Вам также может понравиться
- Jee Advanced 2014 Chemistry: Paper - 1Документ12 страницJee Advanced 2014 Chemistry: Paper - 1tangphamvanОценок пока нет
- JEE Advanced 2015 PAPER 1 Solutions PDFДокумент39 страницJEE Advanced 2015 PAPER 1 Solutions PDFtangphamvanОценок пока нет
- The Use of GPS and INSДокумент6 страницThe Use of GPS and INStangphamvanОценок пока нет
- ZhaoДокумент13 страницZhaotangphamvanОценок пока нет
- Sensors 15 02496 v3Документ29 страницSensors 15 02496 v3tangphamvanОценок пока нет
- Micro Electromechanical SystemsДокумент21 страницаMicro Electromechanical SystemstangphamvanОценок пока нет
- Inertial Measurement UnitДокумент7 страницInertial Measurement UnittangphamvanОценок пока нет
- GR0177 Solutions Detailed Physics Exam GuideДокумент27 страницGR0177 Solutions Detailed Physics Exam GuideSagar RawalОценок пока нет
- Biến ngẫu nhiênДокумент9 страницBiến ngẫu nhiêntangphamvanОценок пока нет
- MEMS Inertial Measurement UnitДокумент10 страницMEMS Inertial Measurement UnittangphamvanОценок пока нет
- 10 1 1 136 5523Документ7 страниц10 1 1 136 5523tangphamvanОценок пока нет
- GPS Data Processing ReferencesДокумент4 страницыGPS Data Processing ReferencestangphamvanОценок пока нет
- NavigationДокумент7 страницNavigationtangphamvanОценок пока нет
- EKF Tracking Cornell ION2002Документ15 страницEKF Tracking Cornell ION2002tangphamvanОценок пока нет
- Vision-Aided Inertial Navigation for UAV Autonomous LandingДокумент1 страницаVision-Aided Inertial Navigation for UAV Autonomous LandingtangphamvanОценок пока нет
- 02 CertificatesДокумент3 страницы02 CertificatestangphamvanОценок пока нет
- The Design and Realization of A Portable Positioning SystemДокумент20 страницThe Design and Realization of A Portable Positioning SystemtangphamvanОценок пока нет
- Sensor For Aerospace ApplicationДокумент4 страницыSensor For Aerospace ApplicationtangphamvanОценок пока нет
- Wa SC en Ha 12Документ6 страницWa SC en Ha 12tangphamvanОценок пока нет
- Sensors: An Integration of GPS With INS Sensors For Precise Long-Baseline Kinematic PositioningДокумент15 страницSensors: An Integration of GPS With INS Sensors For Precise Long-Baseline Kinematic PositioningtangphamvanОценок пока нет
- ACCELEROMETERSДокумент8 страницACCELEROMETERStangphamvanОценок пока нет
- ZhaoДокумент13 страницZhaotangphamvanОценок пока нет
- Hol2011 - DissertationДокумент165 страницHol2011 - DissertationtangphamvanОценок пока нет
- Study of Strapdown Inertial Navigation Integration AlgorithmsДокумент4 страницыStudy of Strapdown Inertial Navigation Integration AlgorithmstangphamvanОценок пока нет
- ACCELEROMETERSДокумент8 страницACCELEROMETERStangphamvanОценок пока нет
- 123 NavigationДокумент6 страниц123 NavigationtangphamvanОценок пока нет
- English Short StoryДокумент5 страницEnglish Short Storymattiske7Оценок пока нет
- MagcalibДокумент10 страницMagcalibtangphamvanОценок пока нет
- MP-043-17 L I SensorДокумент12 страницMP-043-17 L I SensortangphamvanОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Java Topics To Cover in InterviewsДокумент5 страницJava Topics To Cover in InterviewsHemanth KumarОценок пока нет
- FG - BDER-78 Technical Catalogue - Technical - UNДокумент8 страницFG - BDER-78 Technical Catalogue - Technical - UNAnh Le NgocОценок пока нет
- 9853 1239 01 - COP 54 Service Poster - LOWДокумент1 страница9853 1239 01 - COP 54 Service Poster - LOWValourdos LukasОценок пока нет
- 1 s2.0 S0038080612000790 Main PDFДокумент16 страниц1 s2.0 S0038080612000790 Main PDFJuanSebastianGamezОценок пока нет
- Sallyport MBI Bifold BrochureДокумент6 страницSallyport MBI Bifold BrochureameraldaherОценок пока нет
- Odv-065r18ejj-G DS 2-0-3Документ1 страницаOdv-065r18ejj-G DS 2-0-3Евгений Переверзев0% (1)
- 83 - Detection of Bearing Fault Using Vibration Analysis and Controlling The VibrationsДокумент12 страниц83 - Detection of Bearing Fault Using Vibration Analysis and Controlling The VibrationsmaulikgadaraОценок пока нет
- Technical Specifications: 12 V 18ah AGM 5 YearsДокумент2 страницыTechnical Specifications: 12 V 18ah AGM 5 YearsDaniel EspinozaОценок пока нет
- Power and Simplicity: Pace ScientificДокумент16 страницPower and Simplicity: Pace ScientificAnonymous mNQq7ojОценок пока нет
- Dacnewppt p4Документ21 страницаDacnewppt p4vmspraneethОценок пока нет
- ESD Protection in CMOS: Characterization and Failure AnalysisДокумент113 страницESD Protection in CMOS: Characterization and Failure AnalysisElisavNirolfОценок пока нет
- Compact 1NC+1NO limit switch data sheetДокумент2 страницыCompact 1NC+1NO limit switch data sheetJose AkinoОценок пока нет
- ESAB Welding HandbookДокумент31 страницаESAB Welding Handbookhooky1100% (4)
- Antena Eh para 10 MetrosДокумент3 страницыAntena Eh para 10 Metros10sd156Оценок пока нет
- Nature of Acidity and Lime Requirement in Acid Soils of ManipurДокумент8 страницNature of Acidity and Lime Requirement in Acid Soils of ManipurIJASRETОценок пока нет
- Struts by Kamalakar DanduДокумент237 страницStruts by Kamalakar DanduKamalakar DanduОценок пока нет
- 06-Fc428mar Water-in-Fuel Indicator Sensor Circuit - Voltage Above Normal or Shorted To High SourceДокумент3 страницы06-Fc428mar Water-in-Fuel Indicator Sensor Circuit - Voltage Above Normal or Shorted To High SourceSuryadiОценок пока нет
- SRSUNTOUR General Fork GlossaryДокумент23 страницыSRSUNTOUR General Fork GlossaryThomas JunkersfeldОценок пока нет
- VGS 8.1.2 Rev.20 - UTДокумент29 страницVGS 8.1.2 Rev.20 - UTPaul-Petrus MogosОценок пока нет
- Motion ReportДокумент2 страницыMotion Reportmikeb-erau100% (2)
- Micron Ezeprox Access Control KeypadДокумент4 страницыMicron Ezeprox Access Control KeypadThuy VuОценок пока нет
- 01 4G64S4M & 4G69S4N Engine-2Документ38 страниц01 4G64S4M & 4G69S4N Engine-2vitor santosОценок пока нет
- List of Linkages2016Документ74 страницыList of Linkages2016engrwho0% (1)
- 02 - Critical Customers Complains enДокумент8 страниц02 - Critical Customers Complains enKJDNKJZEF100% (1)
- Hino 500S Catalog LR PDFДокумент8 страницHino 500S Catalog LR PDFZulОценок пока нет
- Piping Vibration: Causes, Limits & Remedies: Public Courses In-House Courses Operator TrainingДокумент12 страницPiping Vibration: Causes, Limits & Remedies: Public Courses In-House Courses Operator Trainingmember1000100% (1)
- Sinusverteiler Multivalent SolutionsДокумент13 страницSinusverteiler Multivalent SolutionsIon ZabetОценок пока нет
- The Z-Transform: Introduction and DerivationДокумент16 страницThe Z-Transform: Introduction and DerivationAnanth SettyОценок пока нет
- 3RInternational Tetzner Model Based Pipeline LDS 07-2003 PDFДокумент6 страниц3RInternational Tetzner Model Based Pipeline LDS 07-2003 PDFRene ParedesОценок пока нет
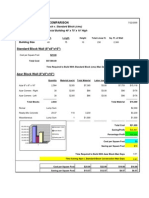
- AZAR Block CostcomparisonДокумент8 страницAZAR Block CostcomparisontckittuОценок пока нет