Вам также может понравиться
- Les Capteurs Keyes Arduino UnoДокумент48 страницLes Capteurs Keyes Arduino Unoben boubakerОценок пока нет
- Circuits Logiques ProgrammablesДокумент23 страницыCircuits Logiques Programmablesben boubaker100% (1)
- Exo Cna Can1Документ3 страницыExo Cna Can1ben boubaker100% (2)
- CnacanДокумент22 страницыCnacanAbou RihОценок пока нет
- LaplaceДокумент10 страницLaplaceben boubaker100% (1)
- ElectroniquenumeriqueДокумент76 страницElectroniquenumeriqueben boubakerОценок пока нет
- LaplaceДокумент10 страницLaplaceben boubaker100% (1)
- Communication Avec MatlabДокумент9 страницCommunication Avec Matlabben boubakerОценок пока нет
- Lecture CapaciteДокумент4 страницыLecture Capaciteben boubaker0% (1)
- CnacanДокумент11 страницCnacanben boubakerОценок пока нет
- Travaux Pratiques enДокумент37 страницTravaux Pratiques enben boubakerОценок пока нет
- TP Electronique Numerique V 5.0Документ7 страницTP Electronique Numerique V 5.0محمد أمين سعايديةОценок пока нет
- Guide ISISДокумент22 страницыGuide ISISben boubaker100% (1)
- COURS Electronique de PuissanceДокумент139 страницCOURS Electronique de Puissancemechergui_nabil92% (74)
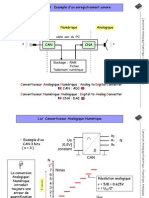
- Mini Projet (Convertisseur Analogique-Numérique)Документ6 страницMini Projet (Convertisseur Analogique-Numérique)ben boubaker100% (1)
- Convertisseur Numérique-AnalogiqueДокумент5 страницConvertisseur Numérique-Analogiqueben boubakerОценок пока нет
- Les RedresseursДокумент14 страницLes Redresseursben boubakerОценок пока нет
- Commande Des MachinesДокумент106 страницCommande Des Machinesben boubaker93% (15)
- Variation de Vitesse Des Moteurs Courant ContinuДокумент18 страницVariation de Vitesse Des Moteurs Courant Continuben boubaker100% (1)
- Chapit 1Документ27 страницChapit 1ben boubakerОценок пока нет
- Le TriphaseДокумент4 страницыLe Triphaseben boubakerОценок пока нет
- TP Regulation 2010Документ6 страницTP Regulation 2010ben boubaker100% (2)
- Guide AresДокумент16 страницGuide Aresben boubakerОценок пока нет
- Matlab TPДокумент7 страницMatlab TPben boubaker100% (1)
- Cours Matlab Iset KebilliДокумент28 страницCours Matlab Iset Kebilliben boubaker100% (2)
- Cours Matlab Iset KebilliДокумент28 страницCours Matlab Iset Kebilliben boubaker100% (2)
- Conclusion PfeДокумент3 страницыConclusion PfeDæ MírОценок пока нет
- Chap. 05 Mouvement Et InteractionsДокумент3 страницыChap. 05 Mouvement Et InteractionsManuel DiazОценок пока нет
- Simulation ConsommationДокумент101 страницаSimulation ConsommationmouffakbmОценок пока нет
- Cours Vitesse Roues VoitureДокумент2 страницыCours Vitesse Roues VoiturezidisamirОценок пока нет
- 21 PSIEMrepДокумент2 страницы21 PSIEMrepEl kamar-channelОценок пока нет
- Rapport FINALДокумент46 страницRapport FINALAbderrahman HMAITIОценок пока нет
- TransformateurДокумент5 страницTransformateuryeddajibiОценок пока нет
- Le Courant Électrique: Benlazreg Aya Fatima Zahra 3 Ème GEДокумент15 страницLe Courant Électrique: Benlazreg Aya Fatima Zahra 3 Ème GEzahra benlazregОценок пока нет
- B - Transparent Cours Bruits 2013Документ92 страницыB - Transparent Cours Bruits 2013chemaliОценок пока нет
- Adhérence - CoursДокумент1 страницаAdhérence - Coursi kОценок пока нет
- Hache UrsДокумент6 страницHache UrsLachari AchrafОценок пока нет
- 21METHODES DE MESURE DES DEBITS FatДокумент11 страниц21METHODES DE MESURE DES DEBITS Fatmarouf khaledОценок пока нет
- Nexans 10044007Документ2 страницыNexans 10044007ousseynouОценок пока нет
- Cours 2Документ2 страницыCours 2Kamel LafalaОценок пока нет
- Physique PREPA T 2022Документ4 страницыPhysique PREPA T 2022ZeidaneОценок пока нет
- Cours Electronique MAJДокумент40 страницCours Electronique MAJSaid EL Aissaouy100% (1)
- Brochure Clim Hitachi Gamme Mural MOKAIДокумент5 страницBrochure Clim Hitachi Gamme Mural MOKAIHeponacОценок пока нет
- 1eres C Et D EVAL 2Документ4 страницы1eres C Et D EVAL 2Masna mamert100% (1)
- La Physique Des Particules ElДокумент24 страницыLa Physique Des Particules Elmcb0431703Оценок пока нет
- Chapitre I - Optique Géométrique Et OndulatoireДокумент150 страницChapitre I - Optique Géométrique Et OndulatoireGhost100Оценок пока нет
- L'energie 2023Документ9 страницL'energie 2023YASSERV3 YasserОценок пока нет
- DCorrigé FinalДокумент4 страницыDCorrigé FinalAbdelfatteh BoukattayaОценок пока нет
- Cours Systemes Hydrauliques Et PneumatiquesДокумент83 страницыCours Systemes Hydrauliques Et PneumatiquesWill Smith TaherОценок пока нет
- TP2 Redressement l2 AutoДокумент4 страницыTP2 Redressement l2 AutotaihihananeamaniОценок пока нет
- Exercices Trigo1Документ3 страницыExercices Trigo1Med MattaОценок пока нет
- E1320144B1 - Rapport D'essaisДокумент38 страницE1320144B1 - Rapport D'essaisMourad BenderradjiОценок пока нет
- Extrait 42249210 PDFДокумент147 страницExtrait 42249210 PDFKadriAbderRaoufОценок пока нет
- tp20 Frottements SolidesДокумент2 страницыtp20 Frottements SolidesLAALAIFAICELОценок пока нет
- P4 3 Dipole MagnetiqueДокумент9 страницP4 3 Dipole MagnetiquesevemasseОценок пока нет
- TP Phys ts1 PDFДокумент131 страницаTP Phys ts1 PDFAla Kammoun100% (1)