Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- MA8352-Linear Algebra and Partial Differential EquationsДокумент2 страницыMA8352-Linear Algebra and Partial Differential Equationssyed1188Оценок пока нет
- CE8351 SurveyingДокумент2 страницыCE8351 Surveyingsyed1188100% (1)
- AE6701 AvoinicsДокумент2 страницыAE6701 Avoinicssyed1188Оценок пока нет
- MG6851 - PomДокумент2 страницыMG6851 - Pomsyed1188Оценок пока нет
- Fibre Optics and Laser InstrumentationДокумент13 страницFibre Optics and Laser Instrumentationsyed1188Оценок пока нет
- EE6702Документ1 страницаEE6702syed1188Оценок пока нет
- Me6703 CimsДокумент2 страницыMe6703 Cimssyed1188Оценок пока нет
- CE8301-Strength of Materials IДокумент4 страницыCE8301-Strength of Materials Isyed1188Оценок пока нет
- Fibre Optics and Laser InstrumentationДокумент13 страницFibre Optics and Laser Instrumentationsyed1188Оценок пока нет
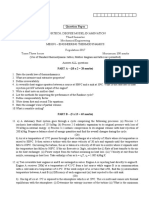
- Me8391 - EtdДокумент3 страницыMe8391 - Etdsyed1188Оценок пока нет
- Anna University, Chennai - 25.: Certificate of Opening of Session Wise Package of Question PapersДокумент1 страницаAnna University, Chennai - 25.: Certificate of Opening of Session Wise Package of Question Paperssyed1188Оценок пока нет
- GE6083-Disaster ManagementДокумент1 страницаGE6083-Disaster Managementsyed1188Оценок пока нет
- Ee6701 HveДокумент1 страницаEe6701 Hvesyed1188Оценок пока нет
- MG6851 - PomДокумент2 страницыMG6851 - Pomsyed1188Оценок пока нет
- Iiy Iiis U3 Ec8353 Edc 2020 21 PDFДокумент1 страницаIiy Iiis U3 Ec8353 Edc 2020 21 PDFsyed1188Оценок пока нет
- Third Internal Assessment Question PaperДокумент2 страницыThird Internal Assessment Question Papersyed1188Оценок пока нет
- Department of Electrical and Electronics Engineering: Third Internal Assessment TestДокумент1 страницаDepartment of Electrical and Electronics Engineering: Third Internal Assessment Testsyed1188Оценок пока нет
- EE6007Документ2 страницыEE6007syed1188Оценок пока нет
- Department of Electrical and Electronics Engineering: Third Internal Assessment TestДокумент1 страницаDepartment of Electrical and Electronics Engineering: Third Internal Assessment Testsyed1188Оценок пока нет
- DSP Question Paper on FFT AlgorithmsДокумент1 страницаDSP Question Paper on FFT Algorithmssyed1188Оценок пока нет
- MIDEENRESUMДокумент3 страницыMIDEENRESUMsyed1188Оценок пока нет
- Third Internal Assessment Question PaperДокумент1 страницаThird Internal Assessment Question Papersyed1188Оценок пока нет
- Detection of Moisture Content in Transformer Oil Using Platinum Coated On DДокумент1 страницаDetection of Moisture Content in Transformer Oil Using Platinum Coated On Dsyed1188Оценок пока нет
- Third assessment test question paper fiber optics lasersДокумент1 страницаThird assessment test question paper fiber optics laserssyed1188Оценок пока нет
- Concept of Trade Mark Under The Trade Marks Act 1999 and The Protection of Domain Names Under Indian LawДокумент9 страницConcept of Trade Mark Under The Trade Marks Act 1999 and The Protection of Domain Names Under Indian Lawsyed1188Оценок пока нет
- Salinity Sensor Using Photonic Crystal FiberДокумент1 страницаSalinity Sensor Using Photonic Crystal Fibersyed1188Оценок пока нет
- Mohamed Sathak Engineering College, Kilakarai Department of Civil EngineeringДокумент1 страницаMohamed Sathak Engineering College, Kilakarai Department of Civil Engineeringsyed1188Оценок пока нет
- Sfuntmpl DirectfeedДокумент3 страницыSfuntmpl DirectfeedRenzoChavezJuradoОценок пока нет
- IpsooДокумент1 страницаIpsoosyed1188Оценок пока нет
- Transmission Congestion Mitigation Using IPSO AlgorithmДокумент5 страницTransmission Congestion Mitigation Using IPSO Algorithmsyed1188Оценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- KPSC/ KSEB/ SSC Electrical Score Academy: Questions: 75Документ9 страницKPSC/ KSEB/ SSC Electrical Score Academy: Questions: 75sreevasanthОценок пока нет
- Fluid MechДокумент10 страницFluid MechPrasant KumarОценок пока нет
- Arcline® PP.: TIG Quality at MIG Productivity in Aluminium WeldingДокумент12 страницArcline® PP.: TIG Quality at MIG Productivity in Aluminium WeldingRaajОценок пока нет
- Furnace Incident During DecokingДокумент9 страницFurnace Incident During DecokingMohamed Sayed AbdoОценок пока нет
- MVDC-Connected Offshore Wind Power Hybrid Resonant ConverterДокумент4 страницыMVDC-Connected Offshore Wind Power Hybrid Resonant ConverterBrightworld ProjectsОценок пока нет
- JCM Hybrid Controller User ManualДокумент13 страницJCM Hybrid Controller User ManualMtvc LbОценок пока нет
- MANUAL Vdocuments - Site FG Wilson P88e1Документ287 страницMANUAL Vdocuments - Site FG Wilson P88e1eletronica55100% (2)
- 001 NemДокумент4 страницы001 NemNg Han PeiОценок пока нет
- Hum BirdДокумент179 страницHum BirdSuman ChhetryОценок пока нет
- ZhangДокумент21 страницаZhangjajajaja21Оценок пока нет
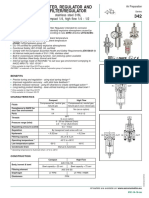
- Numatics Series 342Документ6 страницNumatics Series 342Jebran FarazОценок пока нет
- Model AR Ellipse® Annular Flow Meter PDFДокумент2 страницыModel AR Ellipse® Annular Flow Meter PDFjhorlanОценок пока нет
- Separating Acetic Acid and Water by DistillationДокумент8 страницSeparating Acetic Acid and Water by DistillationSuzanne Clariz M. BaltazarОценок пока нет
- Chemical Reactions: Physical Vs Chemical ChangesДокумент7 страницChemical Reactions: Physical Vs Chemical ChangesIfra HassanОценок пока нет
- 9.6MVA - Technical Specifications For Inverter Duty TransformerДокумент7 страниц9.6MVA - Technical Specifications For Inverter Duty Transformerarunghandwal100% (2)
- Quantum Engine Series: Ower AtingsДокумент2 страницыQuantum Engine Series: Ower AtingsAlbertoОценок пока нет
- Elective 4 Module1Документ27 страницElective 4 Module1kentong compraОценок пока нет
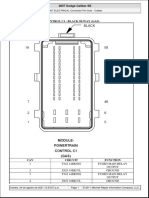
- Caliber Modulo PCM PinoutДокумент7 страницCaliber Modulo PCM PinoutManuel Suarez100% (3)
- SOF National Science Olympiad 2018-19 GuidelinesДокумент7 страницSOF National Science Olympiad 2018-19 GuidelinesRahul SinhaОценок пока нет
- July 8 Pages - Gowrie NewsДокумент16 страницJuly 8 Pages - Gowrie NewsTonya HarrisonОценок пока нет
- محطات الطاقةДокумент22 страницыمحطات الطاقةJoe LewisОценок пока нет
- Pump Mechanical Seals GuideДокумент41 страницаPump Mechanical Seals GuideArief Hidayat100% (1)
- General Principles of Freeze Drying (The Lyophilization Process)Документ9 страницGeneral Principles of Freeze Drying (The Lyophilization Process)Shefali PawarОценок пока нет
- 240-56063867 Transformer and Reactor Rapid Pressure Rise RelayДокумент6 страниц240-56063867 Transformer and Reactor Rapid Pressure Rise RelayMichael NgubaneОценок пока нет
- Ul 854 - 2014 PDFДокумент64 страницыUl 854 - 2014 PDFDouglasОценок пока нет
- Mechatronics Handbook - 02 - Mechatronic Design Approach PDFДокумент16 страницMechatronics Handbook - 02 - Mechatronic Design Approach PDFJosé Fernando TerronesОценок пока нет
- 3/27/2016 Portable AC On Rent Pune - Portable AC Rentals Pune - AC Rentals Pune On SulekhaДокумент3 страницы3/27/2016 Portable AC On Rent Pune - Portable AC Rentals Pune - AC Rentals Pune On SulekhadcoolsamОценок пока нет
- DBB ValveДокумент6 страницDBB ValveshyamОценок пока нет
- EnergySRP Forms MatchingДокумент2 страницыEnergySRP Forms Matchingeiad-mahmoudОценок пока нет