Вам также может понравиться
- Chapter 7Документ70 страницChapter 7Sujin PrajapatiОценок пока нет
- The Transportation Lag: X (T) X (T-X (S) X(S)Документ9 страницThe Transportation Lag: X (T) X (T-X (S) X(S)ashish guptaОценок пока нет
- Assignment - 10: Shyam Shankar H R EE15B127 November 9, 2017Документ15 страницAssignment - 10: Shyam Shankar H R EE15B127 November 9, 2017Shyam ShankarОценок пока нет
- Implementation of Level Set Method Based On OpenFOAM For Capturing The Free Interface in in Compressible Fluid FlowsДокумент10 страницImplementation of Level Set Method Based On OpenFOAM For Capturing The Free Interface in in Compressible Fluid FlowsAghajaniОценок пока нет
- Lag Comp Ensator Design Using Root: Ob JectivesДокумент8 страницLag Comp Ensator Design Using Root: Ob JectivesProf HaryОценок пока нет
- Compensators: G (S) G (S)Документ10 страницCompensators: G (S) G (S)Arshiya TabassumОценок пока нет
- Lag Compensator Design Using Root Locus Technique: ObjectivesДокумент7 страницLag Compensator Design Using Root Locus Technique: ObjectivesMuhammad AdeelОценок пока нет
- Module 5: Design of Sampled Data Control Systems: Lecture Note 7Документ7 страницModule 5: Design of Sampled Data Control Systems: Lecture Note 7jhonОценок пока нет
- Bode Plot Design PDFДокумент15 страницBode Plot Design PDFsmileuplease8498Оценок пока нет
- 1 - Compensator Design Procedure - Lead - Lag - With ExamplesДокумент12 страниц1 - Compensator Design Procedure - Lead - Lag - With ExamplesMadhav SОценок пока нет
- Tutorial III Root Locus DesignДокумент25 страницTutorial III Root Locus Designapi-3856083100% (3)
- Lead CompensatorДокумент6 страницLead CompensatorsОценок пока нет
- Ginzburg-Landau EquationsДокумент9 страницGinzburg-Landau EquationsJuan Carlos Morales ParraОценок пока нет
- Solution To HW8Документ13 страницSolution To HW8TriinyRosseОценок пока нет
- Design FrequencyДокумент5 страницDesign FrequencyGustavo SánchezОценок пока нет
- Ltfatnote 021Документ4 страницыLtfatnote 021Cosmin StanОценок пока нет
- Homework 7 - SolutionsДокумент13 страницHomework 7 - SolutionsMuhamad ArifОценок пока нет
- 1 Point: Ref GДокумент3 страницы1 Point: Ref GSrinivasarao KavurUОценок пока нет
- E24Документ8 страницE24ROHITCHOURASIYAОценок пока нет
- Progress in Electromagnetics Research, PIER 43, 287-304, 2003Документ18 страницProgress in Electromagnetics Research, PIER 43, 287-304, 2003puja.sarkarОценок пока нет
- Exercise DGCL MeshDeformationДокумент12 страницExercise DGCL MeshDeformationtijsnoyonОценок пока нет
- Multi Scalar Multiplication For Recursive SNARKs and MoreДокумент16 страницMulti Scalar Multiplication For Recursive SNARKs and Moreeth everОценок пока нет
- Convex OptimizationДокумент152 страницыConvex OptimizationnudalaОценок пока нет
- EEC 4043 LECT011 Compensator Design I - Lead and LagДокумент39 страницEEC 4043 LECT011 Compensator Design I - Lead and Lagjaltiti0% (1)
- HW 5 SolДокумент10 страницHW 5 SolPedroОценок пока нет
- Me 471 Phase Lag DesignДокумент2 страницыMe 471 Phase Lag Designhend018Оценок пока нет
- Assignment AcsdДокумент8 страницAssignment AcsdChinnu VineethaОценок пока нет
- BV Cvxbook Extra Exercises PDFДокумент152 страницыBV Cvxbook Extra Exercises PDFSoumitra BhowmickОценок пока нет
- Additional Exercises For Convex Optimization PDFДокумент187 страницAdditional Exercises For Convex Optimization PDFCliffordTorresОценок пока нет
- ch5 PDFДокумент74 страницыch5 PDFAmit MeenaОценок пока нет
- Stic Analysis of The FRДокумент39 страницStic Analysis of The FRfarid OLОценок пока нет
- MIT16 30F10 Lec04Документ16 страницMIT16 30F10 Lec04Cristian NapoleОценок пока нет
- BÀI TẬP GT LỒIДокумент127 страницBÀI TẬP GT LỒIkhongtinОценок пока нет
- Local Existence and Blow-Up Criterion of 3D Ideal Magnetohydrodynamics EquationsДокумент8 страницLocal Existence and Blow-Up Criterion of 3D Ideal Magnetohydrodynamics EquationsNo FaceОценок пока нет
- AP SolnДокумент4 страницыAP SolnSajad VmОценок пока нет
- Phase Lead Compensator Design Using Bode Plots: ObjectivesДокумент7 страницPhase Lead Compensator Design Using Bode Plots: ObjectivesMuhammad AdeelОценок пока нет
- FDTD Analysis of Dipole Antenna As Emi Sensor: Progress in Electromagnetics Research, PIER 69, 341-359, 2007Документ19 страницFDTD Analysis of Dipole Antenna As Emi Sensor: Progress in Electromagnetics Research, PIER 69, 341-359, 2007bal krishna dubeyОценок пока нет
- Cuckler-Kahn2009 Article EntropyBoundsForPerfectMatchinДокумент9 страницCuckler-Kahn2009 Article EntropyBoundsForPerfectMatchinjohnoftheroadОценок пока нет
- Mohammed Hafiz Bin Abdul Aziz U090018W Group 3F1 Formal ReportДокумент8 страницMohammed Hafiz Bin Abdul Aziz U090018W Group 3F1 Formal Reportta_daa_89Оценок пока нет
- Design of Phase-Lead CompensatorДокумент13 страницDesign of Phase-Lead CompensatorAsif MudgalОценок пока нет
- RF Design Lecture NotesДокумент79 страницRF Design Lecture NotesrachnaОценок пока нет
- BV Cvxbook Extra ExercisesДокумент117 страницBV Cvxbook Extra ExercisesAsif AhmedОценок пока нет
- The Use of Curved Elements in The Finite Element A PDFДокумент13 страницThe Use of Curved Elements in The Finite Element A PDFMd kowsОценок пока нет
- Chapter 7 - Bode Plot and Gain Compensation (Part 2)Документ18 страницChapter 7 - Bode Plot and Gain Compensation (Part 2)Thanes WaranОценок пока нет
- Implementing FDTD TutorialДокумент10 страницImplementing FDTD TutorialrmehfuzОценок пока нет
- Covariances of ARMA ProcessesДокумент9 страницCovariances of ARMA ProcessesRyan TeehanОценок пока нет
- 4442 Exam 2008Документ7 страниц4442 Exam 2008Roy VeseyОценок пока нет
- G K S S: Che381 Process Dynamics & Control Jan-Apr 2014 End-Semester Exam 3 Hours 100 PointsДокумент4 страницыG K S S: Che381 Process Dynamics & Control Jan-Apr 2014 End-Semester Exam 3 Hours 100 PointsSushmitaОценок пока нет
- SD Lab ReportДокумент10 страницSD Lab ReportYuvraj TyagiОценок пока нет
- Convolution Quadrature and Discretized Operational Calculus. IДокумент17 страницConvolution Quadrature and Discretized Operational Calculus. Irezza ruzuqiОценок пока нет
- The Transportation Lag: X (T) X (T-X (S) X(S)Документ9 страницThe Transportation Lag: X (T) X (T-X (S) X(S)nm2007kОценок пока нет
- Extra Exercises PDFДокумент232 страницыExtra Exercises PDFShy PeachDОценок пока нет
- A Tutorial For Electronic Circuit ...Документ5 страницA Tutorial For Electronic Circuit ...Chito June TumolvaОценок пока нет
- Design via frequency response Transient response via gain adjustment Consider a unity feedback system, where G(s) = - The closed loop transfer function is T (s) = ω s + 2ζωs + ωДокумент12 страницDesign via frequency response Transient response via gain adjustment Consider a unity feedback system, where G(s) = - The closed loop transfer function is T (s) = ω s + 2ζωs + ωmdthОценок пока нет
- Gate Control QuestionsДокумент4 страницыGate Control QuestionsAtanuMajiОценок пока нет
- Script 1011 WaveДокумент10 страницScript 1011 Wavetanvir04104Оценок пока нет
- Cutoff XFEM PaperДокумент19 страницCutoff XFEM PaperFelipe LopesОценок пока нет
- Lecture38 PDFДокумент5 страницLecture38 PDFNiyas PОценок пока нет
- IEEE - 219 1975 - Recommended Practice For Loudspeaker Measurements PDFДокумент21 страницаIEEE - 219 1975 - Recommended Practice For Loudspeaker Measurements PDFGreg TsaiОценок пока нет
- BF254 BF255Документ3 страницыBF254 BF255rrr2013Оценок пока нет
- Electrical Systems Simulation LAB MANUAL 2019-2020Документ25 страницElectrical Systems Simulation LAB MANUAL 2019-2020Vinay Kumar50% (2)
- DJ ABERTO SIEMENS 3 WT Catalogo-Lv35-3wtДокумент78 страницDJ ABERTO SIEMENS 3 WT Catalogo-Lv35-3wtMyllerОценок пока нет
- Valleylab ForceTriad - User Manual PDFДокумент100 страницValleylab ForceTriad - User Manual PDFPaulina LekszyckaОценок пока нет
- Micom P120, P121, P122 and P123 A Whole Range For A Global AnswerДокумент10 страницMicom P120, P121, P122 and P123 A Whole Range For A Global AnswerNguyễn QuýОценок пока нет
- Responsibility Matrix - V00Документ7 страницResponsibility Matrix - V00Huseyin Sengul100% (1)
- Prepar3D View GroupsДокумент22 страницыPrepar3D View GroupsTrevorHaleОценок пока нет
- Multiplexers and DemultiplexersДокумент10 страницMultiplexers and Demultiplexersamury kgОценок пока нет
- Multi-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electrical DowntiltДокумент2 страницыMulti-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electrical DowntiltFachri MОценок пока нет
- Walkthrought Brigandine GEДокумент14 страницWalkthrought Brigandine GEPF05Оценок пока нет
- Thermistor 20KДокумент2 страницыThermistor 20KBreinhard Septian Siahaan100% (1)
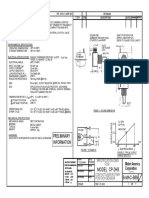
- Preliminary Information: B-MAC-B69 Model Cp-2HbДокумент1 страницаPreliminary Information: B-MAC-B69 Model Cp-2HbCykhong KhongОценок пока нет
- 2015 An Energy-Efficient Design For ECG Recording and R Peak Detection Based On Wavelet TransformДокумент5 страниц2015 An Energy-Efficient Design For ECG Recording and R Peak Detection Based On Wavelet TransformRajesh AgarwalОценок пока нет
- Vodafone Dispersed Radio Guidelines For Direct Supply and PowershiftДокумент13 страницVodafone Dispersed Radio Guidelines For Direct Supply and PowershiftMarcelОценок пока нет
- Question BankДокумент3 страницыQuestion BankTARUN PRASADОценок пока нет
- PAG 09.1 - Investigating Charging and Discharging of CapacitorsДокумент4 страницыPAG 09.1 - Investigating Charging and Discharging of CapacitorsjmsonlОценок пока нет
- 2012-12-13 The County TimesДокумент40 страниц2012-12-13 The County TimesSouthern Maryland OnlineОценок пока нет
- Jaunt VR Field GuideДокумент68 страницJaunt VR Field GuideRobertoJmzОценок пока нет
- SS16 CPGK DC60Документ4 страницыSS16 CPGK DC60Benjie CallantaОценок пока нет
- BLRBACДокумент78 страницBLRBACJabulani2010100% (1)
- EC105Документ18 страницEC105api-3853441Оценок пока нет
- Solis 30K User ManualДокумент24 страницыSolis 30K User ManualHRОценок пока нет
- Casil LCDProduct CatalogДокумент8 страницCasil LCDProduct Catalogjalali007Оценок пока нет
- Woodward L Series Application NoteДокумент17 страницWoodward L Series Application NoteDave WallaceОценок пока нет
- Msi k7d Manual EngДокумент112 страницMsi k7d Manual EngElmir MutapcicОценок пока нет
- Woodward 2301A 9905 9907 Series Technical ManualДокумент52 страницыWoodward 2301A 9905 9907 Series Technical Manualtimipl2100% (5)
- Control SystemДокумент215 страницControl SystemRyan Tuyan100% (1)
- Electronic Devices and Circuit An Introduction by Allen Mottershead 1356Документ1 страницаElectronic Devices and Circuit An Introduction by Allen Mottershead 1356DHAMODHARAN0% (7)
- GPV Fuses: Overcurrent and Overvoltage ProtectionДокумент32 страницыGPV Fuses: Overcurrent and Overvoltage Protectionskavens1801Оценок пока нет
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)От EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Оценок пока нет
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsОт EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeОт EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeРейтинг: 4 из 5 звезд4/5 (2)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.От EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Рейтинг: 5 из 5 звезд5/5 (1)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryОт EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryОценок пока нет
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormОт EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormРейтинг: 5 из 5 звезд5/5 (5)
- Limitless Mind: Learn, Lead, and Live Without BarriersОт EverandLimitless Mind: Learn, Lead, and Live Without BarriersРейтинг: 4 из 5 звезд4/5 (6)
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeОт EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticeРейтинг: 5 из 5 звезд5/5 (1)
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)От EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Оценок пока нет
- Mental Math Secrets - How To Be a Human CalculatorОт EverandMental Math Secrets - How To Be a Human CalculatorРейтинг: 5 из 5 звезд5/5 (3)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldОт EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldРейтинг: 3 из 5 звезд3/5 (80)