Вам также может понравиться
- Synchronous MotorsДокумент25 страницSynchronous MotorsParvesh NainОценок пока нет
- Injection of EMF in The Rotor CircuitДокумент3 страницыInjection of EMF in The Rotor CircuitAbhishekGuptaОценок пока нет
- 4 - Types of DC Chopper PDFДокумент38 страниц4 - Types of DC Chopper PDFPrem KumarОценок пока нет
- Week 71Документ25 страницWeek 71Raphael SebucОценок пока нет
- 3phase Induction Motor (Sukhpreet)Документ17 страниц3phase Induction Motor (Sukhpreet)Ankesh KunwarОценок пока нет
- DC MachinesДокумент52 страницыDC MachinesArun Kumar100% (1)
- Synchronous GeneratorsДокумент17 страницSynchronous GeneratorsAman AnsariОценок пока нет
- Difference Between Single Phase Wiring and Three Phase (Latest)Документ14 страницDifference Between Single Phase Wiring and Three Phase (Latest)shumwenjunОценок пока нет
- Asynchronous Machines Tutorial Sheets (EL-208Документ10 страницAsynchronous Machines Tutorial Sheets (EL-208Kushagra BhatiaОценок пока нет
- Unit 3Документ5 страницUnit 3Narasimman DonОценок пока нет
- The Induction Motor: A Detailed Look at Its Operation and CharacteristicsДокумент13 страницThe Induction Motor: A Detailed Look at Its Operation and CharacteristicsAsimОценок пока нет
- HET 225 HEt 228 Tutorial 3 Solution S2 2014Документ4 страницыHET 225 HEt 228 Tutorial 3 Solution S2 2014Ibrahim Hussain0% (1)
- Chapter 5 AC ConverterДокумент27 страницChapter 5 AC ConverterArjun KumarОценок пока нет
- Magenetic Chip Collector New 2Документ27 страницMagenetic Chip Collector New 2Hemasundar Reddy JolluОценок пока нет
- Chapter 1 DC Drives Part1Документ46 страницChapter 1 DC Drives Part1Mohammad MunzirОценок пока нет
- Why Induction Motors Are Commonly Used in IndustryДокумент65 страницWhy Induction Motors Are Commonly Used in IndustryAhmad Nawawi Ngah100% (1)
- Measure AC Voltages Using an AC PotentiometerДокумент3 страницыMeasure AC Voltages Using an AC PotentiometerNh Chuminda Yapa100% (1)
- PX7203-Special Electrical Machines PDFДокумент11 страницPX7203-Special Electrical Machines PDFvaishnavisriОценок пока нет
- EquivalEquivalent Circuit of Single-Phase Induction Motorent Circuit of Single-Phase Induction MotorДокумент13 страницEquivalEquivalent Circuit of Single-Phase Induction Motorent Circuit of Single-Phase Induction Motoraili_avinashОценок пока нет
- Unit2 MachinesДокумент35 страницUnit2 MachinesdineshkumarОценок пока нет
- 45 24985 EE328 2016 1 2 1 Lecture7Документ11 страниц45 24985 EE328 2016 1 2 1 Lecture7Shimaa ashrafОценок пока нет
- DC-DC ConverterДокумент24 страницыDC-DC ConverterkandularanjithОценок пока нет
- Chapter 3 Synchronous GeneratorДокумент21 страницаChapter 3 Synchronous Generatorahmad abufaresОценок пока нет
- Hunting in Synchronous Motor - Electrical4u PDFДокумент5 страницHunting in Synchronous Motor - Electrical4u PDFRishiSunariya0% (1)
- EE 442 642 IntroductionДокумент14 страницEE 442 642 IntroductionUSERNAME12340987Оценок пока нет
- Machies Singly ExcitedДокумент15 страницMachies Singly ExcitedMohamed ElfekyОценок пока нет
- Induction Motor Electric BrakingДокумент12 страницInduction Motor Electric Brakingmastanamma.Y100% (1)
- Unit Iii Induction Motor Drives: Dept. of EEEДокумент17 страницUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarОценок пока нет
- DC Motor Speed ControllerДокумент22 страницыDC Motor Speed ControllerShafqt MbrkОценок пока нет
- Single-Phase Induction MotorsДокумент82 страницыSingle-Phase Induction MotorsVinay PrakashОценок пока нет
- DC-DC Converter Guide for BeginnersДокумент98 страницDC-DC Converter Guide for BeginnersHarsha Anantwar100% (1)
- Three Phase Synchronous MachinesДокумент14 страницThree Phase Synchronous MachinesMohdFirdausОценок пока нет
- III Eee 05 Ee8501 Psa Unit 1Документ37 страницIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANОценок пока нет
- AC Series Motor Modifications for AC SupplyДокумент15 страницAC Series Motor Modifications for AC SupplyMani Balaji TОценок пока нет
- Indian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringДокумент4 страницыIndian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringKool PrashantОценок пока нет
- Experiment - 12: Power Angle Curve of Syncronous MachineДокумент3 страницыExperiment - 12: Power Angle Curve of Syncronous MachinesanjuОценок пока нет
- DC MachinesДокумент49 страницDC MachinesAshfaq AbibОценок пока нет
- Induction MoterДокумент20 страницInduction MoterShafiuddin HabeebОценок пока нет
- DC Generator Principles ExplainedДокумент15 страницDC Generator Principles ExplainedAjay Talajiya0% (1)
- Induction GeneratorДокумент12 страницInduction GeneratorSumaira SaifОценок пока нет
- D C Machines-IntroductionДокумент25 страницD C Machines-Introductionprashanth6876050% (2)
- Part BДокумент10 страницPart BVenkat ManiОценок пока нет
- EMMI Lab PDFДокумент31 страницаEMMI Lab PDFSarithareddy AvuluriОценок пока нет
- Poly Phase Induction Motors in Power PlantsДокумент58 страницPoly Phase Induction Motors in Power PlantsDipikaОценок пока нет
- EM II ProblemsДокумент4 страницыEM II ProblemsTony StarkОценок пока нет
- EED370 Syllabus Switched Mode Power ConvertersДокумент1 страницаEED370 Syllabus Switched Mode Power Converterssidharth aggarwalОценок пока нет
- Eeeviews: Unit Iv Synchronous Motor DrivesДокумент26 страницEeeviews: Unit Iv Synchronous Motor Driveskrithikgokul selvamОценок пока нет
- Sri Jayachamarajendra College of EngineeringДокумент13 страницSri Jayachamarajendra College of EngineeringFernando Desengkie SangmaОценок пока нет
- DCMTДокумент37 страницDCMTGloria HolcombОценок пока нет
- DC Machines: Parts of DC MachineДокумент51 страницаDC Machines: Parts of DC MachineKUMARОценок пока нет
- Introduction To Electrical DrivesДокумент18 страницIntroduction To Electrical DrivesRohidah SaimunОценок пока нет
- Speeed ControlДокумент3 страницыSpeeed ControlChristine GomezОценок пока нет
- Phasor Representation of ACДокумент21 страницаPhasor Representation of ACKavitha NaikОценок пока нет
- DC Motor S: Anand 08338958770Документ79 страницDC Motor S: Anand 08338958770Rohit AvasthiОценок пока нет
- Power Electronics Converters and their Control for Renewable Energy ApplicationsОт EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikОценок пока нет
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977От EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Оценок пока нет
- Abstract For FActs ControllerДокумент1 страницаAbstract For FActs ControllerAaryanОценок пока нет
- ISRO 17 EE Questions PDFДокумент16 страницISRO 17 EE Questions PDFAaryanОценок пока нет
- National Institute of Technology Agartala: Student Information General InfoДокумент5 страницNational Institute of Technology Agartala: Student Information General InfoAaryanОценок пока нет
- 3rd Alternative-The - Covey.EBS PDFДокумент8 страниц3rd Alternative-The - Covey.EBS PDFbakuri0% (1)
- EnergyДокумент20 страницEnergyapi-286291732Оценок пока нет
- Evaluating Fourier Transforms With MATLABДокумент11 страницEvaluating Fourier Transforms With MATLABAhsan Ratyal100% (1)
- Circle DiagramДокумент1 страницаCircle DiagramZaid Al-AliОценок пока нет
- Artic Cat 1990 - 1998Документ500 страницArtic Cat 1990 - 1998Garrett Ross83% (6)
- Vehicle Specifications LADA Granta Cross LADAДокумент1 страницаVehicle Specifications LADA Granta Cross LADARoy Eber Gutierrez TamboОценок пока нет
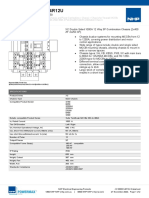
- XC10002X4R12U 11894 DatasheetДокумент2 страницыXC10002X4R12U 11894 DatasheetSteve SimpsonОценок пока нет
- Communications & Signal Systems OverviewДокумент27 страницCommunications & Signal Systems OverviewChristian MuliОценок пока нет
- Unicorn LyteДокумент25 страницUnicorn LyteAbbajirao S KulkarniОценок пока нет
- Motor StepperДокумент4 страницыMotor Stepperfavour ukpai100% (1)
- Nfpa70 PDFДокумент31 страницаNfpa70 PDFm.abdelsalam77257050% (2)
- Fuel Optimized: Specification SheetДокумент3 страницыFuel Optimized: Specification SheetTesla GeneradoresОценок пока нет
- Performance ChecklistДокумент3 страницыPerformance ChecklistAnonymous 37aPhVwsYОценок пока нет
- Catalytic Converter R18a1Документ5 страницCatalytic Converter R18a1Chanabodee KittidumrungsukОценок пока нет
- JD 110 TLB Transmission Controls Parts ListДокумент10 страницJD 110 TLB Transmission Controls Parts Listtecnicogato27Оценок пока нет
- DOPP232Документ5 страницDOPP232Dennis Garces ZaldivarОценок пока нет
- 2 Phase Hybrid Stepper Motor Specifications and DimensionsДокумент1 страница2 Phase Hybrid Stepper Motor Specifications and DimensionsJulio ConfortoОценок пока нет
- Branch Reinforcement For CS PipeДокумент2 страницыBranch Reinforcement For CS PipeSubhash Kumar33% (3)
- 5 Best Mini Vacuums Reviews of 2020 in The UK - BestAdvisers - Co.ukДокумент1 страница5 Best Mini Vacuums Reviews of 2020 in The UK - BestAdvisers - Co.ukJason WalkerОценок пока нет
- Core Memory: Core Memory Consist of Ferrite Cores. Core Memory Is A Form of Non-Volatile Memory. Used 1950 .. 2000Документ13 страницCore Memory: Core Memory Consist of Ferrite Cores. Core Memory Is A Form of Non-Volatile Memory. Used 1950 .. 2000pragyan pandaОценок пока нет
- Obsolete Product(s) - Obsolete Product(s) : Quad Channel High-Side DriverДокумент28 страницObsolete Product(s) - Obsolete Product(s) : Quad Channel High-Side DriverDanny Alexander Bodegas pinedaОценок пока нет
- Ls1 Engine Installation Guide: Design and NotesДокумент36 страницLs1 Engine Installation Guide: Design and Noteskham383100% (7)
- Piaggio X9250Документ75 страницPiaggio X9250Toni MarasovicОценок пока нет
- RT809F TutorialLlogic Board Gamma Chip BUF16821Документ7 страницRT809F TutorialLlogic Board Gamma Chip BUF16821Sk WongОценок пока нет
- Data TransmissionДокумент2 страницыData TransmissionjakimlmОценок пока нет
- General Information: Section 0BДокумент3 772 страницыGeneral Information: Section 0BLeandro Lcar AutomotivoОценок пока нет
- Electrical - PPT - V 03 01 17Документ55 страницElectrical - PPT - V 03 01 17IMRANОценок пока нет
- DC Current Hall Effect Sensor PDFДокумент2 страницыDC Current Hall Effect Sensor PDFbramhОценок пока нет
- End of Line Terster: Nikolay Dilanov /quality Manager YBEY&YBESДокумент7 страницEnd of Line Terster: Nikolay Dilanov /quality Manager YBEY&YBESNikolay DilanovОценок пока нет
- DL-RS1: User's ManualДокумент58 страницDL-RS1: User's ManualLiêm HiếuОценок пока нет
- Power Pavers SF-1700 Parts ManualДокумент77 страницPower Pavers SF-1700 Parts ManualJulian Fraile100% (3)
- Tda7396 PDFДокумент11 страницTda7396 PDFAgustinus ParebongОценок пока нет
- 8086 Microprocessor ArchitectureДокумент5 страниц8086 Microprocessor ArchitectureSanjay SharmaОценок пока нет
- Cable Fault Location ProcedureДокумент12 страницCable Fault Location ProcedureAshari Endra100% (1)