Академический Документы
Профессиональный Документы
Культура Документы
Automatique Linéaire: Asservissement & Regulation
Загружено:
Ahmed RhifОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Automatique Linéaire: Asservissement & Regulation
Загружено:
Ahmed RhifАвторское право:
Доступные форматы
Institut Suprieur des Sciences Appliques et de Technologies de Sousse
FASCICULE DE TRAVAUX PRATIQUES
AUTOMATIQUE LINEAIRE : ASSERVISSEMENT ET REGULATION
Par : Ahmed RHIF
Dpartement Gnie lectronique
Version 1.1- Janvier 2011 (Brouillon)
Anne Universitaire 2010-2011
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Sommaire
Chapitre 0
Le correcteur PID...3
Chapitre1 Conception dune carte de commande dun actionneur base de PID13 TP1 : Commande de Niveau et de Dbit ..18 TP2 : Commande dun moteur pas pas25
TP3 : Commande de temprature29 TP4 : Commande de vitesse et de position34
TP5 : Simulateur de processus.42 TP6 : Simulation des systmes continus et discrets.48
2
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Chapitre 0
Le Correcteur PID
1 Prsentation du rgulateur PID Un rgulateur Proportionnel Intgral Driv (PID) est un organe de contrle permettant deffectuer une rgulation en boucle ferme dun systme industriel. Cest le rgulateur le plus utilis dans lindustrie, et il permet de contrler un grand nombre de procds. En effet, la rgulation sert liminer l'erreur calcule entre la consigne et la sortie mesure. Le PID contient trois actions en fonction de cette erreur : Une action Proportionnelle : l'erreur est multiplie par un gain kp. Une action Intgrale : l'erreur est intgre sur un intervalle de temps, puis multiplie par Une action Drive : l'erreur est drive suivant un temps, puis multiplie par un gain kd.
un gain ki. Il existe plusieurs architectures possibles pour combiner les 3 effets (srie, parallle ou mixte), on prsente ici une architecture parallle:
Figure 1 Architecture dun correcteur PID en parallle
La fonction de transfert avec la transforme de Laplace du rgulateur PID parallle est la somme des 3 actions: C ( p ) = k p + k i avec p =
du dt
1 + kd p p
3
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
1.1
Laction proportionnelle
Laction proportionnelle permet de crer un signal de commande U proportionnelle au signal derreur e. Le facteur de proportionnalit kp est la transmittance du correcteur, en loccurrence son gain statique : U=kp*E. Cette action permet de modifier la dynamique du systme en boucle ferme, une augmentation du gain entrane une diminution de lerreur statique, rend le systme plus rapide mais augmente son instabilit. 1.2 Laction intgrale I
Cette action permet de crer un signal de commande U qui est lintgrale du signal derreur. Lintrt principal dajouter dans la chane de commande un tel correcteur est dannuler lerreur indicielle en rgime permanent, mais en rgime transitoire ce correcteur affecte la rapidit de processus et augmente son instabilit en introduisant un dphasage supplmentaire de -90. 1.3 Laction drive D
Cette action cre un signal de commande U qui est la drive du signal derreur. Lintrt principal dun tel correcteur est son effet stabilisant (il soppose aux oscillations). Cette action prsente le dfaut de ne pas transmettre le signal, donc elle ne peut pas tre utilis seul. 2 Rglage dun PID
Le rglage d'un PID consiste dterminer les coefficients kp, ki et kd afin d'obtenir une rponse adquate du procd et de la rgulation. L'objectif est d'tre robuste, rapide et prcis. Il faut pour cela limiter le ou les ventuels dpassements (overshoot).
La robustesse est sans doute le paramtre le plus important et dlicat. On dit qu'un
systme est robuste si la rgulation fonctionne toujours mme si le modle subit une perturbation.
La rapidit du rgulateur dpend du temps de monte et du temps d'tablissement du Le critre de prcision est bas sur l'erreur statique.
rgime stationnaire.
4
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Figure 2 Rponse dun systme asservis
Les correcteurs PI et P.I.D sont parmi les correcteurs analogiques les plus utiliss. Le problme principal rside dans la dtermination des coefficients kp, ki, kd du correcteur. Plusieurs mthodes exprimentales ont t dveloppes pour dterminer ces coefficients La mthode dveloppe par Ziegler et Nichols nest utilisable que si le systme tudi supporte les dpassements. La mthode consiste augmenter progressivement le gain dun correcteur proportionnel pur jusqu' la juste oscillation. On relve alors le gain limite (klim) correspondant et la pulsation des oscillations. partir des ces valeurs Ziegler&Nichols proposent des valeurs permettant le rglage des correcteurs P, P.I et P.I.D Les paramtres du PID influencent la rponse du systme de la manire suivante : . Prcision Rapidit Stabilit
RHIF Ahmed
P + + -
I + -
D ++ ++ - : mauvaise. + : bonne. ++ : Trs bonne. 5
Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Principe d'asservissement : Exemple explicatif
L'asservissement consiste tout simplement en la rcupration d'une information sur la sortie du systme puis en son utilisation pour ajuster la tension de commande. Il existe de nombreuses mthodes d'asservissement, nous prsentons ici celle que nous utilisons le plus souvent dans notre TP (et la plus connue de toutes) : le PID (Proportionnel Intgrale Drive). 3.1 Principe d'asservissement PID
Dans la figure 3, lensemble constitu du systme G(p), de lactionneur A(p) et ventuellement du dispositif de correction C(p) est appel chane directe. Lensemble constitu de la mesure et du dispositif B(p) est appel chane de retour ou boucle de retour. Dans certain cas, le dispositif B(p) peut-tre inexistant : on parle de boucle retour unitaire. Le but dune boucle dasservissement est de faire en sorte que la sortie du systme suive la consigne dentre. Pour cela, au travers du capteur, la sortie set rinjecte lentre dans un comparateur (soustracteur idal) .La diffrence entre lentre et la sortie (appele erreur) est calcule et forme le signal de commande u(t).
Figure 3 Schma bloc dun systme asservis
Dans cette partie nous allons traiter lexemple dun moteur dun bras manipulateur dun robot.
Figure 4 Boucle dasservissement du systme
6
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
1. 2. 3. 4.
Ci : Consigne initiale (ce qu'on veut qu'il fasse) e : erreur entre la consigne initiale et la ralit C : Consigne applique au moteur R : Grandeur relle mesure (ralit)
Le principe de base de tout asservissement est de prendre des mesures la sortie, de les rinjecter l'entre pour comparer la consigne afin d'obtenir l'erreur (ie la diffrence entre la mesure relle et la consigne demande). Quand elle est nulle, le robot a atteint sa destination et donc il n'y a plus rien actionner. Ce systme est dit en boucle ferme, puisque la sortie du systme est rinjecte dans l'entre. Maintenant caractrisons le PID, c'est dire le Proportionnel, Intgral, Driv. Ces trois blocs correspondent chacun une fonctionnalit : Ki est le coefficient intgral, Kp le coefficient proportionnel et Kd le coefficient driv. Commenons par le plus simple : l'asservissement Proportionnel. 3.2 Asservissement P
L'asservissement Proportionnel est le plus important du PID, car c'est principalement lui qui permet de donner de la puissance au moteur. Pour voir son impact sur le dplacement du robot, il suffit d'annuler les autres coefficients Ki=0 et Kd=0. En faisant varier la valeur de Kp, on peut observer son impact. Voici quelques courbes que nous avons obtenues ainsi :
7
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
La courbe noire reprsente la consigne initiale Ci (chelon) et la courbe bleue le rsultat rel (R). Les rsultats sont simples analyser, plus Kp est grand plus on atteint la consigne rapidement. Mais lorsque Kp augmente, des oscillations autour de la consigne apparaissent et surtout, la consigne n'est pas exactement atteinte. Cette petite diffrence entre la grandeur relle et la grandeur dsire une fois que le systme est stabilis s'appelle l'erreur statique. Pour compenser cette erreur statique, nous allons rajouter le terme Intgral. 3.3 Asservissement PI
Pour liminer l'erreur statique, l'ide est ici d'intgrer l'erreur depuis le dbut et d'ajouter cette nouvelle erreur la consigne jusqu' ce qu'elle s'annule. Lorsqu'elle est nulle, le terme intgral se stabilise et compense parfaitement l'erreur entre la consigne et la valeur relle. Pour voir ceci de prs, il suffit de mettre Kp=1 puis de faire varier le coefficient de l'intgrale Ki afin de voir son impact sur le systme:
Les choses s'amliorent, on arrive liminer l'erreur statique. On voit comme pour l'asservissement P qu'en augmentant le coefficient Ki on atteint plus rapidement la consigne mais que notre systme oscille plus violemment et dpasse la consigne de nombreuses fois. C'est pour remdier ce second problme que l'on ajoute le terme Driv. 8
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
3.4
Asservissement PID
L'ide est prsent de driver l'erreur et d'ajouter cette valeur celle obtenue prcdemment afin de limiter les dpassements. En faisant varier le terme driv, on obtient les rsultats suivants :
Comme vous pouvez le voir sur les courbes, en ajoutant le terme driv, on diminue le dpassement (en anglais overshoot). 3.5 Rsum
Pour rsumer, le rgulateur PID est un rgulateur boucle ferme qui utilise la diffrence entre l'entre et la sortie pour modifier la consigne dans le but d'atteindre une rponse gale la valeur d'entre. Pour ceci il utilise 3 termes:
Le terme Proportionnel qui permet d'augmenter la vitesse de monte (atteint la consigne le plus rapidement possible). Le terme Intgral qui rduit l'erreur statique. Le terme Driv qui rduit le dpassement. Attention
Le terme driv peut causer des instabilits dans le systme si on l'augmente de manire inconsidre ou si on effectue un asservissement de la vitesse. En effet, la drive d'une vitesse est une acclration, donc on amplifie les bruits d'acclration. Du coup, si on travaille sur une rgulation de vitesse, il vaut mieux diminuer ce coefficient ou mme l'annuler et se contenter de jouer les 2 autres termes.
9
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
4 Exemples de systmes Exemple 1 : Antenne parabolique
Ce systme ncessite un asservissement et une rgulation de position et de vitesse. Sa fonction de transfert de son actionneur est H ( p ) = 10 . 1 + 0.25 p
Exemple 2 : Sous marin automatique (H160)
10
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Fonction de transfert: elle fait la relation entre langle dinclinaison et le braquage de
plonge s qui assure la commande du systme et profondeur z.
H ( P) = 0.456 p + 1.424 p 2 + 0.366 p + 1
3
Exemple 3 : Robot ROVER (Spirit)
11
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Ce robot, qui opre sur la plante Mars, besoin de plusieurs types dasservissement : celui le plus recommand est : lasservissement de position. ROVER peut tre reprsenter par la fonction de transfre suivante H ( P ) = 1
( p + 1)( p + 3)
Conclusion : lasservissement et la rgulation sont appliqus imprativement dans les
diffrents types de systmes simples quils soient ou compliqus.
12
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Chapitre 1 Conception dune carte de commande dun actionneur base de PID
Introduction
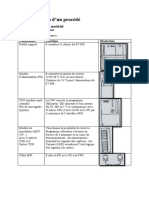
Cette carte a pour but de commander laxe dun moteur courant continu (marche /arrt) pour positionner un axe de rotation dun parabole. Pour cela, la carte est compose des parties suivantes : - lecture de la consigne de rfrence ; - lecture de la position de laxe par le biais du codeur, comptage du signal de position et conversion numrique analogique du signal ; - gnrateur de signal derreur ; - un rgulateur PID ; - un tage de puissance. Le processus de commande est schmatis comme suit :
Lecture de la consigne Gnrateur du signal derreur de position Rgulation PID Amplification et tage de puissance Moteur
Conversion numrique analogique Comptage des impulsions Lecture de la position
Codeur 13
RHIF Ahmed
Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Voici la boucle dasservissement du systme tudi.
1/Gnrateur de signal derreur
Le gnrateur du signal derreur a pour but de comparer la valeur de la consigne avec la valeur de retour du capteur. La sortie du gnrateur derreur est injecte au PID afin minimiser lerreur du systme ou lliminer (cas idal). En pratique, nous pouvons utilis les amplificateurs oprationnels LM324N pour raliser cette fonction.
Consigne
Capteur
Schma lectrique du gnrateur du signal derreur
2/Rgulateur PID
Les trois tages reprsents dans la figure suivante sont respectivement : -Ltage proportionnel ; -Ltage intgrateur ; -Ltage drivateur ;
14
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Schma lectrique du PID
Les valeurs des rsistances et capacits de chaque tage peuvent tre calcul par le biais de la simulation de la rgulation de position avec Matlab ou par les formule suivantes : 1. Etage proportionnel
R2 = KP R1
2. Etage intgrateur
1 = Ki R1 * Ci
3. Etage proportionnel
Rd * Cd = K d
3/Etage de puissance
Dans projet nous avons utilis comme tage de puissance : ltage PUSH PULL qui permet de commuter la rotation du moteur prcd dun amplificateur de tension uA741 de gain damplification 5. Ltage PUSH PULL est un amplificateur de puissance de classe AB. Ce sont les montages de puissance les plus rpandus. Pour liminer la distorsion au dbut de la caractristique de charge des TS, nous rencontrons des lments de polarisation qui dcalent le point de repos Q des transistors juste au dbut de conduction. La tension UBEQ est situe juste 0,6V. Nous pouvons rencontrer des diodes, des varistances, un transistor, qui permettent d'obtenir le dcalage de 0,6V pour chaque point de repos Q. 15
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Dans notre cas il s'agit de deux transistors de type TIP41C et TIP42C monts en collecteur commun. De plus, trs souvent, des rsistances de trs faible valeur sont rajoutes dans les circuits d'metteur de chaque TS, pour limiter le courant (fusibles). L'utilisation d'une alimentation fractionne (V+ et V-) permet de supprimer le condensateur de sortie. De ce fait, la sortie se trouve 0V par rapport la terre. Les quatre diodes fixent la tension de polarisation ncessaire des transistors. La compensation thermique est ralise par des thermistances. Voici le schma du montage PUSH PULL ralis :
Montage PUSH PULL
4/Etage dalimentation
La demande d'une alimentation trs stable ncessite des circuits d'alimentation mme dans les appareils portables qui sont pourtant aliments avec des gnrateurs continus (piles ou accumulateurs). Cinq tapes sont ncessaires pour avoir une carte dalimentation dite complte : - la transformation dnergie - le redressement - le filtrage - la rgulation - la limitation du courant de sortie En suivant ces tapes, nous avons conu deux alimentations une +/- 18V et lautre +/-5V. 16
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Schma lectrique de la carte dalimentation
17
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
TP1 : Commande de Niveau et de Dbit
Partie thorique
1.1 Prsentation du systme Le systme que nous allons tudi se compose de trois modules : G30A/EV, G30B/EV et
TY30A/EV.
Le module G30A/EV contient la partie lectronique de contrle et de conditionnement des grandeurs physiques :
18
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
SET POINT&ERROR AMPLIFIER : Bloc qui sert fournir la consigne du PID CONTROLLER : Bloc qui reprsente le correcteur PID. POWER AMPLIFIER : Bloc qui amplifie la puissance du signal provenant du
systme ainsi quamplifier lerreur (lerreur devient significative) calculer par le comparateur.
correcteur PID pour faire fonctionner lactionneur (moteur). Lunit TY30A/EV a pour tche la production de ces grandeurs physiques et possde deux capteurs : un capteur de niveau et un capteur de dbit. Enfin le module G30B/EV contient les blocs de commande et de rgulation du systme en question :
LEVEL PRESURE SIGNAL CONDITIONNER : Bloc de commande du capteur FLOW RATE SIGNAL CONDITIONNER : Bloc de commande du capteur de V/F CONVERTER : Bloc qui convertie la tension en frquence (signal dhorloge) F/V CONVERTER : Bloc qui convertie la frquence en tension ncessaire pour faire
de pression sa sortie reprsente la sortie en volume du systme. pression sa sortie reprsente la sortie en dbit du systme. ncessaire pour faire fonctionner lafficheur. fonctionner lafficheur.
1.2
Outils a utiliss Les modules G30A/EV, G30B/EV et TY30A/EV.
Un micro ordinateur Un multimtre
2 Partie exprimentale Dans cette partie nous allons raliser deux types de rgulation : rgulation automatique de
niveau et rgulation automatique de dbit.
2.1 Rgulation automatique de niveau Dans la suite on doit raliser les connexions suivantes :
Connexions entre G30A et G30B :
G30A
+12 Vcc (1.5A) Connexions entre G30A et TY30A :
G30B
Borne 15
19
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Relier les bornes + et - prsente sur le module G30A aux bornes de mme signe de lunit TY30A. Relier la prise 8 ples du module G30A celle de lunit TY30A. Alimentation des modules G30A : Brancher les alimentations de +/-12Vcc 0.5 A avec la sortie du bloc Power amplifier et de 5 Vcc Alimentation du module G30B : Brancher les alimentations de +/-12 Vcc 0.5 A et de 12 Vcc 1.5 A
2.1.1 Rgulation automatique de niveau en boucle ouverte Raliser les oprations suivantes :
Sur G30A : relier la borne 6 7 et 8 14 (lafficheur visualise le niveau atteint) Sur G30B : relier la borne 2 Set IN et 4 13. Ouvrir moiti la vanne V1 du module TY30A et mettre V2 sur la position ON Mettre I1 a la position LEVEL 1) Schmatiser laide des schmas bloc la boucle dasservissement du circuit ralis ensuite noter vos observations et commenter le rsultat obtenu.
2.1.2 Contrle automatique de niveau en boucle ferme Raliser les oprations suivantes :
Sur G30A : relier la borne 6 7 et 8 14 (lafficheur visualise le niveau atteint) Sur G30B : relier la borne 2 Set IN, 4 5, 6 7, 8 9, 10 11 et 12 13. Relier la borne 6 du module G30A avec la borne 3 du module G30B. Ouvrir moiti la vanne V1 du module TY30A et mettre V2 sur la position ON Mettre I1 a la position LEVEL Rgler le PID sur des valeurs minimales 1) Schmatiser laide des schmas bloc la boucle dasservissement du circuit ralis ensuite remplir le tableau1 (sachant que 1V60ml) et commenter le rsultat.
SET-POINT
0V 1V 2V 3V
NIVEAU (ml)
Erreur Pratique (V)
Erreur thorique (ml)
20
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
4V 5V 6V 7V 8V
Tab1. Commande de volume en boucle ferm
2) Vider le rservoir et refaire les mmes mesures de la table 1 avec PID rgul sur les valeurs moyennes et commenter. 3) Tracer les courbes NIVEAU=F (SET-POINT) comparer les deux cas. Conclure.
2.1.2.1
Effet de laction proportionnelle du PID
Effectuer les mmes connexions que lexercice prcdent. Mettre linterrupteur I1 a la position LEVEL Activer que laction proportionnelle du PID (relier que les bornes 6 et 7 du module
G30B) et mettre le potentiomtre PROPORTIONAL au minimum (gain = 1). 1) A laide du bloc SET-POINT faite varier la tension et remplir la table 2. 2) Mettre le gain du bloc PROPORTIONAL la valeur 10. Pour cela dbrancher lentre et la sortie du bloc PID CONTROLLER et appliquer a lentre une tension fixe 0.5 V provenant du bloc SET-POINT , remettez la connexion lentre et modifier le gain travers le potentiomtre PROPORTIONAL jusqu avoir sur la borne 12 une tension de 5 V. Remettez la connexion la sortie du bloc PID et remplir le reste du tableau 2 (N.B le rservoir doit tre vide). Remplissez le tableau suivant :
SET-POINT
0V 1V 2V 3V 4V 5V 6V
ERREUR (V) Gain=1
ERREUR (V) Gain=10
21
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
7V 8V
Tab2. Effet de laction proportionnelle
3) Commenter le rsultat obtenu. Conclure. 4) Tracer les figures ERREUR = F (SET-POINT), comparez les deux courbes.
2.1.2.2 Effet des actions intgrale et drivative du contrleur PID
Effectuer les mmes connexions que lexercice prcdent. 1) Activer que laction proportionnelle du PID. A laide du bloc SET-POINT appliquer une tension 4V et mesurer la tension sur la borne 4 (sortie de lamplificateur derreur) pour les valeurs minimale et maximale du rgulateur proportionnel. 2) Ajouter laction intgrale (relier 8 9) et mettre le potentiomtre la valeur moyenne. Mesurer lerreur du systme pendant le rgime permanent. 3) Mettre les potentiomtres INTEGRATIVE et PROPORTIONAL au minimum, mesurer lerreur du systme. Interprtez les rsultats. 4) Si on marque des oscillations dites pourquoi le systme nest plus stable. 5) Activer laction drive (relier 10 11). Varier la valeur de laction drivative et interprtez votre observation. 6) Ouvrir la vanne V2 la moiti. Chercher le meilleur rglage du PID pour une certaine position de V2. Ecrire lquation du transfert du correcteur correspondant.
2.1.3 Module MFI-U/EV Cette unit dinterface industrielle permet de transformer nimporte quel ordinateur en un
quipement de type industriel pour des applications dacquisition de donnes, analyse, supervision et contrle. Raliser les connexions suivantes : Sur G30A 6-7, 8-14 Mettre I1 sur LEVEL, I3 su FREQ, I4 sur ON Entre G30B et MFI-U : 13-Analog OUT0, GND-GND Entre G30A et MFI-U : 6-Analog IN0, GND-GND Paramtres PID : P=10, I=0.01, D=10
2.2 Contrle automatique de dbit Dans la suite on doit raliser les connexions suivantes :
22
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Connexions entre G30A et G30B :
G30A
+12 Vcc (1.5A) Borne 22 Connexions entre G30A et TY30A :
G30B
Borne 15 Borne 3
Relier les bornes + et - prsente sur le module G30A aux bornes de mme signe de lunit TY30A. Relier la prise 8 ples du module G30A celle de lunit TY30A. Alimentation des modules G30A : Brancher les alimentations de +/-12Vcc 0.5 A avec la sortie du bloc Power amplifier et de 5 Vcc. Alimentation du module G30B : Brancher les alimentations de +/-12 Vcc 0.5 A et de 12 Vcc 1.5 A
2.2.1 Contrle automatique de dbit en boucle ferme Sur G30A : relier la borne 19 20 et 19 14 (lafficheur visualise la valeur du dbit)
Sur G30B : relier la borne 4 5, 6 7, 8 9, 10 11 et 12 13. Mettre I1 sur FLOWRATE Mettre les gains du PID sur des valeurs moyennes. 1) En utilisant le bouton SET-POINT & ERROR AMPLIFIER changer la tension de la consigne et remplir la table 3. Ensuite fermer lgrement la vanne V2 et remplissez de nouveau le tableau ci-dessous.
SET-POINT
0V 1V 2V 3V 4V 5V 6V 7V 8V
DEBIT (1)
DEBIT (2)
Table3. Commande de dbit en boucle ferme
23
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
2) Tracez les figure DEBIT = F (SET-POINT), Interprter les rsultats.
2.2.2 Effet de laction proportionnelle du PID Effectuer les mmes connexions que lexercice prcdent.
Mettre linterrupteur I1 a la position FLOWRATE Activer que laction proportionnelle du PID (relier que les bornes 6 et 7 du module G30B) et mettre le potentiomtre PROPORTIONAL au maximum (gain = 50) 1) A laide du bloc SET-POINT appliquer une tension 3.2 V (2 l/mn) et mesurer lerreur du systme. Observer que le systme rgul par laction proportionnelle seulement est instable. Expliquer. 2) Diminuer le gain du bloc PROPORTIONAL jusqu la valeur minimale, augmenter le gain peu peu et not la valeur du gain quand le systme se stabilise. A ce point mesurer lerreur et expliquer le fait observ.
2.2.3 Effet des actions intgrale et drivative du PID Effectuer les mmes connexions que lexercice prcdent.
1) Activer que laction proportionnelle du PID, A laide du bloc SET-POINT appliquer une tension 3.2V (2 l/mn) et mesurer lerreur sur la borne 4 (sortie de lamplificateur derreur), une variation de cette tension (lerreur) indique que le systme nest pas stable. 2) A ce point, activer laction intgrale (relier 8 9) et rguler le potentiomtre jusqu avoir le rgime permanent. Mesurer lerreur du systme pendant le rgime permanent. 3) Fixer les potentiomtres INTEGRATIVE et PROPORTIONAL au minimum, mesurer lerreur du systme. Comparez les rsultats. 4) Activer laction drive (relier 10 11). Varier la valeur de laction drivative et commentez votre observation 5) Chercher le meilleur rglage du PID pour une certaine position de V1. Ecrire lquation du transfert du correcteur correspondant.
24
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
TP2 : Commande dun moteur pas pas
Partie thorique
1.1 Prsentation du systme Le systme se compose dun moteur pas pas TY16/EV et du module G16/EV qui assure la
commande de ce moteur.
Le module G16/EV se compose de diffrents blocs parmi eux : Le bloc GENERATOR permet de produire un signal impulsion pour faire tourner le moteur. Ce signal peut tre automatique ou manuel en utilisant MANUAL CLOCK. Le bloc UP/DOWN COUNTER est un compteur/ dcompteur 4bits. Le BCD-TO-DECIMAL DECODER sert convertir les signaux dentres en code dcimal. 25
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
1.2
Les moteurs Pas Pas 4 phases : principe de fonctionnement
La circulation d'un courant lectrique dans un bobinage entrane l'apparition d'un champ magntique, comme le dtaille la figure de gauche dans le cas du solnode, et donc la prsence de ples Nord et Sud (deux ples de mme nature se repoussent, deux ples Nord et Sud s'attirent) ; c'est sur ce principe de base que repose le fonctionnement de tout moteur lectrique, et, de manire plus gnrale, de bon nombre de dispositifs lectro-mcaniques : relais, compteurs, galvanomtres, certains haut-parleurs ou microphones, gches lectriques de porte etc. Le moteur pas pas, reprsent ci dessous, est constitu d'un rotor aimant (en gris) avec deux ples, Nord et Sud, ainsi que d'un double-stator : chacune de ces deux parties, est associ un bobinage avec un point milieu et deux phases ; en alimentant l'une ou l'autre des phases, on peut ainsi inverser l'aimantation au niveau du stator correspondant.
La table de vrit ci-dessous rsume les tats successifs des diffrentes phases ; l'tat logique indique si la phase est alimente ("1") ou non ("0").
Etape 1 Etape 2 Etape 3 Etape 4 Etape 1... Bobinage 1, Phase 1 Bobinage 1, Phase 2 Bobinage 2, Phase 1 Bobinage 2, Phase 2
0 1 1 0 1 0 1 0 1 0 0 1 0 1 0 1 0 1 1 0 26
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Et le chronogramme correspondant :
Le chronogramme laisse apparatre que pour le bobinage 1, les signaux de contrle de la phase 1 (B1,P1) et de la phase 2 (B1,P2) sont complmentaires ; il en va de mme pour le bobinage 2, concernant (B2,P1) et (B2,P2) ; comme nous le verrons dans l'tude du schma lectrique, la gnration des signaux de commande est une opration assez simple.
1.3
Outils a utiliss Les modules G16 et TY16/EV.
Un micro ordinateur
Partie exprimentale
2.1 Pilotage unipolaire par pas entier (1 phase) Appliquer la borne 3 le signal de sortie du bloc GENERATOR (borne 1)
Appliquer les signaux A1, B1, A2 et B2 du bloc UNIPOLAR-FULL STEP (1 PHASE) aux borne correspondantes du bloc POWER DRIVERS Relier le module G16 lunit externe TY16/EV Alimenter le module Mettre I1 la position UNIPOLAR I2 la position FULL-STEP I3 sert imposer le sens de rotation Refaire le mme travail en utilisant une entre manuelle MANUAL CLOCK Tracez les formes donde des signaux dentre et de sortie.
27
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
2.1.1 Module MFI-U/EV Cette unit dinterface industrielle permet de transformer nimporte quel ordinateur en un
quipement de type industriel pour des applications dacquisition de donnes, analyse, supervision et contrle. Connexion sur le module : A1-A1, B1-B1, B2-B2 Mettre I1 sur unipolar, I2 sur Full-Step, I3 sur CW (COMP) Connexion entre TB1 adapter et MFI-U 9-Digital OUT0, 8-Digital OUT1, GND-GND
2.2 Pilotage unipolaire par pas entier (2 phases) Refaire le mme cblage de lexercice prcdent en appliquant les signaux A1, B1, A2 et B2
du bloc UNIPOLAR-FULL STEP (2 PHASES) aux borne correspondantes du bloc POWER DRIVERS . Tracez les formes donde des signaux dentre et de sortie.
2.3 Pilotage unipolaire par demi-pas Refaire le mme circuit en appliquant cette fois les signaux A1, B1, A2 et B2 du bloc
UNIPOLAR-HALF STEP aux borne correspondantes du bloc POWER DRIVERS Tracez les formes donde des signaux dentre et de sortie. Comparez les rsultats obtenus pour les trois exercices prcdents (1 phase, 2 phases et demi pas).
2.4 Pilotage bipolaire par pas entier Appliquer la borne 3 le signal de sortie du bloc GENERATOR (borne 1)
Appliquer les signaux A1, B1, A2 et B2 du bloc UNIPOLAR-FULL STEP (1 PHASE) aux borne correspondantes du bloc POWER DRIVERS Relier le module G16 lunit externe TY16/EV Alimenter le module Mettre : I1 la position BIPOLAR I2 la position FULL-STEP I3 sert imposer le sens de rotation Refaire le mme travail en utilisant une entre manuelle MANUAL CLOCK Tracez les formes donde des signaux dentre et de sortie. Comparez tout les rsultats. 28
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
TP3 : Commande de temprature
Partie thorique
1.1 Prsentation du systme On dfinit sous le nom de transducteur les dispositifs permettant de convertir une grandeur
physique en une autre grandeur. Dans notre cas, nous allons traiter la temprature qui va tre convertie en grandeur lectrique. Pour cela nous avons besoins des conditionneurs de signaux pour pouvoir manipuler cette grandeur.
29
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Le conditionneur STT : fait correspondre une variation de temprature de 0 150C une tension de sortie variable de 0 8V. Les Thermistors : sont des transducteur variation de rsistances. La composition de ces capteurs de temprature considrs RTD (Resistance Temperature Detector) peut avoir un coefficient de temprature ngatif NTC ou positif PTC. Le Thermocouple : est constitu par deux conducteur mtalliques formant un contact galvanique. On le place dans le milieu dont on veut mesurer la temprature.
1.2
Outils a utiliss Les modules G34/EV et TY34/EV.
Un multimtre
Partie exprimentale
2.1 Traage de la courbe caractristique du transducteur au silicium Relier le transducteur son propre conditionneur de signaux
Relier la sortie du bloc SET-POINT borne 2 lentre du bloc PID CONTROLLER borne 3. Relier la sortie du bloc PID CONTROLLER lentre du bloc HEATER AMPLIFIER . Relier la sortie HEATER du bloc POWER AMPLIFIER aux rsistances du four. Relier la sortie COOLER du bloc HEATER AMPLIFIER au ventilateur de lunit TY34/EV Alimenter le bloc POWER AMPLIFIER au 24Vca. Relier la sortie du conditionneur de signaux STT lentre feedback du bloc ERROR AMPLIFIER Relier les bornes 5 et 6 et mettre les potentiomtres P2 et P3 du PID mi-course. Relier le multimtre la sortie du conditionneur de signaux et le programmer sur lchelle 20 Vcc. En partant de la temprature ambiante et en intervenant sur le bouton SET-POINT , Augmenter la temprature du four par palier de 10C (pour cela il faut augmenter la tension de la borne 2). Mesurer la tension de sortie du conditionneur de signaux.
N.B. Ne pas dpasser les 150C
Schmatiser laide des schmas bloc le circuit dj dcrit. Remplir le tableau suivant : 30
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
T (C)
30 40 50 60 70 80 90 100 110 120 130 140 150 Tracez la courbe correspondante PROP.OUT = F (T)
PROP.OUT (V)
2.2 Dtermination de la linarit du transducteur de temprature au silicium Dans cette partie nous allons dterminer la valeur, en pourcentage, de linarit du
transducteur.
La caractristique du thermistor NTC
Refaire le mme travail que lexercice prcdent est changer le conditionneur des signaux STT par le conditionneur NTC.
N.B. si la temprature dpasse les 110C il faut enlever le thermistor NTC pour ne pas
lendommager
Refaire nouveau un tableau Tension- Temprature et tracer la courbe correspondante.
2.3 La caractristique de la thermorsistance Refaire le mme travail que pour lexercice 2.1 en remplaant STT par PTC.
N.B. si on dpasse les 150C il faut imprativement enlever le transducteur.
Refaire nouveau un tableau Tension- Temprature et tracer la courbe correspondante.
31
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
2.4 La caractristique du thermocouple Refaire le mme travail que pour lexercice 2.3 en remplaant le conditionneur de signaux
pour thermorsistance par le conditionneur de signaux pour thermocouple.
N.B. si on dpasse les 150C il faut imprativement enlever le transducteur.
Refaire nouveau un tableau Tension- Temprature et tracer la courbe correspondante.
2.5 Dtermination de la constante du temps des transducteurs de temprature On commence raliser le contrle en boucle ferm en utilisant la thermorsistance et
mesurer la vitesse de rponse du transducteur au silicium en lintroduisant dans le four lorsque ce dernier est temprature stable et connue. Ensuite dbrancher le transducteur de faon quil soit la temprature ambiante. Rgler SET-POINT pour une temprature de 100C On commence les mesures de la tension de sortie (borne 23) que lorsque la temprature se stabilise 100C Mesurer la temprature releve par le transducteur en fonction du temps et dresser un tableau temps/temprature Tracer la courbe et dterminer le temps ncessaire pour obtenir 63C. ce temps sappelle constante de temps du transducteur
2.6 Caractristiques du processus de temprature Dans cette partie nous allons raliser un asservissement de temprature.
Relier SET-POINT borne 2 POWER AMPLIFIER borne 11 Relier HEATER et COOLER lunit TY34/EV Mettre fond le potentiomtre de SET POINT a +8V Remplir le tableau ci-dessous
N
1 2 3 4 5 6
T (min)
0.5 1 1.5 2 2.5 3
T (C)
32
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
7 8 9 10
3.5 4 4.5 5
Remarque : on nglige la constante thermique du thermomtre par rapport aux constantes des
transducteurs. Tracer la courbe temps/temprature Descendre brusquement le SET POINT zros et mettre le COOLER POWER AMPLIFIER sur MAN pour raliser le refroidissement manuel. Refaire un nouveau tableau et tracer la courbe correspondante.
2.6.1 Stabilisation du contrle de processus Refaire les mmes connexions comme lexercice prcdent
Avant dalimenter le circuit mettre le potentiomtre proportionnel Kp du PID sur valeur minimale. Alimenter le circuit et augmenter Kp jusqu' le systme soit stable. Introduire laction intgrale Ki en reliant 7 et 8. Varier Ki jusqu' le systme soit stable. Introduire laction drivative Kd. Varier Kd en commenant par des constantes de temps leves jusqu' le systme soit stable.
2.6.2 Module MFI-U/EV Cette unit dinterface industrielle permet de transformer nimporte quel ordinateur en un
quipement de type industriel pour des applications dacquisition de donnes, analyse, supervision et contrle. Raliser les connexions suivantes : Relier 10 8 Mettre switch METER sur RTD-TH, switch RTD sur ON, switch ICOOLER sur AUT Connexion entre module et MFI-U 28-Analog IN0, 11-Analog OUT0, GND-GND Parameters PID: P=10, I=1, D=1
33
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
TP4 : Commande de vitesse et de position
Partie thorique
1.1 Prsentation du systme Le systme se compose dun moteur courant continu TY36A/EV et du module G36A/EV
qui assure la commande de ce moteur.
Le module G36A/EV se compose de diffrents blocs parmi eux :
PWM & Power Amplifier : Bloc qui amplifie la puissance du signal provenant du SET POINT : Fournie la consigne du systme ERROR AMPLIFIER 1/2 : Effectue le calcul entre la valeur dentre et la valeur de CURRENT LIMIT : Limite le courant qui alimente le moteur. PID CONTROLLER : Bloc qui reprsente le correcteur PID.
34
Dp. Gnie Electronique
correcteur PID pour faire fonctionner lactionneur (moteur).
sortie donnant naissance a lerreur du systme.
RHIF Ahmed
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
POTENTIOMETER CONDITIONER : Capteur de position du moteur. TACHO-Gen CCONDITIONER : Capteur de la vitesse angulaire du moteur. SPEED DETECTOR : Capteur de vitesse du moteur.
1.1.1 Caractristiques du moteur courant continu Un moteur courant continu (MCC), dont le schma de principe est donn la figure -1-, est
un dispositif lectromcanique qui convertit une nergie lectrique dentre en nergie mcanique. Lnergie lectrique est apporte par un convertisseur de puissance qui alimente le bobinage dispos sur linduit mobile (rotor) grce un dispositif adapt (balais et collecteur). Le bobinage rotorique est plac dans un champ magntique, permanent ou non, d au stator. Dans notre cas cette excitation est spare et constante, comme cest souvent le cas. Le courant circulant dans les spires de linduit du moteur, des forces lectriques lui sont appliques et, grce au dispositif balais/collecteur, ces forces sadditionnent pour participer la rotation.
Figure 1 Principe de fonctionnement dun moteur courant continu
Quand le moteur tourne, il produit une force lectromotrice dirige en sens inverse de la
tension applique ses bornes, do le nom de force contre lectromotrice FCEM. E' = P Nn a
p/a : nombre de paires de ples sur nombre de paires de voies denroulement de linduit. N : Nombre de conducteurs priphriques sur linduit. n : Vitesse de rotation de linduit en tr/s
: Flux de linducteur en webers.
35
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
La force contre-lectromotrice dun moteur est proportionnelle la vitesse n de linduit. Quand on applique la tension U du rseau aux bornes du moteur celui-ci tant au repos
A vide elle est voisine de la tension U applique ses bornes. ne dveloppe aucune force contre-lectromotrice.
E=0
car : Si on met en marche un tel moteur sans dispositif de dmarrage, le courant absorb sera trs grand et risque de faire fondre les fusibles de protection ou de dclencher le disjoncteur,
I=U/r (ampres).
U = tension aux bornes de linduit ; r = rsistance de linduit (est trs faible). Pour limiter lintensit au dpart, il est indispensable dinsrer un rhostat de dmarrage en srie avec linduit. On a alors :
I=U/(r+r) (ampres).
r = rsistance du rhostat de dmarrage. Quand le moteur est lanc, la force contre-lectromotrice du moteur permet de supprimer progressivement les rsistances du rhostat, lintensit a alors pour valeur :
I=(U-E)/r (ampres). 1.1.2 La modlisation du systme Le systme tudi est constitu d'un moteur lectrique courant continu excitation spare
entranant une charge. Le capteur utilis pour mesurer la position de la charge est un encodeur optique.
Rgulateur de courant
Consigne de Vitesse +
Rgulateur
de vitesse
Correcteur + Amplificateur de puissance
Courant
Moteur
Vitesse
Charge
Figure 2 Schma fonctionnel du systme
Le systme schmatis par la figure 3.2 est caractris par les paramtres suivants : Linductance: L Linertie: J 36
RHIF Ahmed Dp. Gnie Electronique
Le frottement : f
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
La rsistance : R
Figure 3 Schma dun moteur courant continu
Mise en quation du systme :
Le systme est reprsent par les quations diffrentielles suivantes :
u (t ) = e(t ) + Ri (t ) + L
di (t ) dt d (t ) c m (t ) c r (t ) = f (t ) + j dt c m (t ) = k1i (t ) e(t ) = k 2 (t )
(3.5)
k1 et k2 sont des constantes de conversion. Pour dterminer la fonction de transfert du systme, on applique la transforme de Laplace, ce qui donne :
U (t ) = E ( s ) + RI ( s ) + LsI ( s ) C m ( s ) C r ( s ) = F( s ) + Js( s ) C m ( s) = K1 I (s ) E ( s ) = K 2 ( s ) Ces quations traduisent le schma bloc de la figure 3.3. On pourra conclure la fonction de transfert (3.7) et le modle dtat (3.9). Lexemple considr prsente : k1 = k2 = k
(s ) = k R + Ls U (s ) Cr ( s ) 2 2 Rf + k + ( RJ + Lf ) s + LJs Rf + k + ( RJ + Lf ) s + LJs 2
2
(3.6)
(3.7)
Si lon met ces quations sous forme de schma, on aboutit la figure.
37
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Cr(s) U (s ) + -
1 R + Ls
k1
(s)
1 Js + f
k2
Figure 4 Schma Bloc dun Moteur courant continu
2 2.1
Partie exprimentale Contrle automatique de vitesse
2.1.1 Contrle de vitesse en boucle ouverte Ralisant le circuit suivant :
Relier 3 29, 26 27 Tourner la poigne du frein mcanique pour avoir une charge nulle. Faite varier la consigne et relever la valeur de la vitesse visualise sur lafficheur du DIGITAL RPM METER. 1) Reprsenter par schma bloc le circuit ralis puis remplir le tableau 1 sachant que lchelle de la consigne : 1div=660tr/min
Tension
0 1 2 3 4 5 6 7 8
T/min
Erreur Thorique
Tab1. Systme en boucle ouverte
38
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
2) Tracer la courbe correspondante vitesse= f (tension). Conclure. 3) Appliquer une charge considrable, en utilisant la poigne du frein (attention ne pas bloquer le moteur).Refaire les mmes mesures que pour la charge nulle et tracer la nouvelle courbe. 4) Comparez les deux tracs et interprter le rsultat.
2.1.2 Contrle de vitesse en boucle ferme Relier les bornes suivantes : 3 5, 6 10, 11 12, 13 14, 15 16, 17 18, 4 23, 29
30, 26 27. Etablir une valeur de charge nulle Mettre les boutons PROPORTIONAL et DERIVATIVE sur valeur maximale et INTEGRATIVE sur valeur minimale. 1) Reprsenter par schma bloc le circuit ralis. 2) Remplir le tableau 2.
Tension
0 1 2 3 4 5 6 7 8
Tr/min
Erreur
Tab2.Assrvissement de vitesse en boucle ferme
3) Tracer la courbe correspondante vitesse= f (tension). Conclure. 4) Appliquer une charge considrable, en utilisant la poigne du frein (attention ne pas bloquer le moteur). Refaire les mmes mesures que pour la charge nulle et tracer la nouvelle courbe. Comparez les deux tracs.
2.1.3 Contrle de vitesse en boucle ferme : effet des diverses composantes du contrleur PID Refaire les mmes connexions de lexercice prcdent
39
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Insrer uniquement laction proportionnelle et la mettre sur la valeur minimale. Appliquer une tension de 4V (consigne) et mesurer lerreur du systme (la tension de sortie borne 6).
1) Mettre PROPORTIONAL sur valeur maximale et mesurer lerreur du systme. 2) Dduire leffet de laction proportionnelle. 3) Insrer laction INTEGRALE (relier 13 et 14) et la mettre a valeur minimale. Ensuite mesurer lerreur. 4) Mettre INTERGRATIVE la moiti et PROPORTIONAL au minimum et on mesure lerreur. Dduire leffet de laction intgrale. 5) Introduisez laction driv sur la valeur minimale puis maximale et mesurer lerreur. Conclure.
2.1.4 Module MFI-U/EV Cette unit dinterface industrielle permet de transformer nimporte quel ordinateur en un
quipement de type industriel pour des applications dacquisition de donnes, analyse, supervision et contrle. Connexion sur le module : 26-27, 29-30 Connexion entre module et MFI-U : 23-Analog IN0, 18-Analog OUT0, GND-GND Parameters PID: P=1, I=1, D=10
2.2 Contrle automatique de position Relier les bornes suivantes : 3 5, 4 21, 6 8, 7 23, 9 10, 11 12, 13 14, 15 16,
17 18 29 30, 26 27. Appliquer une charge nulle. Mettre les boutons PROPORTIONAL sur valeur maximale et INTEGRATIVE sur valeur minimale. Fournir une tension de 0V et relever la valeur de la position, en degr, visualise sur lindicateur plac sur lunit extrieure TY36A. 1) Reprsenter par schma bloc le circuit ralis. 2) Remplir le tableau 3
40
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Signal de rfrence
0 1 2 3 4 5 6 7 8
Position angulaire
Erreur thorique
Tab3. Asservissement de position en boucle ferme
3) Tracer la courbe correspondante Position angulaire= f (Signal de rfrence) 4) Reporter le signal de rfrence 0V, appliquer une charge laide du frein et refaire le mme travail. Comparer les rsultats obtenus.
2.2.1 Contrle automatique de position : effet des diverses composantes du contrleur PID Sur le mme circuit prcdent, liminer la charge causer par le frein.
1) Insrer uniquement laction proportionnelle, appliquer la consigne une tension de 4V et mesurer lerreur du systme borne 6 (sortie de lamplificateur derreur). 2) Mettre PROPORTIONAL sur la valeur maximale et mesurer lerreur du systme. 3) Insrer laction INTEGRATIVE (relier 13 et 14) et la mettre a valeur minimale avec laction proportionnelle sur valeur minimale. Ensuite mesurer lerreur. 4) Mettre INTERGRATIVE la moiti et PROPORTIONAL au minimum et on mesure lerreur. Dduire leffet de laction intgrale. Introduisez laction driv, refaire de mme que pour lintgrale. Conclure.
2.2.2 Module MFI-U/EV Cette unit dinterface industrielle permet de transformer nimporte quel ordinateur en un
quipement de type industriel pour des applications dacquisition de donnes, analyse, supervision et contrle. Connexion sur le module : 26-27, 29-30 Connexion entre module et MFI-U : 21-Analog IN0, 23-Analog IN1, 18-Analog OUT0, GND-GND Parameters PID: P=1, I=1, D=10 41
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
TP5 : Simulateur de processus
Partie thorique
1.1 Prsentation du systme Le simulateur de processus est une maquette qui sert simuler plusieurs types de systmes en
utilisant leurs fonctions de transfert (modle mathmatique).
42
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Les fonctions principales prsentes par la maquette sont :
PROCESS : Ce bloc reprsente le processus sur lequel on va travailler. La fonction de
transfert correspondante, dans chaque bloc part peut tre sous deux formes diffrentes : si on met linterrupteur sur INTEG linterrupteur sur LAG H(P)= k/(s+) H(P) = k/s et si on met
SET POINT : Fournie la consigne du systme PID CONTROLLER : Bloc qui reprsente le correcteur PID. VOLTAGE/CURRENT CONVERTER UNIT : Bloc qui sert convertir la tension SET DISTURBANCE SIGNAL : Ce bloc sert appliquer au systme un signal de NONLINEAR UNIT : laide de ce bloc on peut concevoir un systme non linaire. RESET UNIT : Remet le systme zros.
en un courant.
perturbation qui peut tre aussi sous forme dimpulsion.
1.2
Outils a utiliss Multimtre
Oscilloscope
2 Partie exprimentale 2.1 Simulation du systme changeur de chaleur Le systme quon va tudier dans cette section est un changeur de chaleur qui peut tre
simul, par un modle simplifi, avec cette maquette par le cblage suivant : Relier les bornes suivantes : 29-24, 23-20 avec linterrupteur sur LAG. La borne 34 prsente Vc = (1/10) Tc : la sortie contrle. La borne 27 prsente Vd = (1/10) Td 1) Donner la fonction de transfert du systme tudier.
2.1.1 Rglage manuel boucle ouverte Le rglage consiste dans le rchauffement du fluide gazeux une temprature constante de
faon que la temprature du fluide prenne la valeur dsire.
But de lexercice
Maintenir la temprature du liquide 40C (Vc=4V) avec une temprature du fluide gazeux comprise entre -80C (-8V) et +80C (+8V)
43
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Exprience
Brancher la borne 1 2 et 36, mettre le commutateur de RESET sur OFF. Brancher 7 8. Mettre le commutateur oprationnel sur SLOW Relier 14 18 Brancher le voltmtre et loscilloscope sur 34
1) Reprsenter laide de schma bloc la boucle dasservissement du systme cbl. 2) En agissant brusquement sur la valeur du signal de rfrence puis dterminer, sur loscilloscope, le retard produit par le processus. 3) Faite varier le gain Kp et remplir le tableau 1. Interprter, dduire le rle du gain Kp. 4) Appliquer un signal Vd (+/- 2V) la borne 17, reprendre la table 1. Commenter linfluence de ce signal.
Signal de rfrence Vsp(V)
Amplification Kp
0.4
Sortie contrl Vc(V)
Tab1. Effet du gain Kp sur le systme
2.1.2 Asservissement en boucle ferme : rglage automatique de type proportionnel (P) But de lexercice
Dterminer lerreur (la diffrence entre la grandeur contrle et le signal de rfrence) lorsquon atteint le rgime permanant.
Exprience
Brancher la borne 1 2 et 36, mettre le commutateur de RESET sur OFF. Brancher 7 8 et mettre Kp sur la valeur 0.4. 44
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Mettre le commutateur oprationnel sur SLOW Relier 14 18, 34 35.
1) Reprsenter la boucle dasservissement laide du schma bloc. 2) Fixer la valeur du signal de rfrence 4V et remplir le tableau 2.
Signal de rfrence Vsp(V)
Amplification Kp
Sortie contrl Vc(V)
Erreur effective (Vsp-Vc)/Vsp
Erreur thorique en R.P 1/(1+Kp)
0.4
Tab2. Effet de laction proportionnelle Kp sur le systme
3) Mettre Kp sur 40, appliquer un signal Vd (+/- 8V) de la borne 6 la borne 17. Refaire la table 2 puis commenter linfluence de ce signal.
2.1.3 Rglage automatique de type proportionnel intgral driv (PID) en boucle ferme Utiliser le mme branchement prcdent puis :
Brancher 24 25, 26 29 avec les deux interrupteurs sur LAG. Dbrancher 7 et 8 et brancher 9 10.
1) Donner la nouvelle fonction de transfert tudier. Visualiser la sortie du systme sur loscilloscope, faite varier i et commenter, interprter le rsultat. (Rq.Vous pouvez changer la position du commutateur oprationnel sur SLOW/FAST pour mieux observer).
Brancher la borne 1 2 et 36, mettre le commutateur de RESET sur OFF. Brancher 7 8, mettre Kp sur la valeur 4 et i au minimum. Mettre le commutateur oprationnel sur SLOW
2) Fixer la valeur du signal de rfrence sur 4V. Vrifier que la valeur contrle concide avec le signal de rfrence (utiliser curseur sur loscilloscope). 45
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
3) Dbrancher la borne 9 et commenter le rsultat. 4) Rebrancher la borne 9, dbrancher 7 et 8 et brancher 11 12. Faite varier d et commenter. Conclure leffet de laction drive.
2.2 Simulation du systme positionneur Le systme positionneur peut tre simul avec cette maquette par le cblage suivant :
Relier 29 28, 27 26, 25 24, 23 20. Mettre les deux premiers interrupteurs sur LAG et le dernier sur INTEG. 1) Donner la nouvelle fonction de transfert H(P).
2.2.1 Prparation dun rgulateur PID selon Ziegler Nichols
La dtermination des paramtres du PID Kp, i et d par la mthode de Ziegler Nichols se base sur le comportement la limite de stabilit de tout le systme contre-ractionn.
Exprience
Brancher la borne 1 2 et 36, mettre le commutateur de RESET sur OFF. Brancher 7 8, mettre Kp sur la valeur 0.4. Mettre le commutateur oprationnel de la vitesse sur FAST Relier 14 18, 34 35. Brancher le voltmtre et loscilloscope (voie B) sur 34 Fixer la valeur du signal de rfrence sur 4V
1) Augmenter Kp jusqu le systme oscille (Kpl : limite) et remplir le tableau 3.
Kpl
Tl
Kp = 0.6 Kpl
i =0.5 Tl
i =0.12 Tl
Tab3. Les paramtre du PID suivant Ziegler&Nichols
2) Relier 9 10 et 11 12. Remplir la table 4. Vrifier la stabilit du systme en variant manuellement la tension du signal de rfrence. 3) Mettre Set/ Disturbance signal sur 2 V et Manuel. Reprsenter la boucle dasservissement laide du schma bloc. Vrifier la stabilit du systme en envoyant le
46
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
signal de perturbation Vd de la douille 4 vers le signal load disturbance borne 33. Donner la conclusion vis--vis la robustesse du rgulateur PID.
Signal de Amplification rfrence Vsp(V) Kp
Gain i
Gain d
Sortie contrl Vc(V)
Erreur effective (Vsp-Vc)/Vsp
Tab4. Effet du correcteur PID
47
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
TP 6 Simulation des systmes continus et discrets
Introduction Simulink est l'extension graphique de MATLAB permettant de reprsenter les fonctions
mathmatiques et les systmes sous forme de diagramme en blocs, et de simuler le fonctionnement de ces systmes. Sur simulink on peut travailler sur des systmes continus ou discrets.
1 Un Avant Got
Voici une simulation de contrle de vol dun missile ou dun avion asservis en vitesse et en
position pour atteindre une cible bien dfinie.
Figure 1 Missile dun avion
48
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
1.
Lancer Matlab load_system(aerospace) open_system(aero_guidance)
2. Tapez les commandes suivantes dans la fentre Command Window :
3. Dans la fentre aero-guidance : Simulation ==> Start 4. La figure 1 apparait Animation figure qui trace le vol en temps rel. La figure 2 : Affiche les paramtres : Acclration normale, Nombre de Mach, incidence et contrle fin. La figure 3 : Angle de vraie vue et langle de Gimbal. La figure 4 : Montre le graphe altitude et position.
Pour dmarrer Simulink :
Dans la fentre Commande de MATLAB, taper simulink ou cliquer directement sur le raccourci simulink. Cette fentre contient des collections de blocs que l'on peut ouvrir en cliquant (double) dessus.
49
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Sources
Sources de signaux
Sinks Blocs daffichage (oscilloscope)
Discrete Continuous
Blocs discrets des systmes discrets Blocs des systmes continus (fonctions de transferts, fonction drive, fonction intgrale). Blocs des oprations mathmatiques (sommateur, comparateur, gain)
Math opration
Simulation des systmes continus
Exercice 1 : Simulation dun systme de premier ordre simplifi
Ouvrir une nouvelle page dans simulink et raliser la boucle dasservissement ci-dessous pour le systme de premier ordre H ( p ) = 1 . p +1
50
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Pour voir les figure faite double cliques sur le bloc scope ou taper dans la page commande de matlab : plot (t,S). Changer le paramtre Stop time par 30 au lieu de 10 (voir figure ci-dessous).
1) Interprter le rsultat trouv. Dite si nous avons besoin de passer lasservissement en boucle ferme. 2) Remplacer la fonction prcdente par H ( p ) = interprter le rsultat. 1 . Refaire le mme travail et 2p + 2
Exercice 2:
Pilotage automatique dun avion : maintien daltitude AIRBUS A340
Objectifs pdagogiques:
Etude de prcision dun systme ; Etude des correcteurs : Proportionnel ; Intgral, Proportionnel Intgral, Proportionnel Driv, Proportionnel Intgral Driv. 51
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Prsentation
Le schma bloc ci-dessous reprsente lasservissement daltitude dun avion de type AIRBUS A340. Lavion vole en palier une altitude Z0.
Nom des variables:
Zc : Altitude de consigne par rapport laltitude initiale Z0 Z ou Zs : Altitude relle de lavion par rapport laltitude initiale Z0. Cette altitude est mesure par un capteur (sonde altimtrique de pression) dont la constante de temps est ngligeable devant le temps de rponse de lavion. Ez : Ecart daltitude Zc - Z Azc : Acclration verticale de consigne Az : Acclration verticale relle de lavion Vz : Vitesse verticale de lavion
Nom et fonction des diffrents blocs:
bloc dentre Zc: la consigne lentre du pilote automatique est un changement daltitude de type chelon bloc correcteur Cor: bloc dont on cherche la Fonction de transfert N(p)/D(p), de faon rendre le systme stable avec la meilleure prcision possible. bloc avion Av: ce bloc reprsente la Fonction de transfert du mouvement de lavion stabilis Lavion est modlis par un systme du 2e ordre : H ( p ) = 1 0.444 p + 1.066 p + 1
2
bloc intgrateur Int1: ce bloc ralise lintgration qui permet de passer de lacclration verticale Az la vitesse verticale Vz. bloc intgrateur Int2: ce bloc ralise lintgration qui permet de passer de la vitesse verticale Vz laltitude Z bloc Zs: bloc de sortie (Zs = Z) ncessaire au bon fonctionnement du logiciel
52
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Remarque :
Lavion est ici command en acclration verticale ce qui permet davoir des modes de pilotage automatique trs varis tels que maintien dune altitude affiche (cest le cas de lexercice) maintien dune vitesse verticale (lentre serait une rampe) maintien dune pente de monte ou de descente monte vitesse optimale (dun point de vue consommation de carburant)
La combinaison de plusieurs de ces modes de pilotage permet de raliser des fonctions plus complexes telles que lapproche automatique du terrain datterrissage, atterrissage automatique et, si ncessaire, remise des gaz automatique.
Abrviations:
FT = Fonction de Transfert FTBO = Fonction de Transfert en Boucle Ouverte FTBF = Fonction de Transfert en Boucle Ferme
OBJECTIFS DE LETUDE
Raliser la boucle dasservissement (figure ci-dessous) sur Simulink, puis dterminer les valeurs numriques de la FT du correcteur qui permettra dobtenir un systme stable dans toutes les configurations (cest dire avec suffisamment de marge) et qui sera le plus prcis possible avec une rapidit de rponse adquate.
53
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
3 Simulation des systmes discrets Un systme discret est une entit qui ralise la conversion d'une suite discrte {x(n)} en entre
en une autre suite discrte {y(n)} en sortie. Un tel systme met des signaux discrets aux instants t n = nT multiples de la priode dchantillonnage T en rponse aux signaux discrets mesurs lentre aux mmes instants. La transforme en Z X z ( z ) de la squence {x(n.Te )} , dduite de x(t )
Remarque : Par abus de langage, on crit souvent X z (z ) =
notation
Z {x(t )}
notation
Z X p ( p)
La transforme en Z modifie X m ( z ) = Tr en Z de la squence {x(n.Te [1 m].Te )} , dduite de x(t [1 m].Te ) .
Remarque :
Avec les notations prcdentes, on a : X m ( z ) =
notation
Z {x(t [1 m].Te )}
notation
Z e [1 m ].Te . p . X p ( p )
3.1 Discrtisation dun processus command travers un bloqueur dordre zros
Un ordinateur qui pilote un processus continu applique un signal de commande bloqu (constant par morceaux) sur lentre u( t ) et ne connat la sortie s( t ) quaux instants dchantillonnage. Compte tenu de quoi, il est possible de calculer partir de lquation diffrentielle du processus la relation entre les u(nT) et les s(nT) sous la forme dune quation aux diffrences : cette opration porte le nom de discrtisation, et remplace le processus continu de fonction de transfert C(p) par un processus discret D(z) quivalent aux instants dchantillonnage. 1 e Tp Avec B0 ( p) = . p
u B ( nT t < ( n + 1)T ) = u( nT ) u( nT ) BOZ Processus continu C(p) s( t ) s( nT ) mesure
u( nT )
Processus discrtis D(z)
s( nT )
54
RHIF Ahmed Dp. Gnie Electronique
Travaux Pratiques Asservissement et Rgulation
ISSATSO 2011
Transmittance G(p) On en dduit :
G0 ( p ) = B0 ( p ) G ( p )
On calcule la transmittance discrte :
Echantillonneur bloqueur
G ( z ) = Z {B0 ( p ) G ( p )} Transforme bilinaire Passage dans le domaine pseudo-continu : G0(w) Calcul du correcteur C(w) en utilisant les mme mthodes quen continu. Transforme bilinaire On en dduit C(z ) Implantation du correcteur partir des coefficients de C(z-1)
-1
3.2 Simulation dun moteur de premier ordre en mode discret
Dans cette partie dtude nous allons considrer un moteur de premier ordre H ( p ) = 1 . 1 + p 1) Calculer la fonction globale du systme en mode discret (noublier pas de considrer un retard e Tp ). 2) raliser la simulation, laide de simulink, du systme en insrant un correcteur numrique D(z) comme lindique la figure ci-dessous.
3) comparer entre les deux modes discret et continu.
55
RHIF Ahmed Dp. Gnie Electronique
Вам также может понравиться
- Asservissement de Position Et de Vitesse D'une Articulation RobotiqueДокумент23 страницыAsservissement de Position Et de Vitesse D'une Articulation RobotiqueHachemi Bhe100% (9)
- Regulation de Vitesse MCCДокумент10 страницRegulation de Vitesse MCCMohamed Bou100% (1)
- TP AutomatiqueДокумент54 страницыTP Automatiquedjnabilos88% (8)
- Cours Régulation IndustrielleДокумент58 страницCours Régulation IndustrielleBakir Fatma95% (21)
- Rapport AutomatiqueДокумент15 страницRapport AutomatiqueMariam SajidОценок пока нет
- Régulation PIDДокумент33 страницыRégulation PIDRoboCEPT80% (5)
- Livre Asservissement LineaireДокумент289 страницLivre Asservissement LineaireSamir Sayah50% (6)
- Cours Asservissement MPДокумент56 страницCours Asservissement MPArbaoui Mohamed86% (7)
- Simulation Des Correcteurs PIDДокумент61 страницаSimulation Des Correcteurs PIDHachemi Bhe82% (22)
- TD Asservissement m1 Spi-GmaДокумент48 страницTD Asservissement m1 Spi-Gmamechernene_aek90370% (1)
- Cours AsservissementДокумент85 страницCours AsservissementHamdi Makni67% (3)
- Bases Regulateur PIDДокумент30 страницBases Regulateur PIDOmar Ayadi100% (1)
- Notes de Cours Capteurs Et Actionneurs PDFДокумент264 страницыNotes de Cours Capteurs Et Actionneurs PDFJalel Khediri100% (1)
- Cours Commande 2009 2010Документ150 страницCours Commande 2009 2010Kiriku Eta Basapiztiak100% (3)
- Commande Optimale PDFДокумент47 страницCommande Optimale PDFصليحة احمد0% (1)
- Cours CompletДокумент162 страницыCours CompletMohamed Ferchichi100% (1)
- Application de La Logique Floue R Gulation de VitesseДокумент16 страницApplication de La Logique Floue R Gulation de Vitessenadir kali411Оценок пока нет
- Le Grafcet Et Les Modes de MarchesДокумент14 страницLe Grafcet Et Les Modes de Marchespierrejudej8607Оценок пока нет
- Régulation Industrielle-Chapitre 3-2017-1-BF (Mode de Compatibilité)Документ25 страницRégulation Industrielle-Chapitre 3-2017-1-BF (Mode de Compatibilité)amine milano100% (2)
- Cours de Systemes AsservisДокумент82 страницыCours de Systemes Asserviselectroblida86% (7)
- Cours AsservissementДокумент4 страницыCours AsservissementOmar ChОценок пока нет
- Asservissement Et Regulation PDFДокумент58 страницAsservissement Et Regulation PDFshah shakeel rssОценок пока нет
- TD Corriges Asservissement Et RegulationДокумент61 страницаTD Corriges Asservissement Et RegulationLamine Mossadak88% (41)
- Amplificateurs OpérationnelsДокумент30 страницAmplificateurs OpérationnelsNGAMIJEОценок пока нет
- Regulation CoursДокумент106 страницRegulation CoursRiadh Majd100% (4)
- Cours Régulation Asservissement I IIДокумент217 страницCours Régulation Asservissement I IIcaptain dona0% (1)
- Régulation AnalogiqueДокумент41 страницаRégulation Analogiquefouad100% (1)
- Cours - Organes D'asservissementДокумент71 страницаCours - Organes D'asservissementDaniele NephtysОценок пока нет
- Régulation AutomatiqueДокумент25 страницRégulation AutomatiquenabilОценок пока нет
- Compte Rendu-MoteurДокумент7 страницCompte Rendu-MoteurAmine CheurfaОценок пока нет
- Cours STS2 05 Regulation Et AsservissementДокумент36 страницCours STS2 05 Regulation Et AsservissementYassine AttachОценок пока нет
- TpAsserv 2015Документ35 страницTpAsserv 2015Ahmed Msf100% (6)
- Introduction À La RégulationДокумент8 страницIntroduction À La RégulationChakib Ka100% (2)
- Auro1b1 TDДокумент2 страницыAuro1b1 TDNabil EL KassoumiОценок пока нет
- 200 Systemes AsservisДокумент9 страниц200 Systemes AsservistarekocpОценок пока нет
- TD Système Ordre 1 PDFДокумент5 страницTD Système Ordre 1 PDFJribi TalelОценок пока нет
- Cours RegulationДокумент121 страницаCours RegulationKouakou Joseph N' Guessan75% (4)
- Cour Capteurs Et TransmetteulmmmmrsДокумент511 страницCour Capteurs Et TransmetteulmmmmrsFox Ben100% (2)
- Cours Régulation 2021Документ107 страницCours Régulation 2021Marwa CharaouiОценок пока нет
- Identification 2Документ30 страницIdentification 2ssssОценок пока нет
- Automatique 1 Signaux Et Systèmes Continus Et ÉchantillonnésДокумент96 страницAutomatique 1 Signaux Et Systèmes Continus Et Échantillonnésfekielyes100% (3)
- Automatique AvanceeДокумент9 страницAutomatique AvanceeimadОценок пока нет
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОт EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОценок пока нет
- Automatique Lineaire Asservissement Regulation PDFДокумент55 страницAutomatique Lineaire Asservissement Regulation PDFMohamed Benrahal100% (1)
- Chap 3Документ10 страницChap 3mohamedmessahel754Оценок пока нет
- Cha 1.Документ16 страницCha 1.Khalid Lahouar100% (1)
- Régulation Et Instrumentation1Документ11 страницRégulation Et Instrumentation1Mohammed SalahОценок пока нет
- Exposé AutomatiqueДокумент25 страницExposé AutomatiqueExode Christ GuielleОценок пока нет
- Cours Technologie Régulateurs M1Документ28 страницCours Technologie Régulateurs M1Joseph Amond100% (1)
- 2 Structure PidДокумент7 страниц2 Structure PidBoukari Abdoulaye IdrissaОценок пока нет
- Future ArchitictureДокумент16 страницFuture ArchitictureMaamar ElomariОценок пока нет
- M2 INST Elem - Reg NumДокумент6 страницM2 INST Elem - Reg NumMehdi LaserОценок пока нет
- Asservissement PID: Table Des MatièresДокумент11 страницAsservissement PID: Table Des MatièressalmaОценок пока нет
- TP Eyadridi, NawresbenismailДокумент4 страницыTP Eyadridi, NawresbenismailZouhair DridiОценок пока нет
- Conference Proceedings - EGCI'2018 (Anglophone Issue)Документ105 страницConference Proceedings - EGCI'2018 (Anglophone Issue)Ahmed RhifОценок пока нет
- Conference Proceedings - EGCI'2018 (Francophone Issue)Документ747 страницConference Proceedings - EGCI'2018 (Francophone Issue)Ahmed RhifОценок пока нет
- Commande Stabilisante Par Mode Glissant de Niveau Et de Débit Pour Un Double RéservoirsДокумент13 страницCommande Stabilisante Par Mode Glissant de Niveau Et de Débit Pour Un Double RéservoirsAhmed Rhif100% (1)
- TP Traitement de Signal (Acoustique Et Traitement Du Son) : Application Sur MatlabДокумент26 страницTP Traitement de Signal (Acoustique Et Traitement Du Son) : Application Sur MatlabAhmed Rhif82% (11)
- Traitement de Signal Acoustique (Cours Et Applications)Документ52 страницыTraitement de Signal Acoustique (Cours Et Applications)Ahmed Rhif83% (6)
- Cours de InfoДокумент12 страницCours de InfoAmar AlicheОценок пока нет
- Equivalence NF en Notes Techniques Et Formulaires - NormathequeДокумент1 страницаEquivalence NF en Notes Techniques Et Formulaires - NormathequefelkamalОценок пока нет
- Maintennace Informatique 10sur30Документ12 страницMaintennace Informatique 10sur30FOUAD EL BRAHMI100% (1)
- Ilovepdf Merged 2Документ121 страницаIlovepdf Merged 2sarray rawdhaОценок пока нет
- Recépteur Triphasé DesequilibreДокумент3 страницыRecépteur Triphasé Desequilibreayoumaaoui5Оценок пока нет
- 311C 00 Cover 20060728Документ2 страницы311C 00 Cover 20060728Rakesh KongalaОценок пока нет
- A I Ac Exam Final Ligne Set An TennesДокумент2 страницыA I Ac Exam Final Ligne Set An TennesYassine AourhanОценок пока нет
- Cours MP TDTS PDFДокумент39 страницCours MP TDTS PDFTRAOREОценок пока нет
- Microprocesseurs Et APIДокумент22 страницыMicroprocesseurs Et APISa rahОценок пока нет
- Communication MostaghanemДокумент6 страницCommunication Mostaghanemsoumia DIDOUHОценок пока нет
- Liste r01 02 4 D GBДокумент1 страницаListe r01 02 4 D GBsmchakОценок пока нет
- N57 & N58 - Manuel D'installation - FR - Du 20 10 99 (7686)Документ14 страницN57 & N58 - Manuel D'installation - FR - Du 20 10 99 (7686)younesОценок пока нет
- Td+correction EnpuДокумент27 страницTd+correction EnpuChristian100% (1)
- TD1 Enoncé PDFДокумент8 страницTD1 Enoncé PDFAhmed LakhalОценок пока нет
- TD02 Les Chaines FonctionnellesДокумент7 страницTD02 Les Chaines FonctionnellesPOU DannyОценок пока нет
- XR01 02CX FRДокумент3 страницыXR01 02CX FRKamel IfrahОценок пока нет
- Meta Max 2087aДокумент6 страницMeta Max 2087asiricoОценок пока нет
- CF2 CorrigeДокумент5 страницCF2 CorrigeHermosa MorenaОценок пока нет
- CH 6 GradateurДокумент9 страницCH 6 Gradateurcharletb toubia100% (1)
- TD2 AssembleurДокумент3 страницыTD2 AssembleurZayneb TekarriОценок пока нет
- Capteur Numérique À Fibre Optique: Série FS-NДокумент28 страницCapteur Numérique À Fibre Optique: Série FS-NAmine HelailiОценок пока нет
- Bipolaire Cours - Impression - MASSON PDFДокумент32 страницыBipolaire Cours - Impression - MASSON PDFJimmy RostantОценок пока нет
- EP08150369NWA1Документ16 страницEP08150369NWA1Omar SelamiОценок пока нет
- Hitachi l200 FRДокумент2 страницыHitachi l200 FRHaddouОценок пока нет
- TP 1 Mesure Impã©danceДокумент7 страницTP 1 Mesure Impã©danceNesma Mehassouel100% (1)
- Blocs Logiques de Securite EleveДокумент8 страницBlocs Logiques de Securite EleveyohanОценок пока нет
- Exercice 1 Une Quantite Delectricite Q 23 C Passe en Un Point DДокумент2 страницыExercice 1 Une Quantite Delectricite Q 23 C Passe en Un Point DHadhri HadhriОценок пока нет
- Pfe EnimДокумент32 страницыPfe EnimMohamed Radhouane50% (2)
- Exercices Physique L'électricité Version 2Документ5 страницExercices Physique L'électricité Version 2Wagner ClémentОценок пока нет
- Electronique PuissanceДокумент98 страницElectronique Puissanceyassin akkninnОценок пока нет