Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- NaviPac Configuration1Документ63 страницыNaviPac Configuration1sahal arifinОценок пока нет
- Tiangulation Control Surveys: Control by Traversing. With Traversing, A Series of HorizontalДокумент25 страницTiangulation Control Surveys: Control by Traversing. With Traversing, A Series of Horizontalnicole pampangaОценок пока нет
- Surveys GPSДокумент42 страницыSurveys GPSovielvОценок пока нет
- Navigation With FormulaДокумент18 страницNavigation With FormulaVodz Navigator100% (1)
- ICAO Annex 14 Volume 1Документ98 страницICAO Annex 14 Volume 1Mehdi Shamsi0% (1)
- Geodesy, BomfordДокумент460 страницGeodesy, Bomfordandresmejia68100% (8)
- Trimble Business Center ManualДокумент142 страницыTrimble Business Center ManualMichael Andres100% (1)
- ICAO Annex 14 Vol 2 Heliports 4th EdДокумент120 страницICAO Annex 14 Vol 2 Heliports 4th Edcadjan06100% (5)
- Furuno GP30-35 GPS Operators ManualДокумент67 страницFuruno GP30-35 GPS Operators Manualjsdoodnath100% (1)
- Power Electronics Testings Turnkey Test & Automation Solution Provider LED Power Driver Test SolutionLED-DriverTest-EДокумент8 страницPower Electronics Testings Turnkey Test & Automation Solution Provider LED Power Driver Test SolutionLED-DriverTest-EPutra JambakОценок пока нет
- Science Demfos PDFДокумент106 страницScience Demfos PDFgirish19Оценок пока нет
- CD772 ProductsData Sanwa Electric Instrument Co., LTDДокумент1 страницаCD772 ProductsData Sanwa Electric Instrument Co., LTDPutra JambakОценок пока нет
- Brosur Inverter 500wДокумент1 страницаBrosur Inverter 500wJhon SyalfiandyОценок пока нет
- Data Sheet GP-635T-121130Документ17 страницData Sheet GP-635T-121130Putra JambakОценок пока нет
- MEP TrainingДокумент11 страницMEP TrainingPutra JambakОценок пока нет
- L6562DДокумент16 страницL6562Dcarlos amayaОценок пока нет
- Leaflet ISO 14001 SML PDFДокумент2 страницыLeaflet ISO 14001 SML PDFPutra JambakОценок пока нет
- TeeehaaapeeДокумент5 страницTeeehaaapeePutra JambakОценок пока нет
- Video 4 PDFДокумент8 страницVideo 4 PDFPutra JambakОценок пока нет
- High-Power Generators For Offshore Wind TurbinesДокумент10 страницHigh-Power Generators For Offshore Wind TurbinesPutra JambakОценок пока нет
- Vishay Semiconductors: FeaturesДокумент3 страницыVishay Semiconductors: FeaturesAlfredo Namigtle JimenezОценок пока нет
- Data Shet IC Rectifire Bridge Vishay General Semiconductor Kbl005Документ4 страницыData Shet IC Rectifire Bridge Vishay General Semiconductor Kbl005Putra JambakОценок пока нет
- NE555Документ6 страницNE555Sebastian DavidОценок пока нет
- L293D Motor Driver DatasheetДокумент14 страницL293D Motor Driver DatasheetAnkit Daftery100% (3)
- U Re Not AloneДокумент1 страницаU Re Not AlonePutra JambakОценок пока нет
- Dear GodДокумент3 страницыDear GodPutra JambakОценок пока нет
- Surveying Field Practice AssignmentДокумент38 страницSurveying Field Practice AssignmentFraol TesfalemОценок пока нет
- 6th Social Science, Chapter - 5 PPT, LAND STORY and THINGSДокумент21 страница6th Social Science, Chapter - 5 PPT, LAND STORY and THINGSsainudheenОценок пока нет
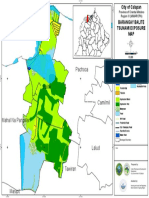
- Calapan Tsunami Exposure MapДокумент1 страницаCalapan Tsunami Exposure MapJosef elvin CamposОценок пока нет
- On The Figure of The Earth From ISOTASY Measurements in The United StatesДокумент180 страницOn The Figure of The Earth From ISOTASY Measurements in The United Statesindio007Оценок пока нет
- Lec 1Документ45 страницLec 1JannoОценок пока нет
- Topographic Map of de BerryДокумент1 страницаTopographic Map of de BerryHistoricalMapsОценок пока нет
- GMK 7 Distances On Earth SurfacesДокумент6 страницGMK 7 Distances On Earth Surfacessaurabh kalbande100% (1)
- Evaluation of Performance of GPS Receiver in CRRIДокумент8 страницEvaluation of Performance of GPS Receiver in CRRIMuani HmarОценок пока нет
- Compsys21 PDFДокумент27 страницCompsys21 PDFHernan RomeroОценок пока нет
- Flooding Chermside Flood Flag MapДокумент1 страницаFlooding Chermside Flood Flag MapNgaire TaylorОценок пока нет
- Ce1 Compilation of LessonsДокумент107 страницCe1 Compilation of LessonsFides CastelltortОценок пока нет
- Coordinates System AND OFFSHORE ACTIVITIESДокумент22 страницыCoordinates System AND OFFSHORE ACTIVITIESTimothy AdzatiОценок пока нет
- LN 4 Globe - Latitudes and Longitudes CWДокумент2 страницыLN 4 Globe - Latitudes and Longitudes CWDE DTC NGM n FBRОценок пока нет
- An Acad Bras Sci 2021 GattassДокумент17 страницAn Acad Bras Sci 2021 GattasstecnicoengenОценок пока нет
- 4890 1 13116 1 10 20160107Документ20 страниц4890 1 13116 1 10 20160107Ana Kathrin TolentinoОценок пока нет
- Tidal Predictions For Georgetown GuyanaДокумент7 страницTidal Predictions For Georgetown GuyanahutsonianpОценок пока нет
- Topographic Map of Camp Creek LakeДокумент1 страницаTopographic Map of Camp Creek LakeHistoricalMapsОценок пока нет
- CoordcvtДокумент6 страницCoordcvtsurvey17grОценок пока нет
- Quectel L80 GPS Protocol Specification V1.2Документ44 страницыQuectel L80 GPS Protocol Specification V1.2Pok ChiuОценок пока нет
- Tachimetri dan Kontur Survei MetodeДокумент48 страницTachimetri dan Kontur Survei MetodeArif RamadhanОценок пока нет
- San SalvadorДокумент1 страницаSan SalvadorMartonОценок пока нет