Вам также может понравиться
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesОт EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesОценок пока нет
- Power System StabilityДокумент9 страницPower System StabilityराघवतोतलाОценок пока нет
- Transient AnalysisДокумент16 страницTransient Analysisdr_biltОценок пока нет
- Steady State Stability Studies Are Restricted To Small and Gradual Changes in The System OperatingДокумент16 страницSteady State Stability Studies Are Restricted To Small and Gradual Changes in The System OperatingShafayet UddinОценок пока нет
- Power Swing EquationДокумент2 страницыPower Swing EquationFatima MirОценок пока нет
- Power SwinggДокумент2 страницыPower SwinggFatima MirОценок пока нет
- Equal Area CriterionДокумент6 страницEqual Area CriterionNanda Kishore RayОценок пока нет
- Swing Equation PDFДокумент2 страницыSwing Equation PDFNavya ReddyОценок пока нет
- Operation On Infinite Bus BarДокумент6 страницOperation On Infinite Bus BarpremameОценок пока нет
- FIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)Документ32 страницыFIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)starboyОценок пока нет
- Wind Turbine Power CalculationДокумент5 страницWind Turbine Power CalculationRavi Acharya100% (2)
- 23 Wind TurbineДокумент5 страниц23 Wind TurbineErtuğrul ÖzelОценок пока нет
- Direct Current Rotational Mechanical Energy: Transfer Function of The DC MotorДокумент5 страницDirect Current Rotational Mechanical Energy: Transfer Function of The DC Motorkubu2689Оценок пока нет
- Working and Operating Principle of DC MotorДокумент40 страницWorking and Operating Principle of DC MotorAung NetflixОценок пока нет
- DC Brush Motor TheoryДокумент7 страницDC Brush Motor Theoryjfsmenezes4534Оценок пока нет
- Optimaloperationofparalleledpowertransformers 12865514881524 Phpapp01 PDFДокумент5 страницOptimaloperationofparalleledpowertransformers 12865514881524 Phpapp01 PDFJuan Carlos Velasquez PiamoОценок пока нет
- Wind Energy Training Ch#4Документ44 страницыWind Energy Training Ch#4Munseb AliОценок пока нет
- P. C. Sen - Principles of Electric Machines 2edДокумент634 страницыP. C. Sen - Principles of Electric Machines 2edwilliancsm100% (1)
- Pole-Amplitude ModulationДокумент6 страницPole-Amplitude ModulationnandhakumarmeОценок пока нет
- Wind ExamДокумент8 страницWind ExamwaltikraОценок пока нет
- Wind Turbine Power Calculation PDFДокумент5 страницWind Turbine Power Calculation PDFsmartman35Оценок пока нет
- Swes Unit 3Документ64 страницыSwes Unit 3pradeepОценок пока нет
- Power System StabilityДокумент78 страницPower System StabilityGeetha GaganОценок пока нет
- Wednesday, July 15, 2020 DC MotorДокумент5 страницWednesday, July 15, 2020 DC MotorRayhan TalukderОценок пока нет
- Dynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Документ7 страницDynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Savan RathodОценок пока нет
- Dynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Документ7 страницDynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Savan RathodОценок пока нет
- Review QuestionsДокумент15 страницReview QuestionsSuganthiVasanОценок пока нет
- 1 Permanent Magnet GeneratorДокумент6 страниц1 Permanent Magnet GeneratorGanti KameshОценок пока нет
- 23 Wind Turbine PDFДокумент5 страниц23 Wind Turbine PDFNeil Ivan ArmarioОценок пока нет
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyДокумент13 страницIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyAsimОценок пока нет
- Motor EletrikДокумент6 страницMotor EletrikAshok GuevaraОценок пока нет
- Ferrite Transformer Turns CalculationДокумент6 страницFerrite Transformer Turns CalculationMaher Mansour100% (2)
- Ferrite Transformer Turns Calculation For HighДокумент67 страницFerrite Transformer Turns Calculation For Highjaigodara0% (1)
- Electric Drive Systems - Lecture No.11Документ12 страницElectric Drive Systems - Lecture No.11saiedali2005Оценок пока нет
- Ferrite Transformer Turns Calculation For HighДокумент67 страницFerrite Transformer Turns Calculation For HighJaiParkash100% (1)
- Simulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorДокумент9 страницSimulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDanny LiОценок пока нет
- The Elementary Mathematical Model For Synchronous MachinesДокумент40 страницThe Elementary Mathematical Model For Synchronous Machinestyc1986Оценок пока нет
- Sinusoidal PMAC Motor - 6th AprilДокумент4 страницыSinusoidal PMAC Motor - 6th AprilSourav KumarОценок пока нет
- Modeling and Simulation of PMSG Based Wecs: Jamuna V Baskar M Senthoorselvam DДокумент5 страницModeling and Simulation of PMSG Based Wecs: Jamuna V Baskar M Senthoorselvam DSundaraPandiyanОценок пока нет
- Chapter Thirteen: DC Drives Using Controlled RectifiersДокумент38 страницChapter Thirteen: DC Drives Using Controlled Rectifiersyemane gebremichal100% (2)
- How To Calculate Ferrite Core TransformersДокумент6 страницHow To Calculate Ferrite Core Transformersmetinprivat01Оценок пока нет
- 230 Power System Stability PDFДокумент31 страница230 Power System Stability PDFBelayneh TadesseОценок пока нет
- Synchronous Machine 1Документ6 страницSynchronous Machine 1dmug793Оценок пока нет
- 3 Phase Slip Ring Inductionmotor LoadtestДокумент9 страниц3 Phase Slip Ring Inductionmotor LoadtestBhatia AdvancedОценок пока нет
- 2 - Mesin DCДокумент25 страниц2 - Mesin DCLipasya HamdhaniОценок пока нет
- The Equivalent Circuit and Torque of Three-Phase Induction MotorДокумент11 страницThe Equivalent Circuit and Torque of Three-Phase Induction Motorعمر تاليونОценок пока нет
- AGC2Документ16 страницAGC2Fengxing ZhuОценок пока нет
- Speed Control of Induction Motor PDFДокумент12 страницSpeed Control of Induction Motor PDFbalaer05Оценок пока нет
- Easy(er) Electrical Principles for General Class Ham License (2015-2019)От EverandEasy(er) Electrical Principles for General Class Ham License (2015-2019)Рейтинг: 5 из 5 звезд5/5 (1)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОт EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsОценок пока нет
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetОт EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetОценок пока нет
- Handbook of Power Systems Engineering with Power Electronics ApplicationsОт EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОценок пока нет
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)От EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Оценок пока нет
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)От EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Оценок пока нет
- Neusource Entreprneurial Guide: Entrepreneurial SpiritДокумент23 страницыNeusource Entreprneurial Guide: Entrepreneurial SpiritRavi Kumar BanalaОценок пока нет
- Price List: HT Single Core Power Cables - Aluminium Conductor A2XwayДокумент1 страницаPrice List: HT Single Core Power Cables - Aluminium Conductor A2XwayRavi Kumar BanalaОценок пока нет
- Size of Transformer's Circuit Braker & Fuse (10.6.13)Документ31 страницаSize of Transformer's Circuit Braker & Fuse (10.6.13)arunpandey1686Оценок пока нет
- Lec 01Документ34 страницыLec 01Ravi Kumar BanalaОценок пока нет
- 19th Jan 2012 Wire Price ListДокумент2 страницы19th Jan 2012 Wire Price ListRahul SukumarОценок пока нет
- Cloud Computing OverviewДокумент13 страницCloud Computing Overviewgangesh.dubey8616Оценок пока нет
- Memory Allocation Functions: C Gives Us Two Choices When We Want To Reserve Memory Locations For An ObjectДокумент22 страницыMemory Allocation Functions: C Gives Us Two Choices When We Want To Reserve Memory Locations For An ObjectRavi Kumar BanalaОценок пока нет
- Band Theory of Soids5!1!13Документ20 страницBand Theory of Soids5!1!13Ravi Kumar BanalaОценок пока нет
- Answer Keys Civil Services (P) Exam 2012 Paper I&IIДокумент4 страницыAnswer Keys Civil Services (P) Exam 2012 Paper I&IIRavi Kumar BanalaОценок пока нет
- 14Документ61 страница14Ravi Kumar BanalaОценок пока нет
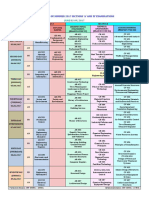
- Programme of Summer 2017 Sections A' and B' Examinations: JUNE 03-09, 2017Документ3 страницыProgramme of Summer 2017 Sections A' and B' Examinations: JUNE 03-09, 2017Anurag PandeyОценок пока нет
- Answer Keys Civil Services (P) Exam 2012 Paper I&IIДокумент4 страницыAnswer Keys Civil Services (P) Exam 2012 Paper I&IIRavi Kumar BanalaОценок пока нет
- Amie W-2012Документ3 страницыAmie W-2012Prasanna KumarОценок пока нет
- AaДокумент1 страницаAaRavi Kumar BanalaОценок пока нет
- Watson - Guptill. (How To Draw) Portrait Drawing A Step-By-Step Art InstructioДокумент81 страницаWatson - Guptill. (How To Draw) Portrait Drawing A Step-By-Step Art InstructioJulia RamosОценок пока нет
- David Lewis - Pencil Drawing Techniques PDFДокумент138 страницDavid Lewis - Pencil Drawing Techniques PDFSophiaОценок пока нет
- Energy Audit For BuildingsДокумент4 страницыEnergy Audit For Buildingssubharth sahaОценок пока нет
- Electrical Installation DesignДокумент27 страницElectrical Installation DesignLasantha AbeykoonОценок пока нет
- ND Manual 2015-2016Документ110 страницND Manual 2015-2016Balakrushna SahuОценок пока нет
- EL Science ModuleДокумент9 страницEL Science ModuleDaryl Tormis EquinОценок пока нет
- Class9 PDFДокумент132 страницыClass9 PDFTanmay SagarОценок пока нет
- Space Phasor Theory and Control of Multiphase MachinesДокумент16 страницSpace Phasor Theory and Control of Multiphase MachinesvalentinmullerОценок пока нет
- A Unity Power Factor Converter Using HalfДокумент14 страницA Unity Power Factor Converter Using HalfLivia Faria PeresОценок пока нет
- Relativity For B.Tech 2021Документ51 страницаRelativity For B.Tech 2021anurag100% (1)
- RPT Physics F6 Second Term 2018Документ8 страницRPT Physics F6 Second Term 2018norhazli ibrahimОценок пока нет
- Nss College of Engineering: Bachelor of Technology Electrical and Electronics Engineering University of CalicutДокумент33 страницыNss College of Engineering: Bachelor of Technology Electrical and Electronics Engineering University of CalicutNidhiОценок пока нет
- ANSI BIFMA X5.9-2012 - Storage Units - TestsДокумент117 страницANSI BIFMA X5.9-2012 - Storage Units - TestsGODREJ LAB THANE100% (1)
- 55 W Kit Coleman ManualДокумент14 страниц55 W Kit Coleman ManualCésar Gerardo López DelgadoОценок пока нет
- CH 1Документ20 страницCH 1terasaini77Оценок пока нет
- TOM GTU Study Material GTU-Paper-Analysis All-Units 05102019072605AMДокумент23 страницыTOM GTU Study Material GTU-Paper-Analysis All-Units 05102019072605AMSanat PatelОценок пока нет
- IPC D - 317a High Speed Packaging PDFДокумент83 страницыIPC D - 317a High Speed Packaging PDFChung LeОценок пока нет
- 8-Magnetic CeramicsДокумент23 страницы8-Magnetic CeramicsbawokeОценок пока нет
- Effects of The Earth Current Frequency and Distortion On Residual Current DevicesДокумент6 страницEffects of The Earth Current Frequency and Distortion On Residual Current DevicesRidho Naufal100% (1)
- 635215952379094386498Документ128 страниц635215952379094386498bajricaОценок пока нет
- GP 12-25 - Earthing GroundingДокумент38 страницGP 12-25 - Earthing GroundingJohn Dry100% (2)
- First Quarter Exam in Science 8Документ9 страницFirst Quarter Exam in Science 8CaloykOoy Danday DueñasОценок пока нет
- Maxon Motor - Online Shop PDFДокумент5 страницMaxon Motor - Online Shop PDFFrank GОценок пока нет
- Optimized Skid Design For Compressor PackagesДокумент9 страницOptimized Skid Design For Compressor Packagesmario_gОценок пока нет
- How To Size Current TransformersДокумент3 страницыHow To Size Current TransformersVasu IyerОценок пока нет
- Modeling and Simulation of PFC ConvertersДокумент93 страницыModeling and Simulation of PFC ConvertersSanjeev Singh100% (1)
- Chapter 38 - Photons and Matter WavesДокумент12 страницChapter 38 - Photons and Matter WavesVV Cephei100% (1)
- Voltage Management: EnterДокумент24 страницыVoltage Management: EnterDaniel PrataОценок пока нет
- AsdddДокумент54 страницыAsdddSyazwan HafidziОценок пока нет
- Cbse Ncert CH 6 Questions BankДокумент12 страницCbse Ncert CH 6 Questions BankSumitОценок пока нет
- Proposal Setting Gi Punagaya - R1Документ31 страницаProposal Setting Gi Punagaya - R1wandy RJОценок пока нет
- 2nd Term BookletДокумент181 страница2nd Term BookletAhmed ElabasyОценок пока нет