Вам также может понравиться
- Exercices d'intégrales de lignes, de surfaces et de volumesОт EverandExercices d'intégrales de lignes, de surfaces et de volumesОценок пока нет
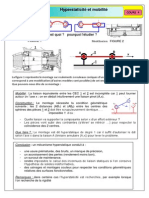
- Chap3 Hyperstatisme Et Mobilité Des MécanismesДокумент21 страницаChap3 Hyperstatisme Et Mobilité Des Mécanismesmamadou diopОценок пока нет
- Cours Hyperstatique TempoДокумент5 страницCours Hyperstatique TempoSCORSAM1Оценок пока нет
- Chapitre III - Mobilité Et Hyperstatisme Partie 3Документ3 страницыChapitre III - Mobilité Et Hyperstatisme Partie 3Lamia OhrcheОценок пока нет
- Equilibrage DynamiqueДокумент3 страницыEquilibrage DynamiqueMahran GuesmiОценок пока нет
- Cours Theorie MecanismeДокумент15 страницCours Theorie Mecanismemaraghni_hassine7592Оценок пока нет
- TD-théories Des Mécanismes-Mr MOUNIR 2022-23 PDFДокумент49 страницTD-théories Des Mécanismes-Mr MOUNIR 2022-23 PDFmukoОценок пока нет
- Cours Theorie Des Mecanismes PDFДокумент12 страницCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- 05 Poly-Cinetique-Dynamique MP PSI PT-2 2Документ24 страницы05 Poly-Cinetique-Dynamique MP PSI PT-2 2kamalОценок пока нет
- 32 Fermeture Geo ExercicesДокумент4 страницы32 Fermeture Geo Exerciceslaalai faicelОценок пока нет
- DS2 SiiДокумент8 страницDS2 SiiAHMED ghribiОценок пока нет
- Matrice D'inertieДокумент4 страницыMatrice D'inertieJean AbelaОценок пока нет
- Liaisons Equival TDДокумент18 страницLiaisons Equival TDAyou HamОценок пока нет
- DynamiqueДокумент4 страницыDynamiqueammarОценок пока нет
- Chaines de Solides - Comportement CinématiqueДокумент8 страницChaines de Solides - Comportement CinématiqueAbdelali YacoubiОценок пока нет
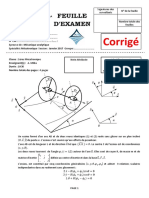
- Examen Jan 2017-CorrigéДокумент3 страницыExamen Jan 2017-Corrigéyasahiro 10Оценок пока нет
- 1agm 2019-2020 PDFДокумент11 страниц1agm 2019-2020 PDFAhmed AhmedОценок пока нет
- TpChaineSolides CorrigéДокумент9 страницTpChaineSolides CorrigéImen HammoudaОценок пока нет
- Cours Analyse Des MecanismesДокумент10 страницCours Analyse Des MecanismesNeoXana01Оценок пока нет
- Cinématique Des Systèmes - Cinématique Des Mécaniques PDFДокумент16 страницCinématique Des Systèmes - Cinématique Des Mécaniques PDFAlaealeaОценок пока нет
- TD 10 - Comportement Cinématique Des SystèmesДокумент4 страницыTD 10 - Comportement Cinématique Des Systèmesbhs channelОценок пока нет
- Ex 15 16Документ18 страницEx 15 16Sd instruОценок пока нет
- DS4 SujetДокумент8 страницDS4 SujetPierre BeckОценок пока нет
- (RDM) (CO) Resistance Des Materiaux PDFДокумент30 страниц(RDM) (CO) Resistance Des Materiaux PDFZoro LeadОценок пока нет
- Cours CinematiqueДокумент17 страницCours Cinematiqueecomech0% (1)
- Corrigé TD 21 - Comportement Statique Des SystèmesДокумент7 страницCorrigé TD 21 - Comportement Statique Des Systèmesbhs channel100% (1)
- Chapitre 2 TorseursДокумент13 страницChapitre 2 TorseursHediFatnassiОценок пока нет
- Équilibrage Des Solides Tournants Profs PDFДокумент8 страницÉquilibrage Des Solides Tournants Profs PDFfitasmounirОценок пока нет
- 14 Modelisation CinematiqueДокумент10 страниц14 Modelisation Cinematiquemezziwalid099411Оценок пока нет
- Ch05 Géométrie de MasseДокумент22 страницыCh05 Géométrie de Massemarwa logabОценок пока нет
- 45 Mecanique-VibratoireДокумент25 страниц45 Mecanique-VibratoireMohamed Taha MhiriОценок пока нет
- Comportement Statique Des SystèmesДокумент23 страницыComportement Statique Des Systèmeskokonut84Оценок пока нет
- TD 17 - Liaisons Équivalentes PDFДокумент5 страницTD 17 - Liaisons Équivalentes PDFAbdelhakОценок пока нет
- Sec Minesponts 2004 Sic PSIДокумент12 страницSec Minesponts 2004 Sic PSIAlexandre BourrieauОценок пока нет
- TD 4 CorrДокумент5 страницTD 4 CorrMeng HeangОценок пока нет
- Modélisation Cinématique Des Liaisons PDFДокумент25 страницModélisation Cinématique Des Liaisons PDFSamir KhОценок пока нет
- Exo 01 03Документ5 страницExo 01 03Hamza RimiОценок пока нет
- Cahier Dexercices (2019)Документ31 страницаCahier Dexercices (2019)lounesОценок пока нет
- Chapitre 5 Caracteristiques Inertie Des SolidesДокумент21 страницаChapitre 5 Caracteristiques Inertie Des Solidesjoe100% (1)
- 3-Cotation Fonctionnelle ELДокумент22 страницы3-Cotation Fonctionnelle ELHoussem MOURADIОценок пока нет
- Examen Corrige Rattrapage 2017 GCДокумент4 страницыExamen Corrige Rattrapage 2017 GCTps TaquillaОценок пока нет
- 04.1 TD N 1 Centre D Inertie Aire VolumeДокумент9 страниц04.1 TD N 1 Centre D Inertie Aire VolumeYahya Elamrani50% (2)
- 0 - Rappel Cinématique &Документ2 страницы0 - Rappel Cinématique &Kamel HamdiОценок пока нет
- DS1 MP - 13 - 11 - 21 (Sujet)Документ7 страницDS1 MP - 13 - 11 - 21 (Sujet)LASSOUED WAJDIОценок пока нет
- Systemes Isostatiques PDFДокумент5 страницSystemes Isostatiques PDFImmamHadramyОценок пока нет
- Sujets de Méca Géné 2009Документ110 страницSujets de Méca Géné 2009souheil_sou100% (4)
- Courbe de BézierДокумент39 страницCourbe de BézierYosra JbeliОценок пока нет
- Cours Cinematique GraphДокумент11 страницCours Cinematique GraphEtienne BouronОценок пока нет
- Chapitre 1 2019 2020Документ96 страницChapitre 1 2019 2020SaidОценок пока нет
- 1-Liaisons en Parallèles: X Z Z XДокумент12 страниц1-Liaisons en Parallèles: X Z Z XLarbi Elbakkali100% (1)
- RDM Examen 02 CorrigéДокумент9 страницRDM Examen 02 CorrigéHassnae Aznag100% (1)
- Recueil D' Épreuves DUT-BTS Mécanique - 2003Документ19 страницRecueil D' Épreuves DUT-BTS Mécanique - 2003Bradley CaseОценок пока нет
- Comportement Mécanique Des matériaux-TDДокумент6 страницComportement Mécanique Des matériaux-TDNS ADОценок пока нет
- Cinématique Du SolideДокумент20 страницCinématique Du Solidemaraghni_hassine7592100% (1)
- TD 7 Contraintes Eprouvette 20 21Документ1 страницаTD 7 Contraintes Eprouvette 20 21NoemОценок пока нет
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОт EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОценок пока нет
- Dossier-Les MateriauxДокумент22 страницыDossier-Les MateriauxGhada MouedhenОценок пока нет
- Elastic Deformations FrenchДокумент1 страницаElastic Deformations FrenchGhada MouedhenОценок пока нет
- Coloriage Gratuit Blinkbook VieДокумент1 страницаColoriage Gratuit Blinkbook VieGhada MouedhenОценок пока нет
- Longueur Développée Abaque Pli UniversДокумент3 страницыLongueur Développée Abaque Pli UniversGhada MouedhenОценок пока нет
- Correction de Lexercice PliageДокумент2 страницыCorrection de Lexercice PliageGhada Mouedhen0% (1)
- Exercices de Révision 2 PDFДокумент12 страницExercices de Révision 2 PDFGhada Mouedhen100% (1)
- Liaison Glissiere ExempleДокумент2 страницыLiaison Glissiere ExempleGhada MouedhenОценок пока нет
- Ci4 GlissièreДокумент1 страницаCi4 GlissièreGhada Mouedhen0% (1)
- Cours Forge Sec1Документ38 страницCours Forge Sec1Kawtar BihiОценок пока нет
- Physique Statistique Résumé 02 - 220106 - 215936Документ28 страницPhysique Statistique Résumé 02 - 220106 - 215936ssh949345Оценок пока нет
- Arbre de DecisionДокумент6 страницArbre de DecisionLoic BeiyraОценок пока нет
- Poly Biocell QCM Rangueil 10-11Документ196 страницPoly Biocell QCM Rangueil 10-11bonneaug8100% (1)
- 2007 Antilles Exo1 Correction BenzoateMethyle 5.5ptsДокумент3 страницы2007 Antilles Exo1 Correction BenzoateMethyle 5.5ptsHafid Tlemcen Rossignol PoèteОценок пока нет
- Document de Maths Terminale ScientifiqueДокумент109 страницDocument de Maths Terminale Scientifiquejean100% (2)
- Ece 22 SVT 01Документ2 страницыEce 22 SVT 01ThildemaОценок пока нет
- Charge Permantes: Projet: Lotissement Al Massar, Route de Safi KM 5, Lot #264, MarrakechДокумент6 страницCharge Permantes: Projet: Lotissement Al Massar, Route de Safi KM 5, Lot #264, MarrakechMariaОценок пока нет
- Exercice Bac ÉclipseДокумент2 страницыExercice Bac ÉclipseamaelcheneyОценок пока нет
- Mesures Et IncertitudesДокумент4 страницыMesures Et IncertitudesmedwiseОценок пока нет
- 3ds MaxДокумент13 страниц3ds Maxأنور الغاليОценок пока нет
- FD P 18-662 (Oct.2005) - Guide D - Utilisation Des Normes NF EN 13383 (1 Et 2) Sur Les EnrochementsДокумент16 страницFD P 18-662 (Oct.2005) - Guide D - Utilisation Des Normes NF EN 13383 (1 Et 2) Sur Les EnrochementsDamouh MohamedОценок пока нет
- "Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchДокумент3 страницы"Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchAlexis James0% (1)
- Chapitre 1Документ26 страницChapitre 1HindОценок пока нет
- Cour #03son Et Onde SonoreДокумент33 страницыCour #03son Et Onde SonoreAMIN FERNANEОценок пока нет
- Dubois FRДокумент2 страницыDubois FRfun factОценок пока нет
- Touret A Meuler Corrige PDFДокумент2 страницыTouret A Meuler Corrige PDFMohamed Soibaha ChaambaneОценок пока нет
- Chap1-Mouvement de Centre D'inertie (6h)Документ5 страницChap1-Mouvement de Centre D'inertie (6h)KabaОценок пока нет
- ViotДокумент179 страницViottoto_awayОценок пока нет
- 2005 09 National Correction Exo1 EauPiscine 4ptsДокумент2 страницы2005 09 National Correction Exo1 EauPiscine 4ptsFaiçalEssaberyОценок пока нет
- De La Gravitation Quantique - Carlo RovelliДокумент9 страницDe La Gravitation Quantique - Carlo RovelliMichael64Оценок пока нет
- Demarche D'un ProjetДокумент7 страницDemarche D'un ProjetBoughrara anisОценок пока нет
- DS04Документ2 страницыDS04Lehacoeur De parisОценок пока нет
- Haut-Rhin - Risques SismiquesДокумент8 страницHaut-Rhin - Risques SismiquesDubois JulienОценок пока нет
- Chapitre 1: Statique Des FluidesДокумент26 страницChapitre 1: Statique Des FluidesBrahim MouhcineОценок пока нет
- 6SL3210-1PE22-7UL0 Datasheet FR enДокумент3 страницы6SL3210-1PE22-7UL0 Datasheet FR enVladimir Mar Roüchköff DioufОценок пока нет
- Ameriquen2 2022 Exercice1Документ4 страницыAmeriquen2 2022 Exercice1Hassaneahamed BoungoueniОценок пока нет
- CCTP 07 Electricite 2 PDFДокумент39 страницCCTP 07 Electricite 2 PDFABELWALIDОценок пока нет
- M Ea Gro JMF 01Документ5 страницM Ea Gro JMF 01djidosseОценок пока нет