Вам также может понравиться
- Stepper Motor Positioning Control by IR RemoteДокумент80 страницStepper Motor Positioning Control by IR RemotesathishОценок пока нет
- Automatic Access Control System Using Student Identification Card Based On Rfid TechnologyДокумент100 страницAutomatic Access Control System Using Student Identification Card Based On Rfid TechnologythgnguyenОценок пока нет
- (FALL 2007) : Bs Electronics Engineering Final Year Project ProposalДокумент9 страниц(FALL 2007) : Bs Electronics Engineering Final Year Project Proposalarif_khan07100% (1)
- Zigbee Based Remote Controlled Robot With Wireless VideoДокумент15 страницZigbee Based Remote Controlled Robot With Wireless VideoDixith VooraОценок пока нет
- Advanced Railway Security System (Arss) Based On Zigbee Communication For Track Fault DetectionДокумент23 страницыAdvanced Railway Security System (Arss) Based On Zigbee Communication For Track Fault DetectionRashmi100% (2)
- Iot Based Weather Station Using GSMДокумент5 страницIot Based Weather Station Using GSMPooja Ban100% (1)
- Design and Development of Vehicle Anti-Collision System Using Electromagnet and Ultrasonic SensorsДокумент4 страницыDesign and Development of Vehicle Anti-Collision System Using Electromagnet and Ultrasonic SensorsMahboob IqbalОценок пока нет
- Design of Agv With Mobile Communication: ArticleДокумент6 страницDesign of Agv With Mobile Communication: ArticleHo Van RoiОценок пока нет
- Submitted To: Submitted byДокумент13 страницSubmitted To: Submitted byajayОценок пока нет
- PC Controlled Military Robot Using ZigbeeДокумент134 страницыPC Controlled Military Robot Using ZigbeeSreenivasulu ReddyОценок пока нет
- Technical Specifications:: Hyderabad VijayawadaДокумент5 страницTechnical Specifications:: Hyderabad VijayawadamsuryamanojОценок пока нет
- Project Introductive Seminar OnДокумент26 страницProject Introductive Seminar OnDarshanОценок пока нет
- GSM Security SystemДокумент5 страницGSM Security SystemPreru PreranaОценок пока нет
- GSM Security SystemДокумент5 страницGSM Security SystemVivek Chandra YadavОценок пока нет
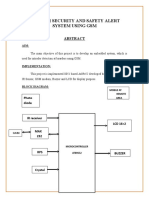
- Boarder Security and Safety Alert System Using GSM: Photo DiodeДокумент3 страницыBoarder Security and Safety Alert System Using GSM: Photo DiodenkpatilОценок пока нет
- "Speed Control and Protection of Induction Motor Using Internet of ThingДокумент34 страницы"Speed Control and Protection of Induction Motor Using Internet of ThingDarshan0% (1)
- Index: A. About KielДокумент73 страницыIndex: A. About KieldileeppatraОценок пока нет
- Mpi Final Report V FinalДокумент16 страницMpi Final Report V FinalAsim AslamОценок пока нет
- VSrimukhi BJPremPrasannaKumar DVSPrasad 49Документ4 страницыVSrimukhi BJPremPrasannaKumar DVSPrasad 49Abhay BhujОценок пока нет
- Field Monitoring and Automation Using Iot in AgricultureДокумент114 страницField Monitoring and Automation Using Iot in AgriculturedileeppatraОценок пока нет
- Brown Final PPT FinalДокумент36 страницBrown Final PPT FinalDarshan100% (2)
- Alive Human Detector: Project By, Nayana.K.R Sheefa Shah K.Shifa Sulthana Swetha.N.Murthy Guided By, Yatish.N.SДокумент35 страницAlive Human Detector: Project By, Nayana.K.R Sheefa Shah K.Shifa Sulthana Swetha.N.Murthy Guided By, Yatish.N.SSushma NageshОценок пока нет
- GSM Based System Design For Industrial AutomationДокумент8 страницGSM Based System Design For Industrial AutomationAnurag DalviОценок пока нет
- Supraja DocumentДокумент73 страницыSupraja DocumentAnonymous gWVMMa588pОценок пока нет
- MAINДокумент21 страницаMAINVijaykumar SangisettiОценок пока нет
- Micro MouseДокумент17 страницMicro MouseFarshad yazdiОценок пока нет
- Intelligent Breaking SystemДокумент21 страницаIntelligent Breaking SystemMurugan MОценок пока нет
- DC Motor Speed Control by AndroidДокумент8 страницDC Motor Speed Control by AndroidNikhil GaikwadОценок пока нет
- Corporate Security SystemДокумент8 страницCorporate Security SystemAshit RathoreОценок пока нет
- Power Saver of Street LightДокумент5 страницPower Saver of Street LightLaxmikant Chandra0% (1)
- FinalДокумент33 страницыFinalnaveenaОценок пока нет
- Advanced Smart Card Based Digital Energy Meter Using Atmel MicrocontrollerДокумент99 страницAdvanced Smart Card Based Digital Energy Meter Using Atmel MicrocontrollervinayakaОценок пока нет
- 25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentДокумент84 страницы25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentdileeppatraОценок пока нет
- Mini Project ReportДокумент27 страницMini Project Reportakhilmadhu2010Оценок пока нет
- Design and Modeling of Arm Processor Microcontroller: December 2020Документ12 страницDesign and Modeling of Arm Processor Microcontroller: December 2020Abdulkadier AbdelaОценок пока нет
- The Greatest Threat To National Security Is "Terrorism", Infiltrating Through BordersДокумент12 страницThe Greatest Threat To National Security Is "Terrorism", Infiltrating Through BordersJagadeesh AОценок пока нет
- PC Controlled RobotДокумент51 страницаPC Controlled RobotmahammadvasimkОценок пока нет
- Remote Notice Board Using GSM With SmsДокумент14 страницRemote Notice Board Using GSM With SmsMikroc Thupati SrinivsОценок пока нет
- Research Proposal (Plaza)Документ10 страницResearch Proposal (Plaza)Edmarjan ConcepcionОценок пока нет
- E-Notice Board Using GSM and Microcontroller: Project Presentation OnДокумент25 страницE-Notice Board Using GSM and Microcontroller: Project Presentation OnBandesh KumarОценок пока нет
- Rfid Access Control System and Security WebcamДокумент6 страницRfid Access Control System and Security WebcamAjay BhaleraoОценок пока нет
- Obstacle Avoider As Well As DTMF Based Robot: Microcontroller AT89S52Документ3 страницыObstacle Avoider As Well As DTMF Based Robot: Microcontroller AT89S52lucky jОценок пока нет
- Automatic Train Collision and Accident Avoidance SystemДокумент22 страницыAutomatic Train Collision and Accident Avoidance SystemAbdul RazzakОценок пока нет
- Bluetooth Based Data LoggerДокумент7 страницBluetooth Based Data LoggerMeghna PatelОценок пока нет
- Speed Control System With Rfid Equipped VehicleДокумент27 страницSpeed Control System With Rfid Equipped VehicleAnonymous L9fB0XUОценок пока нет
- IJRTI1612011Документ2 страницыIJRTI1612011joel mshanaОценок пока нет
- Main PPT Speed Control System With Rfid Equipped VehicleДокумент27 страницMain PPT Speed Control System With Rfid Equipped VehicleSujatha GoliОценок пока нет
- International Journal of Computational Engineering Research (IJCER)Документ4 страницыInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Оценок пока нет
- TachometerДокумент51 страницаTachometerKiran SugandhiОценок пока нет
- Design of 6 Dof Robotic Arm Controlled Over The Internet: G. Rajiv and SivakumarДокумент5 страницDesign of 6 Dof Robotic Arm Controlled Over The Internet: G. Rajiv and SivakumarSarmad GulzarОценок пока нет
- SPEED CHECKER FOR HI-WAsYSДокумент26 страницSPEED CHECKER FOR HI-WAsYSAbhinav KumaarОценок пока нет
- Obstacleavoidingrobotreportrobot23 090914221509 Phpapp01Документ33 страницыObstacleavoidingrobotreportrobot23 090914221509 Phpapp01Debojit DasОценок пока нет
- 106 Zig-Bee Based Pick & Place RobotДокумент3 страницы106 Zig-Bee Based Pick & Place Robotprabha upalaОценок пока нет
- Movement of Robot Using BluetoothДокумент12 страницMovement of Robot Using BluetoothShubhamОценок пока нет
- Density Based Traffic Control SYSTEM..... : RishiДокумент23 страницыDensity Based Traffic Control SYSTEM..... : RishiStenil AntonyОценок пока нет
- Global Alert and Control System For Ups BatteryДокумент22 страницыGlobal Alert and Control System For Ups BatterySai NithishОценок пока нет
- Practical Embedded Controllers: Design and Troubleshooting with the Motorola 68HC11От EverandPractical Embedded Controllers: Design and Troubleshooting with the Motorola 68HC11Оценок пока нет
- Sorting The Numbers in Ascending Order AIM: EXP - NO: 1 DATE: 10.09.09Документ75 страницSorting The Numbers in Ascending Order AIM: EXP - NO: 1 DATE: 10.09.09manishas121Оценок пока нет
- Alexan 8051 TM-1 User's ManualДокумент17 страницAlexan 8051 TM-1 User's Manualdats_jed317Оценок пока нет
- OpenWrt Project - TP-Link TL-WA901NDДокумент8 страницOpenWrt Project - TP-Link TL-WA901NDJoao WerleyОценок пока нет
- ADAM24Pxx ETCДокумент37 страницADAM24Pxx ETCLaur IriОценок пока нет
- Attiny1624/1626/1627: Tinyavr 2 FamilyДокумент522 страницыAttiny1624/1626/1627: Tinyavr 2 FamilyLeonОценок пока нет
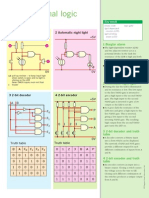
- Digital Logic DesignsДокумент1 страницаDigital Logic DesignsKevin Haworth100% (3)
- ROM ReffДокумент11 страницROM ReffAmy ReedОценок пока нет
- Week 1: Assignment: Customization Cost That Is To Be Separately Borne by Every Customer."Документ3 страницыWeek 1: Assignment: Customization Cost That Is To Be Separately Borne by Every Customer."vidhya dsОценок пока нет
- Overview of Computer Architecture and Organization: Deepti LawandДокумент50 страницOverview of Computer Architecture and Organization: Deepti LawandSumit GuptaОценок пока нет
- ARM A9 Intro AltДокумент28 страницARM A9 Intro AltcointoinОценок пока нет
- Chapter 1Документ46 страницChapter 1Temesgen MekonenОценок пока нет
- GCSE OCR 1.1 Common CPU Components and Their FunctionДокумент7 страницGCSE OCR 1.1 Common CPU Components and Their FunctionMichael O’LearyОценок пока нет
- 8085 Instruction Addressing Modes ImppДокумент87 страниц8085 Instruction Addressing Modes ImppRohan VaidyaОценок пока нет
- NASM: Data and Bss Examples and Sample Problems: Machine-Level and Systems ProgrammingДокумент41 страницаNASM: Data and Bss Examples and Sample Problems: Machine-Level and Systems Programmingemnet81Оценок пока нет
- Batch Weighing MachineДокумент21 страницаBatch Weighing MachinePriyansh MehtaОценок пока нет
- Module 5 DSDV Notes NewДокумент23 страницыModule 5 DSDV Notes Newhrushithar27Оценок пока нет
- C For The Microprocessor EngineerДокумент433 страницыC For The Microprocessor EngineerCCJ001100% (1)
- PIC18 (L) F2XK22/4XK22: Flash Memory Programming SpecificationДокумент42 страницыPIC18 (L) F2XK22/4XK22: Flash Memory Programming SpecificationSimona AlexandraОценок пока нет
- Microfriend: Dyna - 85 User's ManualДокумент96 страницMicrofriend: Dyna - 85 User's ManualNeelam KapoorОценок пока нет
- Integrated Digital Audio Interface Receiver and Transmitter: FeaturesДокумент63 страницыIntegrated Digital Audio Interface Receiver and Transmitter: FeaturesCarlos Eduardo Caparroz DuarteОценок пока нет
- Learning-Guide-Elex 75 Ay 2022-2023Документ5 страницLearning-Guide-Elex 75 Ay 2022-2023Welma SambajonОценок пока нет
- Project - First Review: Presented byДокумент16 страницProject - First Review: Presented byAnvesh SilaganaОценок пока нет
- 7 Counters PDFДокумент13 страниц7 Counters PDFsaraswatthiОценок пока нет
- Objec Ves: 2 Computer Hardware Repairs and MaintenanceДокумент67 страницObjec Ves: 2 Computer Hardware Repairs and MaintenanceNitin MultaniОценок пока нет
- CPU-Z HTML Report FileДокумент28 страницCPU-Z HTML Report FilephanipriyankОценок пока нет
- 88f5182-Based Storage Networking Platforms Open Source Community Programmer's User GuideДокумент389 страниц88f5182-Based Storage Networking Platforms Open Source Community Programmer's User Guidepablo_marxОценок пока нет
- Microcontrollers: KNX AssociationДокумент14 страницMicrocontrollers: KNX AssociationxendikaОценок пока нет
- Chapter 6 - Synthesis of VHDL CodeДокумент97 страницChapter 6 - Synthesis of VHDL CodeVăn Nguyễn CôngОценок пока нет
- Digital Logic DesignДокумент19 страницDigital Logic DesignarunpandiyanОценок пока нет