerar como uso incorrecto y no estar
permitido. El fabricante no asume ninguna responsabilidad por los daos que
pudieran derivarse de ello. El riesgo lo lleva solamente el usuario.
Al uso conforme a los fines previstos pertenece tambin la observacin de las
instrucciones de servicio y de montaje de los componentes individuales, y, sobre todo, el cumplimiento de las prescripciones de mantenimiento.
Uso incorrecto
2.1.3
Todas las utilizaciones que difieran del uso previsto se consideran usos incorrectos y no estn permitidos. Entre ellos, p. ej.:
Transporte de personas o animales
Utilizacin como medio auxiliar de elevacin
Utilizacin fuera de los lmites de servicio permitidos
Utilizacin en ambientes con riesgo de explosin
Instalacin de dispositivos de proteccin adicionales
Instalacin al aire libre
Utilizacin bajo tierra
Declaracin de conformidad de la CE y declaracin de montaje
De acuerdo con la directiva europea sobre construccin de mquinas, este robot industrial se considera una mquina incompleta. El robot industrial slo
puede ponerse en servicio cuando se cumplen los requisitos siguientes:
que el robot industrial est integrado en una instalacin
o que el robot industrial conforma una instalacin junto con otras mquinas
o que el robot industrial est completado con todas las funciones de seguridad y dispositivos de proteccin necesarios para ser considerado una
mquina completa de acuerdo con la directiva europea de construccin de
maquinaria.
Declaracin de
conformidad
La instalacin cumpla con los requisitos de la directiva europea de construccin de maquinaria, lo cual est comprobado con un proceso de evaluacin de la conformidad.
El integrador del sistema debe redactar una declaracin de conformidad para
toda la instalacin de acuerdo con la normativa sobre construccin de mquinas. La declaracin de conformidad es fundamental para la concesin de la
marca CE para la instalacin. El robot industrial debe operarse siempre de
conformidad con las leyes, prescripciones y normas especficas del pas.
El control del robot posee una certificacin CE de acuerdo con la normativa
MFC y la normativa sobre instalaciones de baja tensin.
Declaracin de
montaje
El robot industrial, en calidad de mquina incompleta, se suministra con una
declaracin de montaje de acuerdo con el anexo II B de la directiva sobre mquinas 2006/42/CE. Forma parte de esta declaracin de montaje un listado
con los requisitos bsicos cumplidos segn el anexo I y las instrucciones de
montaje.
La declaracin de montaje declara que est prohibida la puesta en servicio de
la mquina incompleta mientras sta no se monte o se integre, con la ayuda
de otras piezas, en una mquina que cumpla con las disposiciones de la directiva europea sobre mquinas y con la declaracin de conformidad CE segn el anexo II A.
El integrador de sistemas debe guardar la declaracin de montaje con sus
anexos como parte de la documentacin tcnica de la mquina completa.
8 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
2.1.4
Trminos utilizados
STOP 0, STOP 1 y STOP 2 son definiciones de parada segn EN 602041:2006.
Trmino
Descripcin
Campo del eje
Zona en grados o milmetros en la que se puede mover cada uno de los
ejes. El campo del eje debe definirse para cada eje.
Distancia de parada
Distancia de parada = distancia de reaccin + distancia de frenado
La distancia de parada forma parte de la zona de peligro.
Zona de trabajo
La zona de trabajo es aquella en la que se puede mover el manipulador.
La zona de trabajo se obtiene a partir de la suma de cada uno de los
campos del eje.
Explotador
(usuario)
El explotador de un robot industrial puede ser el empresario, el contratante o una persona delegada responsable de la utilizacin del robot
industrial.
Zona de peligro
La zona de peligro est compuesta por la zona de trabajo y las distancias de parada.
Vida til
La vida til de un componente relevante para la seguridad comienza en
el momento del suministro de la pieza al cliente.
La vida til no se ve afectada por la utilizacin o no de la pieza en una
unidad de control del robot o en otra parte, ya que los componentes
relevantes para la seguridad tambin envejecen durante el almacenamiento.
KCP
La unidad manual de programacin KCP (KUKA Control Panel) contiene todas las funciones de control y visualizacin necesarias para el
servicio y la programacin del robot industrial.
La variante de KCP para el KR C4 recibe el nombre de KUKA smartPAD. No obstante, en la presente documentacin se usa por lo general
la denominacin general KCP.
Manipulador
La mecnica del robot y la instalacin elctrica pertinente
Zona de seguridad
La zona de seguridad se encuentra fuera de la zona de peligro.
Parada de servicio
segura
La parada de servicio segura es un control de parada. No detiene el
movimiento del robot, sino que controla si los ejes del robot se detienen.
En caso de que se muevan durante la parada de servicio segura, se
activa una parada de seguridad STOP 0.
La parada de servicio segura tambin se puede accionar desde el exterior.
Cuando se acciona una parada de servicio segura, la unidad de control
del robot establece una salida para el bus de campo. Esta salida tambin se establece si en el momento en el que se acciona la parada de
servicio segura no todos los ejes estn parados y, por tanto, se activa
una parada de seguridad STOP 0.
Parada de seguridad
STOP 0
Una parada que se acciona y ejecuta desde el control de seguridad. El
control de seguridad desconecta de inmediato los accionamientos y la
alimentacin de tensin de los frenos.
Indicacin: en la presente documentacin esta parada recibe el nombre de parada de seguridad 0.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
9 / 35
Seguridad de los robots industriales
Trmino
Descripcin
Parada de seguridad
STOP 1
Una parada que se acciona y controla desde el control de seguridad. El
procedimiento de frenado se ejecuta con un componente de la unidad
de control del robot no destinado a la seguridad y controlado a travs
del control de seguridad. En el momento en que el manipulador se para,
el control de seguridad desconecta los accionamientos y la alimentacin
de tensin de los frenos.
Cuando se acciona una parada de seguridad STOP 1, la unidad de control del robot establece una salida para el bus de campo.
La parada de seguridad STOP 1 tambin se puede accionar desde el
exterior.
Indicacin: en la presente documentacin esta parada recibe el nombre de parada de seguridad 1.
Parada de seguridad
STOP 2
Una parada que se acciona y controla desde el control de seguridad. El
procedimiento de frenado se ejecuta con un componente de la unidad
de control del robot no destinado a la seguridad y controlado a travs
del control de seguridad. Los accionamientos se mantienen conectados
y los frenos abiertos. En el momento en que el manipulador se para, se
activa una parada de servicio segura.
Cuando se acciona una parada de seguridad STOP 2, la unidad de control del robot establece una salida para el bus de campo.
La parada de seguridad STOP 2 tambin se puede accionar desde el
exterior.
Indicacin: en la presente documentacin esta parada recibe el nombre de parada de seguridad 2.
Categora de Stop 0
Los accionamientos se desconectan de inmediato y se activan los frenos. El manipulador y los ejes adicionales (opcional) frenan cerca de la
trayectoria.
Indicacin: esta categora de detencin recibe en el documento el
nombre de STOP 0.
Categora de Stop 1
El manipulador y los ejes adicionales (opcional) frenan sobre la trayectoria. Transcurrido 1 s se desconectan los accionamientos y se activan
los frenos.
Indicacin: esta categora de detencin recibe en el documento el
nombre de STOP 1.
Categora de Stop 2
Los accionamientos no se desconectan y no se activan los frenos. El
manipulador y los ejes adicionales (opcional) frenan con una rampa de
frenado sobre la trayectoria.
Indicacin: esta categora de detencin recibe en el documento el
nombre de STOP 2.
10 / 35
Integrador de sistema
(Integrador de la instalacin)
Los integradores de sistema son las personas responsables de integrar
el robot industrial de forma segura en una instalacin y de ponerlo en
servicio.
T1
Modo de servicio de prueba, Manual velocidad reducida (<= 250 mm/s)
T2
Modo de servicio de prueba, Manual velocidad alta (> 250 mm/s admisible)
Eje adicional
Eje de movimiento que no forma parte del manipulador, pero que se
controla mediante la unidad de control del robot (p. ej., unidad lineal
KUKA, mesa giratoria basculante, Posiflex).
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
2.2
Personal
Para el uso del robot industrial se definen las personas o grupos de personas
siguientes:
Usuario
Personal
Todas las personas que trabajan con el robot industrial, deben haber
ledo y entendido la documentacin con el captulo sobre seguridades del robot industrial.
Operador
Personal
El operador debe respetar las normas legales de seguridad en el trabajo. Entre ellas, las siguientes:
El operador debe cumplir sus obligaciones de vigilancia.
El operador debe asistir peridicamente a cursos de formacin.
Antes de comenzar a trabajar con la garra se deber informar al personal implicado sobre la naturaleza y el alcance de los trabajos que se realizarn, as
como sobre los posibles peligros. Peridicamente se debern realizar cursos
informativos. Tambin ser necesario organizar cursos informativos despus
de que hayan tenido lugar determinados sucesos o tras haber realizado modificaciones tcnicas.
Se consideran miembros del personal:
El integrador del sistema
Los usuarios, que se dividen en:
personal encargado de la puesta en servicio, el mantenimiento y el
servicio tcnico
operarios
personal de limpieza
El montaje, reemplazo, ajuste, operacin, mantenimiento y reparacin slo deben ser realizados atendiendo las prescripciones del manual de servicio o montaje del correspondiente componente del robot
industrial, y por personal especialmente entrenado para ello.
Integrador del
sistema
El integrador del sistema es el encargado de integrar el robot industrial en la
instalacin respetando todas las medidas de seguridad pertinentes.
El integrador del sistema es responsable de las siguientes tareas:
Usuario
Emplazamiento del robot industrial
Conexin del robot industrial
Evaluacin de riesgos
Instalacin de las funciones de seguridad y de proteccin necesarias
Emisin de la declaracin de conformidad
Colocacin de la marca CE
Elaboracin de las instrucciones de servicio de la instalacin
El usuario debe cumplir las siguientes condiciones:
El usuario deber haber recibido la debida formacin para desempear
los trabajos que va a realizar.
Los trabajos a ejecutar en el robot industrial slo deben ser realizados por
personal cualificado. Por personal cualificado entendemos aquellas personas que de acuerdo a su formacin, conocimientos y experiencia y en
conocimiento de las normas vigentes son capaces de valorar los trabajos
que se han de llevar a cabo y de reconocer eventuales peligros.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
11 / 35
Seguridad de los robots industriales
Ejemplo
Las tareas que ha de ejecutar el personal pueden dividirse tal y como se
muestra en la tabla siguiente.
Tareas a ejecutar
Operario
Programador
Integrador de
sistema
Conectar/desconectar la
unidad de control del
robot
Arrancar el programa
Seleccionar el programa
Seleccionar el modo de
servicio
Medir
(Tool, Base)
Ajustar el manipulador
Configurar
Programacin
Puesta en marcha
Mantenimiento
Reparaciones
Puesta fuera de servicio
Transporte
Trabajos en la parte elctrica y mecnica del robot industrial slo deben ser ejecutados por personal tcnico especializado.
2.3
Campos y zonas de trabajo, proteccin y de peligro
Los campos de trabajo se deben reducir a la medida mnima posible necesaria. Un campo de trabajo debe protegerse con dispositivos de seguridad.
En la zona de proteccin deben hallarse los dispositivos de proteccin (p. ej.
puerta de proteccin). En una parada el manipulador y los ejes adicionales
(opcional) frenan y se detienen en la zona de peligro.
La zona de peligro est compuesta por el campo de trabajo y las carreras de
detencin del manipulador y de los ejes adicionales (opcionales). Deben asegurarse por dispositivos seccionadores de proteccin para evitar peligros de
lesiones o daos materiales.
12 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
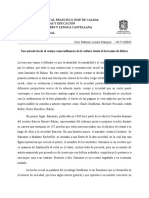
Fig. 2-1: Ejemplo campo del eje 1
2.4
Campo de trabajo
Carrera de detencin
Manipulador
Zona de seguridad
Causa de reacciones de parada
El robot industrial tiene reacciones de parada debido a operaciones realizadas o como reaccin ante controles y mensajes de error. Las siguientes tablas
muestran las reacciones de parada en funcin del modo de servicio seleccionado.
Causa
Soltar tecla START
T1, T2
AUT EXT
STOP 2
Pulsar la tecla STOP
STOP 2
Accionamientos DESC.
STOP 1
La entrada "Validacin de
marcha" se desactiva
STOP 2
Desconectar la unidad de
control del robot (corte de
corriente)
STOP 0
Error interno en la seccin
de la unidad de control
del robot sin funcin de
seguridad
STOP 0 o STOP 1
(depende de la causa del error)
Cambiar el modo de servicio durante el servicio
Abrir la puerta de seguridad (proteccin del operario)
Parada de seguridad 2
-
Parada de seguridad
1
Soltar el interruptor de
parada
Parada de seguridad
2
Pulsar el interruptor de
parada o error
Parada de seguridad
1
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
13 / 35
Seguridad de los robots industriales
Causa
T1, T2
Pulsar PARADA DE
EMERGENCIA
AUT EXT
PARADA DE EMERGENCIA
Parada de seguridad 0
Error en el control de
seguridad o en los perifricos del control de seguridad
2.5
Funciones de seguridad
2.5.1
Resumen de las funciones de seguridad
El robot industrial tiene instaladas las siguientes funciones de seguridad:
Seleccin de modos de servicio
Proteccin del operario (= conexin para el bloqueo de dispositivos seccionadores de seguridad)
Dispositivo de PARADA DE EMERGENCIA
Dispositivo de confirmacin
Parada de servicio segura externa
Parada de seguridad externa 1 (no en la variante de control "KR C4 compact")
Parada de seguridad externa 2
Control de velocidad en T1
Estas funciones de seguridad de los robots industriales satisfacen los siguientes requisitos:
categora 3 y Performance Level d nach EN ISO 13849-1:2008
SIL 2 y HFT 1 segn EN 62061
No obstante, los requisitos se satisfacen nicamente en las siguientes condiciones:
El dispositivo de PARADA DE EMERGENCIA se activa, por lo menos,
cada 6 meses.
En las funciones de seguridad intervienen los componentes siguientes:
Control de seguridad en el PC de control
KUKA Control Panel (KUKA smartPAD)
Cabinet Control Unit (CCU)
Resolver Digital Converter (RDC)
KUKA Power Pack (KPP)
KUKA Servo Pack (KSP)
Safety Interface Board (SIB) (si se utiliza)
Adicionalmente tambin hay interfaces para componentes de fuera del robot
industrial y para otras unidades de control de robot.
El robot industrial puede causar lesiones o daos
materiales si las funciones o dispositivos de seguridad no estn en servicio. En caso de que se hayan desmontado o desactivado las funciones y dispositivos de seguridad, no se debe hacer funcionar
el robot industrial.
14 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
Durante la fase de planificacin de la instalacin tambin se deben
planificar y disear las funciones de seguridad de toda la instalacin.
El robot industrial se debe integrar en este sistema de seguridad de
toda la instalacin.
2.5.2
Control de seguridad
El control de seguridad es una unidad dentro del PC de control. Enlaza las seales y los controles relevantes en materia de seguridad.
Tareas del control de seguridad:
2.5.3
Desconectar accionamientos, activar frenos
Control de la rampa de frenado
Control de la parada (despus del stopp)
Control de velocidad en T1
Evaluacin de las seales relevantes en materia de seguridad
Establecer salidas destinadas a seguridad
Seleccin de modos de servicio
Modos de
servicio
El robot industrial puede utilizarse en los siguientes modos de servicio:
Velocidad reducida manual (T1)
Velocidad alta manual (T2)
Automtico Externo (AUT EXT)
No cambiar el modo de operacin mientras se est ejecutando un
programa. En caso de que se cambie el modo de servicio mientras
est funcionando un programa, el robot industrial se para con una parada de seguridad 2.
Modo de
servicio
Uso
Velocidades
T1
Para el modo de test,
programacin y programacin por aprendizaje
Velocidad programada, mximo
250 mm/s
AUT EXT
Puenteado
Para servicio de test
Para robots industriales con unidad de control superior, p. ej. un
PLC
Modo manual:
Velocidad de desplazamiento
manual, mximo 250 mm/s
T2
Verificacin del programa:
Verificacin del programa:
Velocidad programada
Modo manual: No es posible
Servicio con programa:
Velocidad programada
Modo manual: No es posible
Para poder trabajar con el manipulador en los modos de servicio T1 y T2 con
la puerta de proteccin abierta, existen las siguientes llaves:
Llave
Autorizacin
La llave E2 est activa
Autorizacin para desplazar en T1 con la puerta
de proteccin abierta
Las llaves E2 y E7
estn activas
Autorizacin para desplazar en T1 y en T2 con
la puerta de proteccin abierta
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
15 / 35
Seguridad de los robots industriales
Llave
No hay ninguna llave activa
La llave E2 est activa
Las llaves E2 y E7 estn
activas
2.5.4
Puerta de
proteccin
Se puede realizar un desplazamiento?
T1
T2
Abierta
No
No
Cerrada
Abierta
No
Cerrada
No
No
Abierta
Cerrada
No
No
Proteccin del operario
La seal "Proteccin del operario" sirve para interbloquear dispositivos de proteccin distintos, p. ej. puertas de proteccin. Sin esta seal no es posible es
servicio automtico. Si se pierde la seal durante el servicio automtico (p. ej.
se abre una puerta de proteccin), el manipulador se realiza una parada de
seguridad 1.
En los modos de servicio de test Manual velocidad reducida (T1) y Manual velocidad alta (T2), la proteccin del operario puede puentearse con cerraduras
E2 y E2+E7.
Tras una prdida de seal, el modo automtico no
se puede reanudar por s solo cerrando el dispositivo de seguridad, sino que primero debe confirmarse. El integrador de sistemas debe encargarse de ello. El objetivo de este paso es evitar una
reanudacin del modo automtico no intencionada hallndose personas
dentro de la zona de peligro como, por ej., en caso de una puerta de proteccin cerrada equivocadamente.
2.5.5
La confirmacin se debe implementar deforman que primero se pueda
comprobar realmente la zona de peligro. No est permitida ninguna confirmacin que no permita esta comprobacin (p. ej., confirmacin que se
produce automticamente despus de cerrar el dispositivo de seguridad).
Si no se respeta esta medida, pueden ocasionarse importantes daos
materiales, lesiones graves e incluso la muerte.
Dispositivo de PARADA DE EMERGENCIA
El dispositivo de PARADA DE EMERGENCIA del robot industrial es el dispositivo de PARADA DE EMERGENCIA del KCP. El dispositivo debe pulsarse
en situaciones de peligro o en caso de emergencia.
Reacciones del robot industrial al pulsarse el pulsador de PARADA DE
EMERGENCIA:
El manipulador y los ejes adicionales (opcionales) se detienen con una
parada de seguridad 1.
Para poder seguir con el servicio, debe desenclavarse el pulsador de PARADA DE EMERGENCIA girndolo.
Las herramientas y otras dispositivos unidos al manipulador que puedan suponer algn peligro deben
estar conectados desde la instalacin al circuito de PARADA DE EMERGENCIA.
Si no se respeta esta advertencia, pueden ocasionarse importantes daos
materiales, lesiones graves e incluso la muerte.
16 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
Como mnimo debe haber instalado un dispositivo externo de PARADA DE
EMERGENCIA. Ello garantiza que se puede contar con un dispositivo de PARADA DE EMERGENCIA an estando la KCP conectada.
(>>> 2.5.7 "Dispositivo externo de PARADA DE EMERGENCIA" Pgina 17)
2.5.6
Cerrar sesin del control de seguridad superior
Si la unidad de control del robot est conectada con un control de seguridad
superior, al desconectar la unidad de control del robot se interrumpe obligatoriamente esta conexin.
En caso de utilizar una interfaz X11, provoca una PARADA DE EMERGENCIA en toda la instalacin.
Cuando se utilice una interfaz PROFIsafe, el control de seguridad de
KUKA genera una seal que provoca que el sistema de control superior
no provoque una PARADA DE EMERGENCIA en toda la instalacin.
Si se utiliza una interfaz PROFIsafe: A la hora de
evaluar los riesgos, el integrador de sistemas debe
tener en cuenta que el hecho de desconectar la unidad de control del robot
no active la PARADA DE EMERGENCIA de toda la instalacin, no suponga
ningn peligro y la manera en cmo se debe contrarrestar cualquier posible
peligro.
Si se omite esta consideracin, pueden ocasionarse importantes daos materiales, lesiones graves o incluso la muerte.
Cuando una unidad de control del robot est desconectada, el dispositivo de PARADA DE EMERGENCIA del KCP no est operativo. La empresa explotadora de la mquina debe
encargarse de que la KCP est cubierta o alejada de la instalacin. De este
modo se consigue evitar cualquier confusin entre los dispositivos de PARADA DE EMERGENCIA efectivos y los no efectivos.
Si no se respeta esta medida pueden producirse importantes daos materiales, lesiones graves e incluso la muerte.
2.5.7
Dispositivo externo de PARADA DE EMERGENCIA
En todas las estaciones de operacin que puedan accionar un movimiento del
robot o crear una situacin susceptible de ser peligrosa, se debe disponer de
dispositivos de PARADA DE EMERGENCIA. El integrador de sistemas debe
velar por ello.
Como mnimo debe haber instalado un dispositivo externo de PARADA DE
EMERGENCIA. Ello garantiza que se puede contar con un dispositivo de PARADA DE EMERGENCIA an estando la KCP conectada.
Los dispositivos externos de PARADA DE EMERGENCIA se conectan por
medio de las inferfaces del cliente. Los dispositivos externos de PARADA DE
EMERGENCIA no se incluyen en el contenido de entrega del robot industrial.
2.5.8
Pulsador de hombre muerto
Los pulsadores de hombre muerto del robot industrial se encuentran en el
KCP.
En la KCP se encuentran instalados 3 pulsadores de hombre muerto. Los pulsadores de hombre muerto tienen 3 posiciones:
No pulsado
Posicin intermedia
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
17 / 35
Seguridad de los robots industriales
Pulsado a fondo (posicin de pnico)
En los modos de test, el manipulador slo puede ser desplazado cuando el
pulsador de hombre muerto se encuentra en los modos de servicio de test.
Al soltar el poseedor de hombre muerto se produce una parada de seguridad 2.
Al pulsar el poseedor de hombre muerto se produce una parada de seguridad 1.
Se pueden mantener pulsados al mismo tiempo 3 pulsado este hombre
muerto en la posicin intermedia. Ello permite agarrar de un pulsador de
hombre muerto a otro. Cuando 2 pulsadores de hombre muerto se mantienen pulsados al mismo tiempo en la posicin intermedia durante un rato, transcurridos unos segundos se activa una parada de seguridad.
Si el pulsador de hombre muerto (bornes) funciona incorrectamente, el robot
industrial puede detenerse con los mtodos siguientes:
Accionar pulsador de hombre muerto
Accionar el dispositivo de PARADA DE EMERGENCIA
Soltar tecla de arranque
Los pulsadores de validacin no deben sujetarse
con cintas adhesivas o similares ni ser manipulados
de cualquier otro modo.
Pueden producirse daos materiales, lesiones graves e incluso la muerte.
2.5.9
Dispositivo de validacin externo
Los dispositivos de confirmacin externos son necesarios cuando deban situarse varias personas en la zona de peligro del robot industrial. Pueden conectarse a la unidad de control del robot a travs de una interfaz o del
PROFIsafe.
En el captulo "Planificacin" de las instrucciones de servicio y de
montaje de la unidad de control del robot, se describe la interfaz a travs de la cual se pueden conectar diferentes dispositivos de confirmacin externos.
Los dispositivos externos de confirmacin no pertenecen al volumen de suministro del robot industrial.
2.5.10
Parada de servicio externa segura
La parada de servicio segura tambin se puede accionar a travs de una entrada de la interfaz de cliente. El estado se mantiene mientras la seal externa
permanezca en FALSE. Cuando la seala externa cambie a TRUE, se puede
volver a desplazar el manipulador. No es necesario ninguna confirmacin.
2.5.11
Parada de seguridad externa 1 y parada de seguridad externa 2
La parada de seguridad 1 y la parada de seguridad 2 se pueden accionar a
travs de una entrada de la interfaz de cliente. El estado se mantiene mientras
la seal externa permanezca en FALSE. Cuando la seal externa cambia a
TRUE, se puede volver a desplazar el manipulador. No es necesario ninguna
confirmacin.
La variante de unidad de control "KR C4 compact" no dispone de ninguna parada de seguridad 1 externa.
18 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
2.5.12
Control de velocidad en T1
En el modo de servicio T1 se controla la velocidad del TCP. Si la velocidad se
sobrepasara de los 250 mm/s debido a un error, se activara una parada de
seguridad 0.
2.6
Equipamiento de proteccin adicional
2.6.1
Modo tecleado
En los modos de servicio Manual Velocidad reducida (T1) y Manual Velocidad
alta (T2) la unidad de control del robot slo puede ejecutar un programa en el
modo tecleado. Esto significa que, para ejecutar un programa, deben mantenerse pulsados un pulsador de hombre muerto y la tecla de arranque.
2.6.2
Al soltar el poseedor de hombre muerto se produce una parada de seguridad 2.
Al pulsar el poseedor de hombre muerto se produce una parada de seguridad 1.
Al soltar la tecla de inician se produce un STOP 2.
Finales de carrera software
Los campos de todos los ejes del manipulador y de posicionamiento se encuentran limitados por medio de lmites de carrera software ajustables. Estos
lmites de carrera software sirven a efectos de proteccin de la mquina y deben ser ajustados de modo tal que el manipulador/posicionador no pueda chocar contra los topes finales mecnicos.
Los lmites de carrera software se ajustan durante la puesta en servicio de un
robot industrial.
Informaciones adicionales se encuentran en los manuales de servicio y programacin del robot.
2.6.3
Topes finales mecnicos
Los rangos de movimiento de los ejes base y de la mueca se encuentran limitados por medio de topes finales mecnicos dependiendo de la variante del
robot.
Adicionalmente, pueden montarse topes finales mecnicos en los ejes adicionales.
Si un manipulador o un eje adicional choca contra un
obstculo o un tope mecnico o bien la limitacin del
campo de trabajo, puede ocasionar daos al robot industrial. El manipulador
deber ponerse fuera de servicio y antes de repuesta en marcha es necesario una consulta con KUKA Roboter GmbH.
2.6.4
Limitacin mecnica de la zona del eje (opcin)
En algunos manipuladores pueden colocarse, en los ejes del A1 al A3, limitaciones mecnicas del campo del eje. Los lmites desplazables de las zonas
del eje limitan el campo de trabajo a un mnimo necesario. Con ello se aumenta la proteccin de personas y de la instalacin.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
19 / 35
Seguridad de los robots industriales
En los manipuladores que no disponen de limitaciones mecnicas del campo
del eje, el campo de trabajo debe organizarse de forma que no pueda producirse ningn riesgo de lesiones o daos materiales a pesar de no disponer de
dichas limitaciones.
Si ello no fuera posible, el campo de trabajo debe limitarse con barreras fotoelctricas, cortinas luminosas o balizas. En las zonas de carga o transferencia
de materiales no debe haber ningn punto con riesgo de sufrir cortes o magulladuras.
Esta opcin no est disponible para todos los tipos de robot. Informaciones sobre determinados tipos de robot: consultar a KUKA Roboter
GmbH.
2.6.5
Control de zona del eje (opcin)
Algunos manipuladores pueden ser equipados, en los ejes principales A1
hasta A3, con controles bicanales de zona del eje. Los ejes de los posicionadores pueden ser equipados con controles adicionales de las zonas de eje.
Con un control de zona del eje puede delimitarse y controlarse la zona de proteccin de ese eje. Con ello se aumenta la proteccin de personas y de la instalacin.
Esta opcin no est disponible para todos los tipos de robot. Informaciones sobre determinados tipos de robot: consultar a KUKA Roboter
GmbH.
2.6.6
Dispositivo de liberacin (opcional)
Descripcin
El dispositivo de liberacin permite mover el manipulador manualmente en
caso de accidente o avera. El dispositivo de liberacin puede utilizarse para
los motores de accionamiento de los ejes principales y, dependiendo de la variante del robot, tambin para los motores de accionamiento del eje de la mueca. nicamente se debe utilizar en situaciones excepcionales y casos de
emergencia como, p. ej., para liberar personas.
Durante el servicio, los motores alcanzan temperaturas que pueden causar quemaduras a la piel.
Debe evitarse cualquier contacto. Deben aplicarse medidas de proteccin
adecuadas como, p. ej., llevar guantes.
Procedimiento
1. Desconectar la unidad de control del robot y asegurarla contra una reconexin indebida (p. ej., con un candado).
2. Quitar la tapa protectora del motor.
3. Posicionar el dispositivo de liberacin en el motor correspondiente y mover el eje en la direccin deseada.
La direccin de movimiento se encuentra indicada sobre los motores por
medio de flechas. Debe vencerse la resistencia mecnica del freno por
motor y, en caso necesario, tambin las posibles cargas adicionales de
los ejes.
Al desplazar un eje con el dispositivo de liberacin,
el freno por motor puede sufrir daos. Pueden producirse daos personales y materiales. Despus de utilizar el dispositivo de
liberacin debe sustituirse el motor.
20 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
2.6.7
Identificaciones en el robot industrial
Todas placas, indicaciones, smbolos y marcas son piezas integrantes del robot industrial relevantes para la seguridad. No deben modificarse ni quitarse
en ningn caso.
Placas de identificacin en el robot industrial son:
Placas caractersticas
Indicaciones de advertencia
Smbolos de seguridad
Rtulos
Identificacin de cables
Placas caractersticas
Puede encontrar ms informacin en los datos tcnicos de las instrucciones de servicio o de montaje de los componentes del robot industrial.
2.6.8
Dispositivos de seguridad externos
Los dispositivos de seguridad se encargan de impedir el acceso de personas
a la zona de peligro del robot industrial. El integrador de sistemas debe velar
por ello.
Los dispositivos de seguridad seccionadores deben cumplir los requisitos siguientes:
Deben cumplir los requisitos della norma EN 953.
Impiden el acceso de personas en la zona de peligro y no pueden salvarse
fcilmente.
Estn bien fijados y resisten las fuerzas mecnicas previsibles provenientes del servicio y del entorno.
No suponen ellos mismos ningn peligro por ellos mismos ni pueden causar ninguno.
Respetar la distancia mnima prescrita a la zona de peligro.
Las puertas de seguridad (puertas de mantenimiento) deben cumplir los requisitos siguientes:
El nmero de puertas se limita al mnimo necesario.
Los enclavamientos (p. ej. los interruptores de las puertas) estn unidos a
la entrada de proteccin del operario de la unidad de control del robot por
medio de los dispositivos de conmutacin de la puerta o de la PLC de seguridad.
Los dispositivos de conmutacin, los interruptores y el tipo de circuito
cumplen los requisitos del nivel de eficiencia d y la categora 3 de la norma
EN 13849-1.
En funcin del peligro, la puerta de seguridad adems se debe asegurar
con un cierre que slo permita abrir la puerta cuando el manipulador est
parado por completo.
El pulsador para confirmar la puerta de seguridad se encuentra montado
fuera del vallado que delimita el rea asegurada.
En las correspondientes normas y prescripciones puede encontrarse
informacin adicional. sta incluye tambin la norma EN 953.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
21 / 35
Seguridad de los robots industriales
Otros dispositivos de
proteccin
2.7
Otros dispositivos de proteccin deben ser integrados a la instalacin en concordancia con las correspondientes normas y prescripciones.
Resumen de los modos de servicio y de las funciones de proteccin
La siguiente tabla muestra en cual de los modos de servicio se encuentran activos las funciones de proteccin.
Medidas de seguridad
T1
T2
AUT EXT
Proteccin del operario
-*
-*
Activo
Dispositivo de PARADA DE
EMERGENCIA
Activo
Activo
Activo
Pulsador de hombre muerto
Activo
Activo
Velocidad reducida durante la
verificacin del programa
Activo
Modo tecleado
Activo
Activo
Finales de carrera software
Activo
Activo
Activo
* En los modos de servicio T1 y T2, la proteccin del operario se puede puentear con cerradura E2 y E2+E7.
2.8
Medidas de seguridad
2.8.1
Medidas generales de seguridad
El robot industrial slo deber utilizarse para los fines previstos y deber encontrarse en un estado idneo desde el punto de vista tcnico respetando todas las medidas de seguridad. En caso de realizar alguna accin indebida
pueden provocarse daos personales o materiales.
An estando la unidad de control del robot desconectada y asegurada, el robot industrial puede efectuar movimientos inesperados. El manipulador o los
ejes adicionales pueden descender a causa de haber efectuado un montaje
incorrecto (p. ej. sobrecarga) o algn defecto mecnico (p. ej. freno defectuoso). Si se ha de trabajar con el robot industrial desconectado, el manipulador
y los ejes adicionales deben desplazarse a una posicin tal que no puedan
moverse por s mismos con o sin influencia de la carga montada. Si sto no
fuese posible, deben asegurarse el manipulador y los ejes adicionales de forma adecuada.
El robot industrial puede causar lesiones o daos
materiales si las funciones o dispositivos de seguridad no estn en servicio. En caso de que se hayan desmontado o desactivado las funciones y dispositivos de seguridad, no se debe hacer funcionar
el robot industrial.
Permanecer debajo de la mecnica del robot puede
causar lesiones graves e incluso la muerte. Por este
motivo est terminantemente prohibido permanecer debajo de la mecnica
del robot.
Durante el servicio, los motores alcanzan temperaturas que pueden causar quemaduras a la piel.
Debe evitarse cualquier contacto. Deben aplicarse medidas de proteccin
adecuadas como, p. ej., llevar guantes.
22 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
El explotador debe asegurarse de que nicamente las personas autorizadas
manejen el robot industrial con el KCP.
KCP
Si en una instalacin hay varios KCP, debe tenerse prestarse atencin a que
cada KCP est asignado de forma unvoca al robot industrial pertinente. No
deben producirse confusiones en las conexiones.
El explotador debe encargarse de retirar inmediatamente de la instalacin el KCP acoplado y de proteger el personal que est trabajando en el robot industrial fuera de su alcance
(incluido el alcance de la vista). De este modo se consigue evitar cualquier
confusin entre los dispositivos de PARADA DE EMERGENCIA efectivos y
los no efectivos.
Si no se respeta esta advertencia, pueden ocasionarse importantes daos
materiales, lesiones graves e incluso la muerte.
En caso de avera en el robot industrial se debe proceder del modo siguiente:
Fallos
Modificaciones
Desconectar la unidad de control del robot y asegurarla contra una reconexin indebida (p. ej., con un candado).
Informar sobre la avera mediante un cartel con la indicacin correspondiente.
Llevar un registro de las averas.
Subsanar la avera y verificar el funcionamiento.
Si se ha efectuado alguna modificacin en el robot industrial, se debe comprobar que quede garantizado el nivel de seguridad necesario. Para esta comprobacin se deben tener en cuenta las disposiciones vigentes nacionales y
regionales en materia de proteccin laboral. Adems, debe comprobarse tambin que todos los circuitos de seguridad funcionan correctamente.
Los programas nuevos o modificados siempre se deben probar primero en el
modo de servicio Manual Velocidad reducida (T1).
Tras efectuar alguna modificacin en el robot industrial, los programas existentes siempre deben ser probados primero en el modo de servicio Manual
Velocidad reducida (T1). Esto es vlido para todos los componentes del robot
industrial y tambin incluye las modificaciones de software y los ajustes de
configuracin.
2.8.2
Transporte
Manipulador
Debe respetarse la posicin de transporte prescrita para el manipulador. El
transporte debe realizarse conforme a las instrucciones de servicio o las instrucciones de montaje del manipulador.
Unidad de control
del robot
Debe respetarse la posicin de transporte prescrita para la unidad de control
del robot. El transporte debe realizarse conforme a las instrucciones de servicio o las instrucciones de montaje de la unidad de control del robot.
Durante el transporte, evitar vibraciones o golpes para no daar la unidad de
control del robot.
Eje adicional
(opcional)
Debe respetarse la posicin de transporte prescrita para el eje adicional (por
ejemplo, unidad lineal KUKA, mesa giratoria basculante, posicionador). El
transporte debe realizarse conforme a las instrucciones de servicio o a las instrucciones de montaje del eje adicional.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
23 / 35
Seguridad de los robots industriales
2.8.3
Puesta en servicio y reanudacin del servicio
Antes de la primera puesta en servicio de una instalacin o un dispositivo,
debe realizarse una comprobacin para asegurarse de que la instalacin o el
dispositivo estn completos y en condiciones de funcionamiento, que pueden
ser operados en condiciones de seguridad y que se pueden detectar posibles
daos.
Para esta comprobacin se deben tener en cuenta las disposiciones vigentes
nacionales y regionales en materia de proteccin laboral. Adems, debe comprobarse tambin que todos los circuitos de seguridad funcionan correctamente.
La unidad de control del robot se encuentra preconfigurada para el robot industrial correspondiente. En
caso de cables intercambiados el manipulador y los ejes adicionales (opcin) pueden recibir datos errneos y provocar por ello daos a personas o
objetos. Si una instalacin se compone de varios manipuladores, conectar
siempre los cables de unin al manipulador y a la correspondiente unidad de
control del robot.
Cuando se integran componentes adicionales (p. ej., cables) en el
sistema del robot industrial que no pertenecen al volumen de suministro de KUKA Roboter GmbH, el usuario se hace responsable de
que dichos componentes no interfieran en las funciones de seguridad del robot o lo pongan fuera de servicios.
Cuando la temperatura interior del armario de la unidad de control del robot difiere demasiado de la temperatura ambiente, se puede formar agua de condensacin el cual podra
causar daos en la parte elctrica. La unidad de control del robot recin debe
ser puesta en servicio cuando la temperatura interior del armario se haya
aproximado a la temperatura ambiente.
Prueba de funcionamiento
Antes de la puesta en servicio o de la reanudacin del servicio deben realizarse las siguientes comprobaciones:
Prueba general:
Asegurarse de que:
El robot industrial est correctamente colocado y fijado conforme a las indicaciones incluidas en la documentacin.
Sobre el robot industrial no hay cuerpos extraos, ni piezas sueltas o defectuosas.
Todos los dispositivos de seguridad necesarios estn correctamente instalados y en condiciones de funcionamiento.
Los valores de conexin del robot industrial coinciden con la tensin y la
estructura de la red local.
El cable de puesta a tierra y el cable equipotencial estn bien tendidos y
correctamente conectados.
Los cables de unin estn correctamente conectados y los conectores
bloqueados.
Comprobacin de las funciones de seguridad:
Mediante un test de funcionamiento se debe asegurar que las siguientes funciones de seguridad trabajan correctamente:
24 / 35
Dispositivo local de PARADA DE EMERGENCIA
Dispositivo externo de PARADA DE EMERGENCIA (entrada y salida)
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
Pulsador de hombre muerto (en los modos de servicio de test)
Proteccin del operario
Todas las dems entradas y salidas utilizadas y relevantes en materia de
seguridad
Otras funciones de seguridad externas
Comprobar el control de la velocidad reducida:
Para esta comprobacin se debe proceder de la siguiente manera:
1. Programar una trayectoria recta y programar la velocidad mxima permitida.
2. Determinar la longitud de la trayectoria.
3. Recorrer la trayectoria en el modo de servicio T1 con un override del
100 % y medir el tiempo con un cronmetro.
Durante el desplazamiento de la trayectoria no debe
hallarse ninguna persona en la zona de peligro.
Existe peligro de muerte o de sufrir lesiones graves.
4. Obtener la velocidad a partir de la longitud de la trayectoria y el tiempo medido.
El control de la velocidad reducida funciona de modo correcto si se producen
los resultados siguientes:
Datos de mquina
La velocidad obtenida no es superior a 250 mm/s.
El manipulador se ha desplazado a lo largo de la trayectoria programada
(es decir de manera recta, sin desviaciones).
Debe asegurarse que la placa de caractersticas de la unidad de control del
robot contenga los mismos datos de mquina registrados en la declaracin de
montaje. Los datos de mquina de la placa caracterstica del manipulador y
de los ejes adicionales (opcin) deben ser declarados en la puesta en servicio.
Si no se han cargado los datos de mquina correctos, el robot industrial no se debe mover. De lo contrario podran producirse daos materiales, lesiones graves e incluso la
muerte. Deben estar cargados los datos de mquina correctos.
Despus de modificar algn dato de la mquina se debe comprobar la configuracin de seguridad.
En las instrucciones de manejo y programacin para los integradores
de sistemas puede consultarse ms informacin al respecto.
Despus de modificar algn dato de la mquina se debe comprobar el control
de velocidad reducida.
2.8.3.1
Modo de puesta en servicio
Descripcin
El robot industrial se puede colocar en un modo de puesta en servicio a travs
de la interfase de usuario smartHMI. Este modo permiten desplazar el manipulador a T1 o KRF sin la presencia de la periferia de seguridad. (KRF es un
modo de servicio especfico para SafeOperation).
Si se utiliza una interfaz X11:
El modo de puesta en servicio es admisible siempre que todas las seales
de entrada tengan el estado "cero lgico". De lo contrario, la unidad de
control del robot impide o finaliza el modo de puesta en servicio.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
25 / 35
Seguridad de los robots industriales
Si se utiliza una interfaz PROFIsafe:
Si existe o se establece una unin con un sistema de seguridad superior,
la unidad de control del robot impide o finaliza el modo de puesta en servicio.
Posibles peligros y riesgos al utilizar el modo de puesta en servicio:
Peligros
Una persona transita por la zona de peligro del manipulador.
Una persona no autorizada mueve el manipulador.
En caso de peligro se acciona un dispositivo externo inactivo de PARADA
DE EMERGENCIA y el manipulador no se desconecta.
Medidas adicionales para la prevencin de riesgos en el modo de puesta en
servicio:
Utilizacin
No cubrir los dispositivos no operativos de PARADA DE EMERGENCIA o
sealar mediante un cartel de advertencia el dispositivo no operativo de
PARADA DE EMERGENCIA.
Si no se dispone de ninguna valla de seguridad, se debe evitar con otras
medidas que las personas accedan a la zona de peligro de manipulador
como, por ejemplo, con una cinta.
El uso del modo de puesta en servicio se debe limitar o evitar en la medida
de lo posible por medidas organizativas.
Utilizacin conforme a los fines previstos del modo puesta en servicio:
nicamente personal del servicio tcnico debidamente formado en materia de seguridad puede utilizar el modo de puesta en servicio.
Puesta en servicio en el modo T1 o KRF cuando los dispositivos de seguridad externos todava no estn instalados o puestos en servicio. La zona
de peligro debe delimitarse, como mnimo, con una cinta.
Para delimitar un fallo (fallo perifrico).
Al utilizar el modo de puesta en servicio, todos los
dispositivos de seguridad externos se encuentran
fuera de servicio. El personal del servicio tcnico debe velar para que, mientras los dispositivos de seguridad estn fuera de servicio, no haya nadie dentro o en las inmediaciones de la zona de peligro del manipulador.
Si no se respeta esta medida, pueden producirse daos materiales, lesiones
o incluso la muerte.
Uso incorrecto
Todas las utilizaciones que difieran de la utilizacin conforme a los fines previstos se consideran usos incorrectos. Se incluye, p. ej., el uso por parte de
otro grupo de personas.
KUKA Systems GmbH no se hace responsable de los daos que pudieran
ocasionarse. El riesgo lo asume nica y exclusivamente el explotador.
2.8.4
Modo de servicio manual
El servicio manual es el servicio para realizar los trabajos de ajuste. Se consideran trabajos de ajuste todos los trabajos que deban llevarse a cabo en el
robot industrial para poder ser operado en servicio automtico. Son trabajos
de ajuste:
26 / 35
Modo tecleado
Programacin por aprendizaje
Programacin
Verificacin del programa
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
En el modo manual se deben tener en cuenta los aspectos siguientes:
Si no se necesitan los accionamientos, stos deben ser desconectados
para que el manipulador o los ejes adicionales (opcional) no puedan desplazarse por equivocacin.
Los programas nuevos o modificados siempre se deben probar primero
en el modo de servicio Manual Velocidad reducida (T1).
Las herramientas, el manipulador o los ejes adicionales (opcional) no deben tocar nunca el vallado de seguridad o sobresalir del mismo.
Las piezas, herramientas u otros objetos no deben quedar apretados por
el desplazamiento del robot industrial, ni tampoco llevar a cortocircuitos o
caerse.
Todos los trabajos de ajuste deben realizarse en la medida de lo posible
fuera del vallado de seguridad que delimita el rea asegurada.
Si los trabajos de ajuste deben llevarse a cabo dentro del vallado de seguridad
que delimita el rea asegurada, se deben tener en cuenta los puntos siguientes.
En el modo de servicio Manual Velocidad reducida (T1):
Si se puede evitar, no debe hallarse ninguna otra persona dentro de la
zona delimitada por los dispositivos de seguridad.
Si es imprescindible que varias personas permanezcan dentro de la zona
delimitada por los dispositivos de seguridad, se debe tener en cuenta lo
siguiente:
Todas las personas deben tener a disposicin un pulsador de hombre
muerto.
Todas las personas deben tener un contacto visual sin obstculos sobre el robot industrial.
Debe poder haber contacto visual entre todas las personas implicadas.
El operario debe situarse en una posicin desde la cual pueda tener visin
sobre la zona de peligro para as poder evitar posibles peligros.
En el modo de servicio Manual Velocidad alta (T2):
2.8.5
Este modo de servicio slo puede utilizarse cuando se requiere la aplicacin de un test con servicio Manual velocidad alta o reducida.
Este modo de servicio no permite la programacin ni la programacin por
aprendizaje.
El operario debe asegurarse antes de iniciar el test que los interruptores
de hombre muerto estn en condiciones de funcionamiento.
El operario debe colocarse en fuera de la zona de peligro.
No debe hallarse ninguna otra persona dentro de la zona delimitada por
los dispositivos de seguridad. El operario debe encargarse de ello.
Simulacin
Los programas de simulacin no corresponden exactamente con la realidad.
Los programas de robot creados con programas de simulacin deben probarse en la instalacin en modo de servicio Manual Velocidad reducida (T1).
En caso necesario, debe corregirse el programa correspondientemente.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
27 / 35
Seguridad de los robots industriales
2.8.6
Modo de servicio automtico
El servicio automtico slo es posible si se cumplen las siguientes medidas
de seguridad:
Todos los dispositivos de seguridad y proteccin estn debidamente montados y en condiciones de funcionamiento.
En la instalacin no se encuentra ninguna persona.
Se cumplen los procedimientos definidos para la ejecucin de los trabajos.
Cuando el manipulador o un eje adicional (opcional) se detiene sin motivo
aparente, slo se puede acceder a la zona de peligro despus de haber accionado una PARADA DE EMERGENCIA.
2.8.7
Mantenimiento y reparaciones
Si se ha efectuado algn trabajo de mantenimiento o reparacin, se debe
comprobar que quede garantizado el nivel de seguridad necesario. Para esta
comprobacin se deben tener en cuenta las disposiciones vigentes nacionales y locales en materia de proteccin laboral. Adems, debe comprobarse
tambin que todos los circuitos de seguridad funcionen correctamente.
El mantenimiento y las reparaciones tienen por misin asegurar que se mantenga el estado funcional o se restablezca en caso de avera. La reparacin
comprende la deteccin de fallos y su subsanacin.
Medidas de seguridad en tareas a efectuar en el robot industrial:
Efectuar los trabajos fuera de la zona de peligro. Si se deben efectuar tareas dentro de la zona de peligro, el usuario debe implementar medidas
de seguridad adicionales para garantizar la seguridad de la persona.
Desconectar el robot industrial y asegurarlo contra una puesta en servicio
(p. ej., con un candado). Si se deben efectuar tareas con la unidad de control del robot conectada, el usuario debe ordenar medidas de seguridad
adicionales para garantizar la seguridad de la persona.
Si las tareas deben realizarse con unidad de control del robot conectada,
estas slo deben efectuarse en el modo de servicio T1.
Informar con un cartel de los trabajos que se estn llevando a cabo en la
instalacin. Este cartel deber mantenerse tambin si se interrumpen
temporalmente los trabajos.
Los dispositivos de PARADA DE EMERGENCIA deben mantenerse activos. Si para realizar los trabajos de mantenimiento o de reparacin es necesario desactivar alguna funcin de seguridad o proteccin, se debern
volver a restablecer de inmediato.
Antes de realizar trabajos en componentes del sistema de robot que estn bajo tensin, debe desconectarse el interruptor principal y asegurarse contra una reconexin. A
continuacin debe controlarse que los componentes no estn bajo tensin.
Antes de realizar trabajos en componentes bajo tensin, no basta con activar
una PARADA DE EMERGENCIA/parada de seguridad o con desconectar
los accionamientos. En el caso de los sistemas de accionamiento de la nueva generacin, el sistema de robot no es desconectado de la red. Hay componentes que continan estando bajo tensin. Existe peligro de muerte o de
sufrir lesiones graves.
Los componentes defectuosos deben reemplazarse por componentes nuevos
con el mismo nmero de artculo o por componentes que KUKA Roboter
GmbH considere equivalentes.
28 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
Los trabajos de limpieza y cuidado deben efectuarse de conformidad con la
descripcin incluida en las instrucciones de servicio.
Unidad de control
del robot
An con la unidad de control del robot desconectada, pueden encontrarse
partes bajo tensin conectadas a la periferia del equipo. Por consiguiente, las
fuentes externas se deben desconectar cuando haya que efectuar trabajos en
la unidad de control del robot.
Al efectuar cualquier tarea en los componentes en la unidad de control del robot se deben respetar las prescripciones sobre componentes sometidos a
riesgos electroestticos.
Despus de desconectar la unidad de control del robot, los distintos componentes pueden contener durante varios minutos tensiones superiores a 50 V
(hasta 780 V). Para evitar lesiones con peligro de muerte, durante ese lapso
de tiempo no deben efectuarse tareas en el robot industrial.
Debe evitarse la penetracin de restos de agua y polvo en la unidad de control
del robot.
Compensacin
de peso
Algunos tipos de robot se encuentran equipados con una compensacin de
peso hidroneumtica, por muelle o cilindro de gas.
Las compensaciones de peso hidroneumticas y con cilindro de gas son aparatos de presin y deben ser supervisados. De acuerdo con la variante del robot los sistemas de compensacin del peso responden a la categora 0, II o
III, grupo fluidos 2 de la directiva sobre equipos de presin.
El explotador debe respetar las leyes, prescripciones y normas especficas
del pas para aparatos de presin.
Plazos de control en Alemania segn prescripcin de seguridad operativa 14
y 15. Control antes de puesta en servicio en el lugar de instalacin por el explotador.
Las medidas de seguridad que se deben tomar al realizar trabajos en el sistema de compensacin de peso son:
Materiales
peligrosos
Los grupos constructivos del manipulador compatibles con los sistemas
de compensacin de peso deben asegurarse.
Los trabajos en sistemas de compensacin de peso slo deben ser realizados por personal cualificado.
Medidas de seguridad en el trato con materiales peligrosos son:
Evitar el contacto intenso, largo y repetitivo con la piel.
Evitar en lo posible, aspirar neblinas o vapores de aceite.
Disponer lo necesario para limpieza y cuidado de la piel.
Para una utilizacin segura de nuestros productos recomendamos a
nuestros clientes requerir regularmente de los fabricantes de materiales peligrosos las hojas de datos de seguridad ms actualizados.
2.8.8
Puesta fuera de servicio, almacenamiento y eliminacin de residuos
La puesta fuera de servicio, el almacenamiento y la eliminacin de residuos
debern llevarse a cabo de conformidad con las leyes, prescripciones y normas especficas del pas.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
29 / 35
Seguridad de los robots industriales
2.8.9
Medidas de seguridad para el "Single Point of Control"
Vista general
Cuando el robot industrial utiliza determinados componentes, deben aplicarse
medidas de seguridad para poner en prctica por completo el principio del
"Single Point of Control" (SPOC).
Componentes:
Interpretador SUBMIT
PLC
Servidor OPC
Remote Control Tools
Herramientas para configurar los sistemas de bus con funcin online
KUKA.RobotSensorInterface
Puede que sea necesaria la aplicacin de otras medidas de seguridad. Esto debe aclararse en funcin del caso y es responsabilidad
del integrador del sistema, del programador y del explotador de la
instalacin.
Puesto que los estados de seguridad de los actuadores que se encuentran en
la periferia de la unidad de control del robot nicamente los conoce el integrador del sistema, es su responsabilidad colocar dichos actuadores (p. ej., en
una PARADA DE EMERGENCIA) en estado seguro.
T1, T2
Interpretador
Submit, PLC
En los modos de servicio de test, los componentes anteriormente mencionados solo pueden acceder al robot industrial cuando las seales siguientes presenten los estados siguientes:
Seal
Estado necesario para SPOC
$USER_SAF
TRUE
$SPOC_MOTION_ENABLE
TRUE
Si el interpretador Submit o el PLC puede accionar movimientos (p. ej. los accionamientos o la garra) por medio del sistema de entradas y salidas y dichos
movimientos no estn asegurados de ningn otro modo, tambin pueden accionarse en los modos de servicio T1 o T2 o durante una PARADA DE EMERGENCIA activa.
Si el interpretador Submit o el PLC puede modificar variables que tengan efecto en el movimiento del robot (p. ej. override), tambin surtirn efecto en los
modos de servicio T1 o T2 o durante una PARADA DE EMERGENCIA activa.
Medidas de seguridad:
En los modos de servicio de test, la variante del sistema $OV_PRO del
interpretador Submit no debe ser descrita desde y por la PLC.
No modificar las seales y variables relevantes en materia de seguridad
(p. ej. modo de servicio, PARADA DE EMERGENCIA, contacto puerta de
seguridad) con el interpretador Submit o el PLC.
Si a pesar de todo es necesario efectuar cambios, todas las seales y variables relevantes para la seguridad deben estar enlazadas de forma que
el interpretador Submit o el PLC no pueda colocarlas en un estado potencialmente peligroso.
Servidor OPC,
Remote Control
Tools
30 / 35
Gracias a accesos de escritura, estos componentes permiten modificar programas, salidas u otros parmetros de la unidad de control del robot sin que
lo noten las personas que se hallan en la instalacin.
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
2 Seguridad
Medidas de seguridad:
Estos componentes estn diseados por KUKA exclusivamente para tareas de diagnstico y visualizacin.
Los programas, salidas u otros parmetros de la unidad de control del robot no pueden modificarse con estos componentes.
Herramientas
para configurar
los sistemas de
bus
Si se utilizan estos componentes, se deben especificar en una evaluacin
de riegos aquellas salidas que puedan causar algn peligro. Estas salidas
se deben distribuir de forma que se puedan usar sin validacin. Esto puede realizarse, por ejemplo, con un dispositivo de validacin externo.
Cuando estos componentes disponen funcin online, se pueden modificar
programas, salidas y otros parmetros de la unidad de control del robot a travs de accesos de escritura sin que lo noten las personas que se hallan en la
instalacin.
WorkVisual de KUKA
Herramientas de otros fabricantes
Medidas de seguridad:
2.9
En los modos de servicio de test los programas, salidas u otros parmetros de la unidad de control del robot no pueden modificarse con estos
componentes.
Normas y prescripciones aplicadas
Nombre
Definicin
Edicin
2006/42/CE
Directiva relativa a las mquinas:
2006
Directiva 2006/42/CE del Parlamento Europeo y de la
Comisin, de 17 de mayo de 2006, relativa a las mquinas y por la que se modifica la Directiva 95/16/CE (refundicin).
2004/108/CE
Directiva sobre compatibilidad electromagntica:
2004
Directiva 2004/108/CE del Parlamento Europeo y de la
Comisin, de 15 de diciembre de 2004, relativa a la
aproximacin de las legislaciones de los Estados miembros en materia de compatibilidad electromagntica y por
la que se deroga la Directiva 89/336/CEE.
97/23/CE
Directiva sobre equipos a presin:
1997
Directiva 97/23/CE del Parlamento Europeo y del Consejo, de 29 de mayo de 1997, relativa a la aproximacin
de las legislaciones de los Estados miembros sobre equipos a presin
(Se aplica exclusivamente a robots con compensacin de
peso hidroneumtica.)
EN ISO 13850
Seguridad de las mquinas.
2008
Parada de emergencia. Principios para el diseo.
EN ISO 13849-1
Seguridad de las mquinas.
2008
Partes de los sistemas de mando relativas a la seguridad.
Parte 1: Principios generales para el diseo.
EN ISO 13849-2
Seguridad de las mquinas.
2008
Componentes de seguridad de los sistemas de control;
parte 2: Validacin
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
31 / 35
Seguridad de los robots industriales
Nombre
Definicin
Edicin
EN ISO 12100
Seguridad de las mquinas.
2010
Principios generales para el diseo y valoracin y reduccin del riesgo
EN ISO 10218-1
Robots industriales:
2011
Seguridad
EN 614-1
Seguridad de las mquinas.
2006
Principios de diseo ergonmico. Parte 1: Terminologa y
principios generales
EN 61000-6-2
Compatibilidad electromagntica (CEM):
2005
Parte 6-2: Normas genricas. Inmunidad en entornos
industriales.
EN 61000-6-4
Compatibilidad electromagntica (CEM):
2007
Parte 6-4: Normas genricas. Norma de emisin en entornos industriales
EN 60204-1
2006
Seguridad de las mquinas.
Equipo elctrico de las mquinas. Parte 1: Requisitos
generales.
32 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
Indice
Indice
Nmeros
2004/108/CE 31
2006/42/CE 31
89/336/CEE 31
95/16/CE 31
97/23/CE 31
A
Accesorios 7
Almacenamiento 29
C
Cables de unin 7
Campo de trabajo 12, 13
Campo del eje 9
Carrera de detencin 13
Categora de Stop 0 10
Categora de Stop 1 10
Categora de Stop 2 10
Compensacin de peso 29
Control de seguridad 15
Control de zona del eje 20
Control, velocidad 19
F
Fallos 23
Finales de carrera software 19, 22
Freno defectuoso 22
Funciones de seguridad, resumen 14
I
Identificaciones 21
Integrador de la instalacin 10
Integrador de sistema 10
Integrador del sistema 8, 11
Interbloqueo de distintos dispositivos de proteccin 16
Introduccin 5
K
KCP 9, 23
KUKA smartPAD 9
L
Limitacin de zonas de ejes 19
Limitacin del campo de trabajo 19
Limitacin mecnica del campo de trabajo 19
D
Datos de mquina 25
Declaracin de conformidad 8
Declaracin de conformidad de la CE 8
Declaracin de montaje 7, 8
Directiva relativa a las mquinas 31
Directiva sobre compatibilidad electromagntica
31
Directiva sobre equipos a presin 31
Directiva sobre equipos de presin 29
Dispositivo de liberacin 20
Dispositivo de PARADA DE EMERGENCIA 16,
17, 22
Dispositivo de validacin, externo 18
Dispositivos de seguridad, externos 21
Distancia de frenado 9
Distancia de parada 9
Distancia de reaccin 9
M
Manipulador 7, 9, 13
Mantenimiento 28
Marca CE 8
Materiales peligrosos 29
Medidas de seguridad 22
Medidas generales de seguridad 22
Mesa giratoria basculante 7
Modo de puesta en servicio 25
Modo de servicio automtico 28
Modo de servicio manual 26
Modo tecleado 19, 22
E
Ejes adicionales 7, 10
Eliminacin de residuos 29
EN 60204-1 32
EN 61000-6-2 32
EN 61000-6-4 32
EN 614-1 32
EN ISO 10218-1 32
EN ISO 12100 32
EN ISO 13849-1 31
EN ISO 13849-2 31
EN ISO 13850 31
Equipamiento de proteccin 19
Explotador 9
O
Observaciones 5
Observaciones sobre responsabilidades 7
Observaciones sobre seguridad 5
Opciones 7
Operador 11
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
N
Normas y prescripciones aplicadas 31
Normativa MFC 8
Normativa sobre construccin de mquinas 8
Normativa sobre instalaciones de baja tensin 8
P
PARADA DE EMERGENCIA, externo 17, 24
PARADA DE EMERGENCIA, local 24
Parada de seguridad 0 9
Parada de seguridad 1 10
Parada de seguridad 2 10
Parada de seguridad STOP 0 9
Parada de seguridad STOP 1 10
33 / 35
Seguridad de los robots industriales
Parada de seguridad STOP 2 10
Parada de seguridad, externa 18
Parada de servicio externa segura 18
Parada de servicio segura 9
Performance Level 14
Personal 11
Posicionador 7
Posicin de pnico 18
Proteccin del operario 14, 16, 22
Prueba de funcionamiento 24
Puesta en servicio 24
Puesta fuera de servicio 29
Pulsador de hombre muerto 17, 22
Pulsadores de hombre muerto 17
Zona de trabajo 9
R
Reacciones de parada 13
Reanudacin del servicio 24
Reparaciones 28
Robot industrial 7
S
Seguridad 7
Seguridad, generalidades 7
Seleccin de modos de servicio 14, 15
Simulacin 27
Single Point of Control 30
smartPAD 9
Sobrecarga 22
Software 7
SPOC 30
STOP 0 9, 10
STOP 1 9, 10
STOP 2 9, 10
T
T1 10
T2 10
Trminos, seguridad 9
Topes finales mecnicos 19
Trabajos de cuidado 29
Trabajos de limpieza 29
Transporte 23
U
Unidad de control del robot 7
Unidad lineal 7
Unidad manual de programacin 7
Uso conforme a lo previsto 7
Usuario 9, 11
Utilizacin, distinta al uso previsto 7
Utilizacin, indebida 7
V
Velocidad, control 19
Vida til 9
Z
Zona de peligro 9
Zona de proteccin 12
Zona de seguridad 9, 13
34 / 35
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
Seguridad de los robots industriales
Edicin: 05.09.2012 Versin: Safety VKR C4 V5 es (PDF)
35 / 35
Вам также может понравиться
- Power Focus 6000 Guía de ConfiguraciónДокумент284 страницыPower Focus 6000 Guía de ConfiguraciónkukaОценок пока нет
- Pf6000 Spanish Pocket GuideДокумент27 страницPf6000 Spanish Pocket GuideBrian PompeiОценок пока нет
- Prog Experto r41 EsДокумент221 страницаProg Experto r41 EsiagomouОценок пока нет
- PowerFocus 6000 Instrucciones Del ProductoДокумент20 страницPowerFocus 6000 Instrucciones Del ProductoCesar ChaconОценок пока нет
- PowerFocus 6000 Instrucciones Del ProductoДокумент20 страницPowerFocus 6000 Instrucciones Del ProductoCesar ChaconОценок пока нет
- PowerScan M8300Документ24 страницыPowerScan M8300kukaОценок пока нет
- BRANSON.100-412-183 DCX S ES Rev4.0Документ126 страницBRANSON.100-412-183 DCX S ES Rev4.0kukaОценок пока нет
- Controller IRC5 With FlexPendantДокумент126 страницController IRC5 With FlexPendantIsmaelОценок пока нет
- Manual Usuario Robot IRB120Документ244 страницыManual Usuario Robot IRB120antonioОценок пока нет
- Introduccion A RAPIDДокумент60 страницIntroduccion A RAPIDRafael Ricardo Beltrán López100% (1)
- 3HAC022349 EsДокумент184 страницы3HAC022349 EskukaОценок пока нет
- 3HAC026660 PM IRB 1600-IRB 1660-EsДокумент418 страниц3HAC026660 PM IRB 1600-IRB 1660-EskukaОценок пока нет
- Chasis PDFДокумент397 страницChasis PDFsnake87vkОценок пока нет
- Informacion Ezm4450Документ2 страницыInformacion Ezm4450kukaОценок пока нет
- NKG3 Programador AstronomicoДокумент8 страницNKG3 Programador AstronomicoCesar L. Inga BuendiaОценок пока нет
- Manual RapidДокумент1 322 страницыManual RapidjosemarazОценок пока нет
- Adk4xx eДокумент30 страницAdk4xx ekukaОценок пока нет
- EgiesДокумент33 страницыEgieskukaОценок пока нет
- VSS 82 END V1 EsДокумент221 страницаVSS 82 END V1 Eskuka100% (1)
- P2077SB ES - 2014 08 - M Pro 400S DGD IS - BTSEДокумент66 страницP2077SB ES - 2014 08 - M Pro 400S DGD IS - BTSEkukaОценок пока нет
- NKG3 Programador AstronomicoДокумент8 страницNKG3 Programador AstronomicoCesar L. Inga BuendiaОценок пока нет
- Manual TPS3200-4000-5000Документ142 страницыManual TPS3200-4000-5000kukaОценок пока нет
- Manual Tps330 450Документ53 страницыManual Tps330 450kuka100% (3)
- Manual de Formación EG - 02SPДокумент83 страницыManual de Formación EG - 02SPkuka100% (1)
- Safety VKR C4 EsДокумент35 страницSafety VKR C4 Eskuka100% (2)
- Guía Rápida Multiprog WTДокумент14 страницGuía Rápida Multiprog WTkukaОценок пока нет
- Pegadura de Tubería de PerforaciónДокумент12 страницPegadura de Tubería de PerforaciónDiego Fabian Ruiz VacaflorОценок пока нет
- Acuerdo E.O.T. Sot.Документ79 страницAcuerdo E.O.T. Sot.ospam ingenieriaОценок пока нет
- Concepto de Arma BlancaДокумент10 страницConcepto de Arma BlancaLu ArОценок пока нет
- B3.tema 12.arte Neoclásico.Документ11 страницB3.tema 12.arte Neoclásico.Vertedero EspinacaОценок пока нет
- Testosterona 2 PDFДокумент1 страницаTestosterona 2 PDFBrian David VianaОценок пока нет
- Viajes PDFДокумент6 страницViajes PDFElizabeth alayoОценок пока нет
- Clase #5 - Historia y Teorías de La AdoelscenciaДокумент8 страницClase #5 - Historia y Teorías de La AdoelscenciaEliana OrtizОценок пока нет
- Nom 035 Analisis de VideoДокумент5 страницNom 035 Analisis de VideoLa Niña YoyisОценок пока нет
- JJJДокумент7 страницJJJJúliaОценок пока нет
- Cartilla Números EnterosДокумент7 страницCartilla Números Enterosf excelОценок пока нет
- MANU Interfer-MicraДокумент50 страницMANU Interfer-MicraThomas PezzolanoОценок пока нет
- Etapas Del Proceso CatastralДокумент6 страницEtapas Del Proceso CatastralClaudia Lissette Lima CoradoОценок пока нет
- S-4 La LecturaДокумент10 страницS-4 La LecturaDaisy Yenny Illa JilajaОценок пока нет
- Ejemplo Primera EntregaДокумент2 страницыEjemplo Primera EntregaAlejandro HernandezОценок пока нет
- Ensayo de Grado FinalДокумент29 страницEnsayo de Grado Finalhenry fernandezОценок пока нет
- JavaScript (Conceptos Básicos y Avanzados)Документ157 страницJavaScript (Conceptos Básicos y Avanzados)Miguel MartinezОценок пока нет
- SarrasineДокумент6 страницSarrasineCory MárquezОценок пока нет
- Tarea 5Документ3 страницыTarea 5ined5puertaparadaОценок пока нет
- Matriz Axiologica 2022 FinalДокумент6 страницMatriz Axiologica 2022 FinalGlorioso Quinientos JaujaОценок пока нет
- Elaboración de Texto LA CONQUISTA DE CHIAPAS. Samuel Cruz ÁlvarezДокумент21 страницаElaboración de Texto LA CONQUISTA DE CHIAPAS. Samuel Cruz ÁlvarezFrida MonserratОценок пока нет
- Toaz - Info Manual Guia de Radiestesia y Geobiologia2doc PRДокумент33 страницыToaz - Info Manual Guia de Radiestesia y Geobiologia2doc PRPedro Martínez100% (1)
- Alfred Radcliffe BrownДокумент3 страницыAlfred Radcliffe BrownMichelle ValenzuelaОценок пока нет
- Trabajo Salud OralДокумент25 страницTrabajo Salud OralLaura GarciaОценок пока нет
- Ese Hospital Oscar Emiro Vergara Cruz Nit: 890.985.660-7 Historia Clinica De: Epicrisis de Atencion de UrgenciasДокумент4 страницыEse Hospital Oscar Emiro Vergara Cruz Nit: 890.985.660-7 Historia Clinica De: Epicrisis de Atencion de UrgenciaskaterineОценок пока нет
- Por Todo MarruecosДокумент412 страницPor Todo MarruecosLisОценок пока нет
- EnergySistem7004UsersManual785084 1386184061Документ102 страницыEnergySistem7004UsersManual785084 1386184061KepaОценок пока нет
- El Lejano País de Los Estanques Dic 2015Документ2 страницыEl Lejano País de Los Estanques Dic 2015Delicias RebornОценок пока нет
- Materias Primas de Francia en La Revolucion Industrial - Búsqueda de GoogleДокумент1 страницаMaterias Primas de Francia en La Revolucion Industrial - Búsqueda de GoogleMaria BallesterОценок пока нет
- REPORTE Practica 6 - Amp - CaДокумент12 страницREPORTE Practica 6 - Amp - CaAlejandro CarmonaОценок пока нет
- Traduccion PanoramicaДокумент21 страницаTraduccion PanoramicaRamon MendezОценок пока нет
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másОт EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másРейтинг: 2.5 из 5 звезд2.5/5 (3)
- La causa raiz de los accidentes: Historias de accidentes en la industriaОт EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaРейтинг: 5 из 5 звезд5/5 (1)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadОт EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadРейтинг: 5 из 5 звезд5/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónОт EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónРейтинг: 5 из 5 звезд5/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.От EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Рейтинг: 5 из 5 звезд5/5 (1)
- Influencia. La psicología de la persuasiónОт EverandInfluencia. La psicología de la persuasiónРейтинг: 4.5 из 5 звезд4.5/5 (14)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.От EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Рейтинг: 4 из 5 звезд4/5 (51)
- EL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialОт EverandEL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaОт EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaРейтинг: 3.5 из 5 звезд3.5/5 (2)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosОт EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosРейтинг: 4 из 5 звезд4/5 (1)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenОт EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenРейтинг: 5 из 5 звезд5/5 (8)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialОт EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasОт EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasРейтинг: 4.5 из 5 звезд4.5/5 (14)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...От EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Рейтинг: 5 из 5 звезд5/5 (4)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaОт EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezРейтинг: 4 из 5 звезд4/5 (3)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaОт EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaРейтинг: 4.5 из 5 звезд4.5/5 (117)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialОт EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialРейтинг: 4.5 из 5 звезд4.5/5 (11)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesОт EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteОт EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteРейтинг: 1 из 5 звезд1/5 (1)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosОт EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosРейтинг: 5 из 5 звезд5/5 (2)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosОт EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosРейтинг: 4 из 5 звезд4/5 (16)