Вам также может понравиться
- Mapa MentalДокумент1 страницаMapa Mentalsistemaelectrico0% (1)
- Diseño de LevasДокумент22 страницыDiseño de LevasNacho GarroneОценок пока нет
- 05 Analisis de Circuitos HidraulicosДокумент27 страниц05 Analisis de Circuitos HidraulicosElvis Anconeira Checa0% (1)
- Sistemas HiperestáticosДокумент13 страницSistemas HiperestáticosDiana ElizabethОценок пока нет
- Levas - IntroducciónДокумент34 страницыLevas - IntroducciónJorge Lopez RamosОценок пока нет
- Engranes Helicoidales CruzadosДокумент2 страницыEngranes Helicoidales CruzadosAlan Mg0% (1)
- Trabajo Mecanismo LimadoraДокумент9 страницTrabajo Mecanismo LimadoraMarlon Jahir OsorioОценок пока нет
- Tornillos de PotenciaДокумент16 страницTornillos de PotenciaKitman Achahui Martinez100% (1)
- Inversion CinematicaДокумент5 страницInversion CinematicaCortazar CesarОценок пока нет
- Taller 1 de MecanismosДокумент2 страницыTaller 1 de MecanismostanainaОценок пока нет
- Ejerciciario de LevasДокумент2 страницыEjerciciario de LevasCuauhtemoc Mazon ValadezОценок пока нет
- Actuadores InvestigacionДокумент26 страницActuadores InvestigacionSol GómezОценок пока нет
- Unidad 3 Diseño de Engranes RectosДокумент15 страницUnidad 3 Diseño de Engranes RectosUrielDorantesОценок пока нет
- MAZAROTASДокумент5 страницMAZAROTASJ.B. SierraОценок пока нет
- 6.3 Energia de Transferenciadocx-1Документ7 страниц6.3 Energia de Transferenciadocx-1Enrique ZepactleОценок пока нет
- Levas y Seguidores Cuadro SinópticoДокумент2 страницыLevas y Seguidores Cuadro SinópticoDaniel Garcia0% (1)
- Mecanismos de Eslabones ArticuladosДокумент25 страницMecanismos de Eslabones ArticuladosMaxi I. Céspedes GonzalesОценок пока нет
- Dinamica de MaquinariaДокумент173 страницыDinamica de MaquinariaRoberto Gener MoralesОценок пока нет
- Simulacion Del Engrane PDFДокумент354 страницыSimulacion Del Engrane PDFAlan Leget100% (1)
- Teoría de Corte Velocidades y Herramientas MaquinadoДокумент5 страницTeoría de Corte Velocidades y Herramientas MaquinadoCesar Caballero OliveraОценок пока нет
- EslabonesДокумент15 страницEslabonesAngel LLamasОценок пока нет
- Introduccion Generacion de EnergíaДокумент57 страницIntroduccion Generacion de EnergíaJesús Huanco Anco100% (1)
- Levas y EngranesДокумент20 страницLevas y EngranesAndrea SortoОценок пока нет
- Trenes de Engranes Epiciclicos o PlanetariosДокумент9 страницTrenes de Engranes Epiciclicos o PlanetariosWilliamChuquiguangaОценок пока нет
- T1 - Conceptos Básicos Sobre Mecanismos y MáquinasДокумент19 страницT1 - Conceptos Básicos Sobre Mecanismos y MáquinasfronjoseОценок пока нет
- Centros InstantaneosДокумент7 страницCentros InstantaneosMoises FuentesОценок пока нет
- Unidad No. 1 Componentes de Un Sistema Neumatico e Hid.Документ21 страницаUnidad No. 1 Componentes de Un Sistema Neumatico e Hid.gonzalezlazaro5100% (1)
- Balance de Exergia en Volumenes de ControlДокумент10 страницBalance de Exergia en Volumenes de ControlVazquez Perez IvanОценок пока нет
- Maquinas y Mecanismos!Документ21 страницаMaquinas y Mecanismos!mariaОценок пока нет
- Bomba de Paletas DeslizantesДокумент16 страницBomba de Paletas DeslizantesAxel GuerreroОценок пока нет
- Diseño de LevasДокумент34 страницыDiseño de LevasJairo Pascual ParceroОценок пока нет
- Arrancadores ReversiblesДокумент31 страницаArrancadores ReversiblesLeonela SalinasОценок пока нет
- Diseño de Ejes PDFДокумент38 страницDiseño de Ejes PDFAndres Montenegro VaquiroОценок пока нет
- Tarea 5.1Документ8 страницTarea 5.1FernandoLopezОценок пока нет
- La Condición de GrashofДокумент3 страницыLa Condición de GrashofErick Jiménez100% (1)
- Mecanismos IVДокумент47 страницMecanismos IVdanherzОценок пока нет
- An 04 Giesecke 3530 1ed Se 001-027Документ27 страницAn 04 Giesecke 3530 1ed Se 001-027Luis MartínezОценок пока нет
- Suspensión Independiente Por Barra de TorsiónДокумент20 страницSuspensión Independiente Por Barra de TorsiónJulio Cesar Casiano67% (3)
- TMM UTP Clase 1 2 3Документ55 страницTMM UTP Clase 1 2 3Steven Vilchez AyalaОценок пока нет
- Engranes y Trenes de EngranesДокумент23 страницыEngranes y Trenes de Engranesrainbowsix100% (1)
- Guiado de Sólido RigidoДокумент13 страницGuiado de Sólido RigidojulioleijaОценок пока нет
- Mecanismos de 4 Barras de GrashofДокумент18 страницMecanismos de 4 Barras de GrashofLuis Antonio BarbozaОценок пока нет
- trabajoIV MARIAMANRIQUEДокумент12 страницtrabajoIV MARIAMANRIQUEMariia Paula Manrique100% (1)
- PLANOS SOLID WORKS Tornillo-.5-13-..5 PLANO CON MEDIDASДокумент1 страницаPLANOS SOLID WORKS Tornillo-.5-13-..5 PLANO CON MEDIDASespi toanyoneОценок пока нет
- Ejes de TransmisiónДокумент23 страницыEjes de TransmisiónAlberto Alcocer EspinosaОценок пока нет
- Tornillos de PotenciaДокумент5 страницTornillos de PotenciaJesus Emmanuel Zarco SalazarОценок пока нет
- Unidad 2 Mecanismos ArticuladosДокумент39 страницUnidad 2 Mecanismos Articuladoseays_6950% (2)
- Exposicion Tornillo Sin FinДокумент15 страницExposicion Tornillo Sin FinDavid Quinto100% (1)
- Análisis y Síntesis de Mecanismos Unidad 3 y 4Документ19 страницAnálisis y Síntesis de Mecanismos Unidad 3 y 4Maya Medina0% (1)
- Practica Tornillo PotenciaДокумент4 страницыPractica Tornillo PotenciaRobercito Sauca100% (1)
- Tipos de Transmision de PotenciaДокумент1 страницаTipos de Transmision de PotenciaAntón SanchezОценок пока нет
- PROYECTO TRANSFERENCIA de CalorДокумент11 страницPROYECTO TRANSFERENCIA de CaloremilioC5Оценок пока нет
- Unidad 3Документ22 страницыUnidad 3Guillen Jan Carlo0% (1)
- Engranajes - InformeДокумент12 страницEngranajes - InformeAnGela Flores SaavedraОценок пока нет
- Transmisiones MecánicasДокумент33 страницыTransmisiones MecánicasesmeraldaОценок пока нет
- SIETMAS E INST, HID.2.2Diámetro Económico-1Документ14 страницSIETMAS E INST, HID.2.2Diámetro Económico-1Víctor Cruz MartínezОценок пока нет
- CaratulaДокумент35 страницCaratulaWalter Haro AraujoОценок пока нет
- ENGRANES DocumentoДокумент36 страницENGRANES DocumentoKevin Batista BejaranoОценок пока нет
- EngranajeДокумент56 страницEngranajeEulo Quispe MamaniОценок пока нет
- EngranajeДокумент29 страницEngranajemariaОценок пока нет
- Ensamblaje Abrazadera-Análisis Estático 4 Cartelas-1Документ34 страницыEnsamblaje Abrazadera-Análisis Estático 4 Cartelas-1Diego Carrera UrbinaОценок пока нет
- PETS-Uso de Pistola NeumáticaДокумент2 страницыPETS-Uso de Pistola NeumáticaDiego Carrera Urbina100% (1)
- Icon-R-Op03-Pc4 Checklist de Equipos MenoresДокумент8 страницIcon-R-Op03-Pc4 Checklist de Equipos MenoresDiego Carrera UrbinaОценок пока нет
- Informe de SOLIDWORKS FloXpres1Документ1 страницаInforme de SOLIDWORKS FloXpres1Diego Carrera UrbinaОценок пока нет
- Ensamblaje Abrazadera 2-Análisis Estático 4 Cartelas-3Документ32 страницыEnsamblaje Abrazadera 2-Análisis Estático 4 Cartelas-3Diego Carrera UrbinaОценок пока нет
- Plan de Cierre de Minas Rev 1Документ12 страницPlan de Cierre de Minas Rev 1Diego Carrera UrbinaОценок пока нет
- Manual de Inspeccion de Camiones Cisterna ArregladoДокумент50 страницManual de Inspeccion de Camiones Cisterna ArregladoDiego Carrera UrbinaОценок пока нет
- Informe RetroexcavadoraДокумент5 страницInforme RetroexcavadoraDiego Carrera UrbinaОценок пока нет
- Cableado Electrico. (In2.4)Документ52 страницыCableado Electrico. (In2.4)cchristt2584Оценок пока нет
- Tabla de Defecto Itv-Anexo 4Документ10 страницTabla de Defecto Itv-Anexo 4Diego Carrera UrbinaОценок пока нет
- Realidad Problematica EsquemaДокумент4 страницыRealidad Problematica EsquemaDiego Carrera UrbinaОценок пока нет
- Unecreto Epoxi Estructural 1Документ4 страницыUnecreto Epoxi Estructural 1Javi CadenaОценок пока нет
- PRG-SST-011 Programa PPCCAДокумент39 страницPRG-SST-011 Programa PPCCAMharyhurhy RiihoozzОценок пока нет
- Muestreo y Métodos de Análisis de Fluidos-LDGC.Документ14 страницMuestreo y Métodos de Análisis de Fluidos-LDGC.Luis GonzalezОценок пока нет
- Cronica La Guerra Entre Las CorrientesДокумент4 страницыCronica La Guerra Entre Las CorrientesDarwin Fabian FerrinОценок пока нет
- Kubi MuДокумент1 страницаKubi MuJoseОценок пока нет
- Diseño Hidraulico CRPДокумент12 страницDiseño Hidraulico CRPYuri Flores RamosОценок пока нет
- H2 PVT Recombinacion PDFДокумент35 страницH2 PVT Recombinacion PDFIvar Jonathan Espindola GudiñoОценок пока нет
- Mantención Cukurova Año 2013 IДокумент4 страницыMantención Cukurova Año 2013 IJorgeОценок пока нет
- Conductores Al y Cu DesnudosДокумент15 страницConductores Al y Cu DesnudosRosmer Ocando MoralesОценок пока нет
- 01 MD Huatanay Componente ObrasДокумент71 страница01 MD Huatanay Componente ObrasJhoel Delgado Salazar100% (1)
- S8 - Ejemplos y Ejercicios Resueltos - 8va SemanaДокумент18 страницS8 - Ejemplos y Ejercicios Resueltos - 8va SemanaSai132100% (3)
- Instalacion ElectricaДокумент26 страницInstalacion ElectricaChelo Rodriguez LazarteОценок пока нет
- Caso Harvard 2Документ3 страницыCaso Harvard 2Luis0% (1)
- Ejercicios Mezcla Rapida - Mezcla LentaДокумент6 страницEjercicios Mezcla Rapida - Mezcla LentaJunior Steven Solorzano Fabian57% (7)
- Geotermia, IntroducionДокумент26 страницGeotermia, IntroducionDiego CarriónОценок пока нет
- Lubrax Hydra XP PDFДокумент2 страницыLubrax Hydra XP PDFFelipe BecerraОценок пока нет
- Lab 8 Balance de LineaДокумент6 страницLab 8 Balance de LineaHenrry Gonzales Manuel0% (1)
- Cartilla en Manejo de La ArcillaДокумент10 страницCartilla en Manejo de La ArcillaEfrain Pacosillo CaritaОценок пока нет
- EVALUACION 1 FenomenosДокумент3 страницыEVALUACION 1 FenomenosDayana LascanoОценок пока нет
- GPRS ArduinoДокумент40 страницGPRS ArduinoBoris PQОценок пока нет
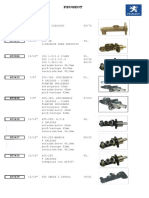
- PeugeotДокумент30 страницPeugeotאליהו אסתי אנדרדОценок пока нет
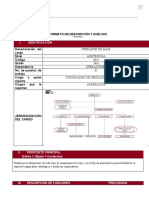
- Manual de Funciones - Operadores de IzajeДокумент10 страницManual de Funciones - Operadores de IzajeCatalina SandovalОценок пока нет
- Clase 2 Tema 2Документ46 страницClase 2 Tema 2Pablo ChinchillaОценок пока нет
- F-DC-04 Manual de PrácticasДокумент82 страницыF-DC-04 Manual de PrácticasOribe SalinasОценок пока нет
- PowerFlex 755 HiHP - Alarma 10130, 10131 y 10132Документ1 страницаPowerFlex 755 HiHP - Alarma 10130, 10131 y 10132Veronica HansonОценок пока нет
- Tuberías de Polietileno de Alta DensidadДокумент1 страницаTuberías de Polietileno de Alta DensidadSantiago Loría NavaОценок пока нет
- Silabos EstadisticaДокумент7 страницSilabos EstadisticafelixОценок пока нет
- Control Fuzzy de Iluminación Mediante MATLABДокумент8 страницControl Fuzzy de Iluminación Mediante MATLABjlqykОценок пока нет
- Memorias Proyecto PuentesДокумент50 страницMemorias Proyecto PuentesMaqMaikОценок пока нет
- PROTOCOLO DE MANTENIMIENTO PREVENTIVO DE Elevador Plataforma - Docx El PilarДокумент6 страницPROTOCOLO DE MANTENIMIENTO PREVENTIVO DE Elevador Plataforma - Docx El PilarHumberto Huamani PalominoОценок пока нет