Вам также может понравиться
- Preliminary 5.0 V-only Flash Memory DatasheetДокумент35 страницPreliminary 5.0 V-only Flash Memory DatasheetAhmad0% (1)
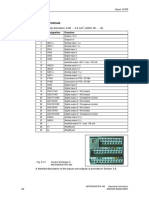
- 38 PinДокумент2 страницы38 Pinfilonzi85Оценок пока нет
- Final Solution For Chinese VAGCOM Interfaces With Protection Chip and FT232RДокумент5 страницFinal Solution For Chinese VAGCOM Interfaces With Protection Chip and FT232Rivirgil100% (1)
- Read Write SRS MCU CAN Eng PDFДокумент13 страницRead Write SRS MCU CAN Eng PDFFlorin MoneaОценок пока нет
- BMW Mini Rolls Royce ECU CAFD ID's (Through ISTA P 3.61.5)Документ2 страницыBMW Mini Rolls Royce ECU CAFD ID's (Through ISTA P 3.61.5)kenjyaitcОценок пока нет
- Kangoo SID 301 304 PDFДокумент17 страницKangoo SID 301 304 PDFGsmHelpОценок пока нет
- Bosch Me7.4.4 PolarisДокумент3 страницыBosch Me7.4.4 PolariscatoleОценок пока нет
- Marvell - WiFi Chip 8686Документ6 страницMarvell - WiFi Chip 8686openid_cRw9IB6KОценок пока нет
- CARPROG MB Key Programmer ManualДокумент7 страницCARPROG MB Key Programmer Manualcameraman01Оценок пока нет
- VW immobiliser emulator installation guideДокумент7 страницVW immobiliser emulator installation guideJustin LeoОценок пока нет
- PSA BSI Module Wiring DiagramsДокумент9 страницPSA BSI Module Wiring Diagramssergiorad100% (1)
- Abrites Diagnostics for VAG User Manual 4.8Документ207 страницAbrites Diagnostics for VAG User Manual 4.8Oleg MyronaОценок пока нет
- SM2 J2534 RP1210 Guide EngДокумент24 страницыSM2 J2534 RP1210 Guide Engilie eliah100% (1)
- CARPROG Motorola HC08 Programmer ManualДокумент8 страницCARPROG Motorola HC08 Programmer Manualcameraman01Оценок пока нет
- Bosch M798 Kia ECU Connection GuideДокумент4 страницыBosch M798 Kia ECU Connection GuideAndres SolanoОценок пока нет
- Condition: 90 Audi Virtual Cockpit Map Section Displayed Inside The SpeedometerДокумент4 страницыCondition: 90 Audi Virtual Cockpit Map Section Displayed Inside The SpeedometerMartsinovskyi MykhaildОценок пока нет
- KWP2000 ManualДокумент20 страницKWP2000 ManualWolfgang Starkmann50% (2)
- How to connect and program vehicle ECUДокумент4 страницыHow to connect and program vehicle ECUrumellemur59Оценок пока нет
- How to read and program Fiat immobilizer IMM 009.10Документ3 страницыHow to read and program Fiat immobilizer IMM 009.10Oscar GonzalezОценок пока нет
- 3.2 L 177 KW Motronic, Engine Code BFHДокумент19 страниц3.2 L 177 KW Motronic, Engine Code BFHJohn StauntonОценок пока нет
- HiTag2 Manual EngДокумент8 страницHiTag2 Manual EngVASEKОценок пока нет
- Esys Flasher User's ManualДокумент8 страницEsys Flasher User's ManualThiago Techscan Henrique TechscanОценок пока нет
- AP3213211 TriCore AUDO F Bootloader PDFДокумент40 страницAP3213211 TriCore AUDO F Bootloader PDFFiliberto Conde MayoОценок пока нет
- EEPROM, EPROM and FLASH Memory Guide for Bosch, Ford, Grundig and MoreДокумент3 страницыEEPROM, EPROM and FLASH Memory Guide for Bosch, Ford, Grundig and MoreOscar GonzalezОценок пока нет
- CARPROG User ManualДокумент5 страницCARPROG User ManualNv Thái0% (1)
- Audi A4 OBDДокумент27 страницAudi A4 OBDRodolfo DiazОценок пока нет
- Audi A8 1997-1999 Dash PinoutsДокумент9 страницAudi A8 1997-1999 Dash PinoutsNestor MansipeОценок пока нет
- Toyota 2018Документ4 страницыToyota 2018Dreg Ro100% (1)
- Micronas CDC 3217G-CДокумент26 страницMicronas CDC 3217G-CTeodoran DoruОценок пока нет
- VAG-COM Guide Immobilizer 3 Measuring BlocksДокумент3 страницыVAG-COM Guide Immobilizer 3 Measuring BlockseliahОценок пока нет
- Immobiliser Function Diagnostic GuideДокумент2 страницыImmobiliser Function Diagnostic GuideVlade NaumovskiОценок пока нет
- Can Filter RX - RX Mercedes W166, W246: Block Synchro EZS-Dashboard (Required)Документ2 страницыCan Filter RX - RX Mercedes W166, W246: Block Synchro EZS-Dashboard (Required)KIREОценок пока нет
- Immobilizer Fiat (IMM 009.10) : OverviewДокумент3 страницыImmobilizer Fiat (IMM 009.10) : Overviewsimooo32Оценок пока нет
- Volkswagen Touran 1.4 TSI Logbook Activation of MKE Using ODIS-EДокумент7 страницVolkswagen Touran 1.4 TSI Logbook Activation of MKE Using ODIS-Ealmia tronicsОценок пока нет
- Super Vag K Can v4.8 User Manual PDFДокумент11 страницSuper Vag K Can v4.8 User Manual PDFroberto caiado100% (1)
- C167 Bootstrap SYSCON External RAMДокумент26 страницC167 Bootstrap SYSCON External RAMJosé AdelinoОценок пока нет
- Lp133wh1 Tpd1 LGДокумент32 страницыLp133wh1 Tpd1 LGjohnel ruszkiОценок пока нет
- Revoflash 3 r19 Vag Ecu List v08 05Документ6 страницRevoflash 3 r19 Vag Ecu List v08 05Gasper Ceballos100% (1)
- BMW Cas 4 9s12c64Документ2 страницыBMW Cas 4 9s12c64arielfoxtoolsОценок пока нет
- Connect Microcontrollers Using V850ES.hpx V3.4 ExamplesДокумент6 страницConnect Microcontrollers Using V850ES.hpx V3.4 ExamplesVictor RamalhoОценок пока нет
- Info Windows 8.1 TorrentДокумент1 страницаInfo Windows 8.1 TorrentRadu CroitoruОценок пока нет
- Carprog Basics - 2012 - 04 - 25 - 1Документ2 страницыCarprog Basics - 2012 - 04 - 25 - 1Nv TháiОценок пока нет
- Audi Q5: Dashboard Photo: Required Cable (S)Документ2 страницыAudi Q5: Dashboard Photo: Required Cable (S)MarinaBogaoОценок пока нет
- 01-12 Diagnostic Trouble Code Memory Checking PDFДокумент49 страниц01-12 Diagnostic Trouble Code Memory Checking PDFmefisto06cОценок пока нет
- KWP 2000Документ4 страницыKWP 2000mazacotesОценок пока нет
- Electude Simulator Challenge - Level 1Документ1 страницаElectude Simulator Challenge - Level 1dank12375% (4)
- Car BaseДокумент90 страницCar BaseJUANОценок пока нет
- Special cable for reading Mercedes-Benz EZS CPU EEPROMДокумент11 страницSpecial cable for reading Mercedes-Benz EZS CPU EEPROMwadimОценок пока нет
- Circuit diagram analysis and component identificationДокумент3 страницыCircuit diagram analysis and component identificationluischanguiОценок пока нет
- KESS OBD TURNING KIT SUPPORTS MANY ALFA AND AUDI MODELSДокумент30 страницKESS OBD TURNING KIT SUPPORTS MANY ALFA AND AUDI MODELSRoger SegoОценок пока нет
- DaVinci Deluxe Supported ListДокумент16 страницDaVinci Deluxe Supported ListPaweł KorobajłoОценок пока нет
- DatasheetДокумент50 страницDatasheetLuis BarbosaОценок пока нет
- VW Golf7 2014 SPC560P50: WWW - Eldb.euДокумент1 страницаVW Golf7 2014 SPC560P50: WWW - Eldb.euDani100% (1)
- SD Creation Guide For Kess V2Документ8 страницSD Creation Guide For Kess V2Remigijus BrazasОценок пока нет
- Am29LV800T/Am29LV800B: 8 Megabit (1,048,576 X 8-Bit/524,288 X 16-Bit) CMOS 3.0 Volt-Only, Sectored Flash MemoryДокумент48 страницAm29LV800T/Am29LV800B: 8 Megabit (1,048,576 X 8-Bit/524,288 X 16-Bit) CMOS 3.0 Volt-Only, Sectored Flash Memorygiapy0000Оценок пока нет
- 29F400Документ35 страниц29F400Javi ChitoОценок пока нет
- Am29F160D: Data SheetДокумент46 страницAm29F160D: Data Sheetraulpalav2775100% (1)
- Data SheetДокумент37 страницData SheetDardan HusiОценок пока нет
- Am29f040b Amd (Ci 15)Документ30 страницAm29f040b Amd (Ci 15)spique 4Оценок пока нет
- DantrafoДокумент64 страницыDantrafoAnonymous Wyb8Y1Оценок пока нет
- Profibus Mapping For S120 Apc Epos Fb120: Application NotesДокумент9 страницProfibus Mapping For S120 Apc Epos Fb120: Application NotesAhmadОценок пока нет
- ABB ACS880 Regenerative Rectifier CTRL PRG FW C A4Документ194 страницыABB ACS880 Regenerative Rectifier CTRL PRG FW C A4AhmadОценок пока нет
- Engine Control UnitДокумент21 страницаEngine Control UnithanifОценок пока нет
- Mn33a102 S7 - FC300Документ10 страницMn33a102 S7 - FC300InduAutomationОценок пока нет
- Ari 4Документ1 страницаAri 4AhmadОценок пока нет
- Vacon Control Panel: Page 68Документ3 страницыVacon Control Panel: Page 68AhmadОценок пока нет
- p2149 (0... N) Monitoring Configuration / Monit Config: Parameter List of ParametersДокумент8 страницp2149 (0... N) Monitoring Configuration / Monit Config: Parameter List of ParametersAhmadОценок пока нет
- Simodrive 611U Fault AlarmДокумент93 страницыSimodrive 611U Fault AlarmAhmad100% (1)
- Figure 2-11 Topology of NPC Leg With Switching States and Corresponding Output Voltages (Rodriguez, Et Al., 2009 P. 1789)Документ1 страницаFigure 2-11 Topology of NPC Leg With Switching States and Corresponding Output Voltages (Rodriguez, Et Al., 2009 P. 1789)AhmadОценок пока нет
- Micromaster 440 TerminalsДокумент1 страницаMicromaster 440 TerminalsAhmadОценок пока нет
- Profibus Module If-964 DP: Technical SpecificationsДокумент3 страницыProfibus Module If-964 DP: Technical SpecificationsAhmadОценок пока нет
- Fault Messages and List of FaultsДокумент5 страницFault Messages and List of FaultsAhmadОценок пока нет
- Combinations of Switch Positions U V WДокумент1 страницаCombinations of Switch Positions U V WAhmadОценок пока нет
- Figure 2-9 Sine-Triangle Modulation With Third Harmonic Injection (Solbakken, 2017)Документ1 страницаFigure 2-9 Sine-Triangle Modulation With Third Harmonic Injection (Solbakken, 2017)AhmadОценок пока нет
- Figure 2-5 Module Housings For Igbt, (A) Infineon Technologies Ihv/Ihm, (B) Infineon Technologies Xhp3, (C) Abbs Statpak (Press-Pack Igbt)Документ1 страницаFigure 2-5 Module Housings For Igbt, (A) Infineon Technologies Ihv/Ihm, (B) Infineon Technologies Xhp3, (C) Abbs Statpak (Press-Pack Igbt)AhmadОценок пока нет
- STEP 7 - Programming With STEP 7Документ702 страницыSTEP 7 - Programming With STEP 7Adi HorgaОценок пока нет
- Gate Drive For High Speed, High Power IgbtsДокумент4 страницыGate Drive For High Speed, High Power IgbtsAhmadОценок пока нет
- Elementary Datatypes PDFДокумент1 страницаElementary Datatypes PDFSohail AhmedОценок пока нет
- Data Blocks SiemensДокумент17 страницData Blocks Siemensvillabajo000Оценок пока нет
- IGBT Overcurrent and Short Circuit Protection in Industrial Motor Drives PDFДокумент6 страницIGBT Overcurrent and Short Circuit Protection in Industrial Motor Drives PDFprathap394Оценок пока нет
- TL783 High-Voltage Adjustable Regulator: 1 Features 3 DescriptionДокумент27 страницTL783 High-Voltage Adjustable Regulator: 1 Features 3 DescriptionAhmadОценок пока нет
- Fiber Optic Receiver: OPF2416, OPF2416T, OPF2416TCДокумент3 страницыFiber Optic Receiver: OPF2416, OPF2416T, OPF2416TCAhmadОценок пока нет
- FC Vs FBДокумент8 страницFC Vs FBMiguel SanchesОценок пока нет
- Filsecker 2014 ConverterДокумент10 страницFilsecker 2014 ConverterAhmadОценок пока нет
- Siemens Front ConnectorsДокумент16 страницSiemens Front Connectorsrobertz_tolentino014Оценок пока нет
- Diplomityö Ilonen LariДокумент60 страницDiplomityö Ilonen LariAhmadОценок пока нет
- DV/DT Filter: User ManualДокумент37 страницDV/DT Filter: User ManualAhmadОценок пока нет
- 2012 ISRO IISc STC ReportДокумент149 страниц2012 ISRO IISc STC ReportAhmadОценок пока нет
- MG90N402 PDFДокумент41 страницаMG90N402 PDFAdisuОценок пока нет
- Servo Driver Operation Manual (V1.01)Документ89 страницServo Driver Operation Manual (V1.01)Airport Central Club NedumbasseryОценок пока нет
- 3.5A Switching Regulator: Multipower BCD TechnologyДокумент23 страницы3.5A Switching Regulator: Multipower BCD TechnologyErasmo Franco SОценок пока нет
- Gen4 IODДокумент21 страницаGen4 IODElectroventica ElectroventicaОценок пока нет
- P89LPC9401: 1. General DescriptionДокумент59 страницP89LPC9401: 1. General DescriptionTulio LeonОценок пока нет
- Alen Bradley Ultra 100Документ300 страницAlen Bradley Ultra 100Mikica01Оценок пока нет
- ACT8846 DatasheetДокумент44 страницыACT8846 DatasheetsecretobcnОценок пока нет
- High Performance, Single Synchronous Step-Down Controller For Notebook Power SupplyДокумент27 страницHigh Performance, Single Synchronous Step-Down Controller For Notebook Power Supplyzigmund zigmundОценок пока нет
- Current-Limited, Power-Distribution Switches: Features ApplicationsДокумент51 страницаCurrent-Limited, Power-Distribution Switches: Features Applicationsdavi18Оценок пока нет
- 5 Pin Interface, Version 2.9, 01.02.2010Документ10 страниц5 Pin Interface, Version 2.9, 01.02.2010msalem73Оценок пока нет
- TC358765XBG Datasheet en 20180404Документ26 страницTC358765XBG Datasheet en 20180404Ku MahОценок пока нет
- Models UT350/UT320 Digital Indicating Controllers User's ManualДокумент84 страницыModels UT350/UT320 Digital Indicating Controllers User's ManualhubkenОценок пока нет
- WSC 001Документ58 страницWSC 001Tịnh TrầnОценок пока нет
- Time Operated Electrical Appliance Control SystemДокумент82 страницыTime Operated Electrical Appliance Control Systempoozu100% (1)
- FR-E840-0170 BLOW InverterДокумент78 страницFR-E840-0170 BLOW InverterAbdul HameedОценок пока нет
- Transistor As A Switch - Using Transistor SwitchingДокумент11 страницTransistor As A Switch - Using Transistor SwitchingDilpreet SinghОценок пока нет
- IO Wiring DiagramsДокумент172 страницыIO Wiring DiagramsNikola MilosevicОценок пока нет
- Watlow Temperature and ProcessДокумент24 страницыWatlow Temperature and ProcessEliasОценок пока нет
- Datasheet 7404Документ11 страницDatasheet 7404Mayra Gloricel Ramirez GarciaОценок пока нет
- Azbil, MagneW3000 FLEX Electromagnetic Flowmeter Converter 7th EdДокумент16 страницAzbil, MagneW3000 FLEX Electromagnetic Flowmeter Converter 7th EdRangga TaufiqurahmanОценок пока нет
- MC33972Документ32 страницыMC33972Chen josephОценок пока нет
- Matrix Eng PDFДокумент2 страницыMatrix Eng PDFAnonymous Jv5Cs48dОценок пока нет
- OZ810Документ5 страницOZ810kanat_altimimiОценок пока нет
- HV5222Документ6 страницHV5222zokiОценок пока нет
- PW8 Programming GuideДокумент28 страницPW8 Programming GuideSafwat FarrahОценок пока нет
- User Manual: 2-Phase Digital Stepper DriveДокумент15 страницUser Manual: 2-Phase Digital Stepper DriveSDKОценок пока нет
- 5500457X 1 ENG 2008-05 Ewon Modem Router eWON2005CDДокумент33 страницы5500457X 1 ENG 2008-05 Ewon Modem Router eWON2005CDzinebОценок пока нет
- ATS01N209QN: Product DatasheetДокумент5 страницATS01N209QN: Product DatasheethajhdjОценок пока нет
- File W3G800KS3903 323881 DB ENДокумент7 страницFile W3G800KS3903 323881 DB ENAykut BacakОценок пока нет
- GPD 205 Technical Manual: Magne TekДокумент88 страницGPD 205 Technical Manual: Magne TekUsman ShahОценок пока нет
- 6A, 23V Synchronous Step-Down Converter With 3.3V/5V LDO: RT6256B/CДокумент20 страниц6A, 23V Synchronous Step-Down Converter With 3.3V/5V LDO: RT6256B/CkiryanoffОценок пока нет