Вам также может понравиться
- 21-2016 Fi Teoria de Números Complejos 21-07 PDFДокумент60 страниц21-2016 Fi Teoria de Números Complejos 21-07 PDFJoaquin MendezОценок пока нет
- Matrices Escalonadas ReducidasДокумент4 страницыMatrices Escalonadas ReducidasOmar Enrique Molaya DuranОценок пока нет
- Cilindro volumen fórmulaДокумент6 страницCilindro volumen fórmulaAlejandro HGОценок пока нет
- Numeros ComplejosДокумент16 страницNumeros ComplejosCarlos EafОценок пока нет
- Derivacion de Funciones de Varias VariablesДокумент49 страницDerivacion de Funciones de Varias VariablesWinie Stephany FernandezОценок пока нет
- Superficies en Coordenadas Cilíndricas y EsféricasДокумент3 страницыSuperficies en Coordenadas Cilíndricas y EsféricasJosé Miguel FloresОценок пока нет
- Practica Dirigida 2 Derivada Parcial y DireccionalДокумент2 страницыPractica Dirigida 2 Derivada Parcial y DireccionalArturo CamonesОценок пока нет
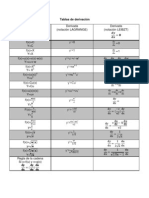
- Formulario de DerivadasДокумент1 страницаFormulario de DerivadasMiguel Lopez100% (1)
- Guía Práctica de Cálculo VectorialДокумент5 страницGuía Práctica de Cálculo VectorialLuisОценок пока нет
- Problemas de Cálculo IIДокумент6 страницProblemas de Cálculo IIEdgardo Quiquia RodriguezОценок пока нет
- Series Numericas GranadaДокумент17 страницSeries Numericas Granadazenit512Оценок пока нет
- Análisis Matemático II: Distancia y Topología en RnДокумент13 страницAnálisis Matemático II: Distancia y Topología en RnDaniela KrivohlavyОценок пока нет
- Geometria de Las Figuras PlanasДокумент14 страницGeometria de Las Figuras PlanasClauPerez100% (17)
- Limite y ContinuidadДокумент25 страницLimite y ContinuidadEuge CorreaОценок пока нет
- 2do Examen de Cálculo I (UNSL)Документ8 страниц2do Examen de Cálculo I (UNSL)Miguel Berardi Alfonso100% (1)
- Cholesky 2Документ4 страницыCholesky 2Carlos Alberto CCdlcОценок пока нет
- Formulas de Vectores en El PlanoДокумент1 страницаFormulas de Vectores en El PlanoEdgar BonifazОценок пока нет
- Circunferencia PDFДокумент19 страницCircunferencia PDFYoverlys TaboadaОценок пока нет
- Apuntes de Cálculo Varias Variables - 2016 - ArandaДокумент104 страницыApuntes de Cálculo Varias Variables - 2016 - ArandaCristian Lemus Borja100% (1)
- Martínez - Integral de LíneaДокумент12 страницMartínez - Integral de LíneaFandom Boice BarranquillaОценок пока нет
- Ejercicios de Ecuaciones DiferencialesДокумент6 страницEjercicios de Ecuaciones DiferencialesJose Garay AricaОценок пока нет
- Teorema de StokesДокумент6 страницTeorema de StokesJesus ArroyoОценок пока нет
- 3Документ65 страниц3German Alonso ParadaОценок пока нет
- Ecuaciones algebraicas y exponencialesДокумент45 страницEcuaciones algebraicas y exponencialesjulioОценок пока нет
- 8 Álgebra de FuncionesДокумент54 страницы8 Álgebra de FuncionesElea Lopez100% (1)
- Ecuación DiferencialДокумент12 страницEcuación DiferencialJose Vasquez Vargas100% (1)
- Glosario de Fisica de Los VectoresДокумент4 страницыGlosario de Fisica de Los VectoresNataly Beltrán100% (1)
- Tabla Funciones Inversas para DespejesДокумент1 страницаTabla Funciones Inversas para DespejesAdoFTPОценок пока нет
- Libro Calculo MultivariableДокумент75 страницLibro Calculo MultivariableCristian EmhartОценок пока нет
- Problemas de Cálculo Integral ResueltosДокумент12 страницProblemas de Cálculo Integral ResueltosAndres GutierrezОценок пока нет
- Calculo VectorialДокумент11 страницCalculo VectorialStyven Reyes NuñezОценок пока нет
- Integral IndefinidaДокумент22 страницыIntegral IndefinidaMANUEL ANGEL ROMERO HERNANDEZОценок пока нет
- Resolucion de InecuacionesДокумент3 страницыResolucion de InecuacionesOscar MuñozОценок пока нет
- Series de Fourier (Bruzual - Dominguez)Документ67 страницSeries de Fourier (Bruzual - Dominguez)Macarena Catalán GonzálezОценок пока нет
- Demidovich 1192Документ2 страницыDemidovich 1192Damian Reinoso100% (1)
- Ejercicios resueltos funciones varias variablesДокумент50 страницEjercicios resueltos funciones varias variablesBasago Minas Lo MejorОценок пока нет
- Transformaciones LinealesДокумент19 страницTransformaciones LinealesPAMELA PALMAОценок пока нет
- Ecuaciones Diferenciales PEP 3 (Usach)Документ1 страницаEcuaciones Diferenciales PEP 3 (Usach)Macarena Catalán González100% (1)
- Hipérbola InclinadaДокумент5 страницHipérbola InclinadaAnto DelgadoОценок пока нет
- U9b. Integrales TriplesДокумент16 страницU9b. Integrales TriplesAbel ChaparroОценок пока нет
- Problemario Calculo VectorialДокумент11 страницProblemario Calculo VectorialBerenis JeronimoОценок пока нет
- Ejercicios de Ecuaciones Diferenciales OrdinariasОт EverandEjercicios de Ecuaciones Diferenciales OrdinariasРейтинг: 4 из 5 звезд4/5 (1)
- Geometría Analítica Del EspacioДокумент34 страницыGeometría Analítica Del EspacioAMYNNXXXXОценок пока нет
- Vectores en r3 y RectasДокумент14 страницVectores en r3 y RectasJhordan ValdiviaОценок пока нет
- Planos en R3Документ16 страницPlanos en R3Sts CabaltarОценок пока нет
- Rectas y PlanosДокумент7 страницRectas y PlanosjuanОценок пока нет
- Puntos Rectas PlanosДокумент4 страницыPuntos Rectas PlanosNilser Aguilar SilvaОценок пока нет
- Ejercicios Mat102Документ11 страницEjercicios Mat102Brian VelaОценок пока нет
- Practico 1 - 2020Документ5 страницPractico 1 - 2020Mati BollatiОценок пока нет
- Puntos Rectas Planos PDFДокумент16 страницPuntos Rectas Planos PDFFenixDaryОценок пока нет
- s9 - Introducción A La Geometría AnáliticaДокумент21 страницаs9 - Introducción A La Geometría Análiticaesthefany lazaro villanoОценок пока нет
- Geometria en El EspacioДокумент30 страницGeometria en El Espacioelizabeth paola martinezОценок пока нет
- Guía CompletaДокумент33 страницыGuía CompletahoracioОценок пока нет
- Planos y Rectas en El EspacioДокумент15 страницPlanos y Rectas en El EspacioAbelardo Zuniga VaqueroОценок пока нет
- Práctica 2Документ3 страницыPráctica 2Victor GarciaОценок пока нет
- AL-DC Taller 4 2023-3Документ4 страницыAL-DC Taller 4 2023-3Jorge BoteroОценок пока нет
- Relacion 2Документ4 страницыRelacion 2Manuel David Mora HervasОценок пока нет
- Futuro Con La Ingenieria MecanicaДокумент2 страницыFuturo Con La Ingenieria MecanicaMiguel FloresОценок пока нет
- Beneficios de La Ingenieria MecanicaДокумент2 страницыBeneficios de La Ingenieria MecanicaMiguel FloresОценок пока нет
- Caracteristicas de Un Buen LiderДокумент9 страницCaracteristicas de Un Buen LiderMiguel FloresОценок пока нет
- Niveles de LecturaДокумент3 страницыNiveles de LecturaMiguel FloresОценок пока нет
- Tipos de EmprendimientoДокумент5 страницTipos de EmprendimientoMiguel FloresОценок пока нет
- Syllabus de Emprendimiento Tercero BachilleratoДокумент2 страницыSyllabus de Emprendimiento Tercero BachilleratoMiguel FloresОценок пока нет
- Ejercicios Partida Doble Tipos de Saldo Deudor Acreedor Saldo CeroДокумент2 страницыEjercicios Partida Doble Tipos de Saldo Deudor Acreedor Saldo CeroMiguel FloresОценок пока нет
- Formación Humana. ValoresДокумент3 страницыFormación Humana. ValoresMiguel FloresОценок пока нет
- Tipos de EnsayoДокумент3 страницыTipos de EnsayoMiguel FloresОценок пока нет
- Nociones Básicas de LecturaДокумент2 страницыNociones Básicas de LecturaMiguel FloresОценок пока нет
- Tipos de Emprendimiento y LiderazgoДокумент7 страницTipos de Emprendimiento y LiderazgoMiguel FloresОценок пока нет
- Investigacion EmprendimientoДокумент3 страницыInvestigacion EmprendimientoMiguel FloresОценок пока нет
- Syllabus de Emprendimiento Segundo Bachillerato. WordДокумент1 страницаSyllabus de Emprendimiento Segundo Bachillerato. WordMiguel FloresОценок пока нет
- Taller Individual Conceptos de Contabilidad.Документ2 страницыTaller Individual Conceptos de Contabilidad.Miguel FloresОценок пока нет
- Ejercicio de C Alculo de Impuesto A La RentaДокумент3 страницыEjercicio de C Alculo de Impuesto A La RentaMiguel FloresОценок пока нет
- Taller Tablas Dinamicas.Документ1 страницаTaller Tablas Dinamicas.Miguel FloresОценок пока нет
- Taller Ingresos Gastos InversionДокумент2 страницыTaller Ingresos Gastos InversionMiguel FloresОценок пока нет
- Taller Emprendimiento. ScribДокумент2 страницыTaller Emprendimiento. ScribMiguel FloresОценок пока нет
- Taller Cuestionario Matriz de La Situación de MercadoДокумент3 страницыTaller Cuestionario Matriz de La Situación de MercadoMiguel FloresОценок пока нет
- Investigación Transito AmaguañaДокумент2 страницыInvestigación Transito AmaguañaMiguel FloresОценок пока нет
- Syllabus de Emprendimiento Segundo BachilleratoДокумент1 страницаSyllabus de Emprendimiento Segundo BachilleratoMiguel FloresОценок пока нет
- Taller 1 de Conceptos FinancierosДокумент2 страницыTaller 1 de Conceptos FinancierosMiguel FloresОценок пока нет
- Exposición de Ciudadania Luis OñateДокумент1 страницаExposición de Ciudadania Luis OñateMiguel FloresОценок пока нет
- Syllabus de Emprendimiento Tercero BachilleratoДокумент2 страницыSyllabus de Emprendimiento Tercero BachilleratoMiguel FloresОценок пока нет
- Taller Cuestionario Matriz de La Situación de MercadoДокумент3 страницыTaller Cuestionario Matriz de La Situación de MercadoMiguel FloresОценок пока нет
- Dia de La Cultura Tributaria - ScribДокумент1 страницаDia de La Cultura Tributaria - ScribMiguel FloresОценок пока нет
- Taller Individual Qué Son Las Niif.Документ1 страницаTaller Individual Qué Son Las Niif.Miguel FloresОценок пока нет
- Investigacion de Costos Fijos Variables Semifijjos para TallerДокумент3 страницыInvestigacion de Costos Fijos Variables Semifijjos para TallerMiguel FloresОценок пока нет
- Taller Evaluación GeneralДокумент2 страницыTaller Evaluación GeneralMiguel FloresОценок пока нет
- Taller Evaluación General 3Документ1 страницаTaller Evaluación General 3Miguel FloresОценок пока нет
- Tarea 3 Carlos RuizДокумент7 страницTarea 3 Carlos RuizLuz marina tafurОценок пока нет
- MateIII20231 ParcialSolucionarioДокумент4 страницыMateIII20231 ParcialSolucionarioLuis Antonio Basagoitia VásquezОценок пока нет
- Determinantes y áreasДокумент7 страницDeterminantes y áreasFRANKIL JOSE SARMIENTO MEZA-Estudiante VirtualОценок пока нет
- 14 El Kernel y El Rango de Una Transformación LinealДокумент17 страниц14 El Kernel y El Rango de Una Transformación Linealfernanda saenz50% (2)
- Informe N°2Документ5 страницInforme N°2Magaly ChipanaОценок пока нет
- Diagonalizacion OrtogonalДокумент12 страницDiagonalizacion Ortogonalwaldemar107Оценок пока нет
- Análisis Tiempo Historia Con Mathcad PrimeДокумент34 страницыAnálisis Tiempo Historia Con Mathcad PrimeGilmer Calderon QuispeОценок пока нет
- de Clase Semana 02Документ30 страницde Clase Semana 02Carlos BejaranoОценок пока нет
- Ej Res Op Basicas Vectores II PDFДокумент5 страницEj Res Op Basicas Vectores II PDFjoel rico aroniОценок пока нет
- Clase 7 - Derivada DireccionalДокумент28 страницClase 7 - Derivada DireccionalRodrigo VirgoliniОценок пока нет
- Ejercicio 4 Algebra LinealДокумент4 страницыEjercicio 4 Algebra LinealLina FlórezОценок пока нет
- Problema de Aplicación de Sistema de EcuacionesДокумент3 страницыProblema de Aplicación de Sistema de EcuacionesJosehiner Guerrero71% (7)
- Matriz BooleanaДокумент10 страницMatriz BooleanaRoger Martinez DxОценок пока нет
- Preguntas GeneradorasДокумент11 страницPreguntas GeneradorasNicolas MuñozОценок пока нет
- S01 - HT - Sistema de Unidades, Vectores Trabajo Bayron CLAVIJO RUEDAДокумент5 страницS01 - HT - Sistema de Unidades, Vectores Trabajo Bayron CLAVIJO RUEDANicolas Clavijo RuedaОценок пока нет
- Álgebra Lineal Examen 3Документ4 страницыÁlgebra Lineal Examen 3DonGerardОценок пока нет
- Aaron Velazquez - Transformaciones Lineales y Vectores PropiosДокумент6 страницAaron Velazquez - Transformaciones Lineales y Vectores PropiosJesus J. Aaron VeguОценок пока нет
- Oposiciones SecundariaTemarioДокумент2 страницыOposiciones SecundariaTemariosumausalОценок пока нет
- Practica2 2020 MAT 103 UMSAДокумент3 страницыPractica2 2020 MAT 103 UMSAJosh EstebanОценок пока нет
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - ALGEBRA LINEAL - (GRUPO B03)Документ9 страницEvaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - ALGEBRA LINEAL - (GRUPO B03)Camilo Andrés MuñozОценок пока нет
- Problemas MatemáticasДокумент10 страницProblemas MatemáticasrereeesОценок пока нет
- Evaluacion Trabajo Practico 4 tp4 171118Документ11 страницEvaluacion Trabajo Practico 4 tp4 171118NicolasОценок пока нет
- Operaderes LinealesДокумент36 страницOperaderes LinealesJose Camilo LopezОценок пока нет
- Apuntes Álgebra Lineal PDFДокумент325 страницApuntes Álgebra Lineal PDFFelipe Hermosilla PerezОценок пока нет
- Matemáticas para Economistas 2Документ3 страницыMatemáticas para Economistas 2Sandra CanalesОценок пока нет
- Vectores en El PlanoДокумент3 страницыVectores en El PlanoNataly ToribioОценок пока нет
- Guia de Actividades Practicas Unidad 2Документ5 страницGuia de Actividades Practicas Unidad 2Ximena Violeta Ordoñez BandaОценок пока нет
- Sistemas de ecuaciones lineales y vectoresДокумент2 страницыSistemas de ecuaciones lineales y vectoresJeanОценок пока нет
- Taller 5 Rectas y PlanosДокумент3 страницыTaller 5 Rectas y Planosn4Оценок пока нет
- Segundo Parcial 2C 2023 Tema 1 Con Respuesta DesarrolladaДокумент3 страницыSegundo Parcial 2C 2023 Tema 1 Con Respuesta DesarrolladaLUNAОценок пока нет