Вам также может понравиться
- Vehicle Tracking SystemДокумент62 страницыVehicle Tracking SystempandiОценок пока нет
- Vehicle Tracking System Using Map-Matching Search Algorithm.Документ45 страницVehicle Tracking System Using Map-Matching Search Algorithm.Okunade Oluwafemi100% (2)
- Vehicle Tracking SystemДокумент4 страницыVehicle Tracking SystemNàGáRàJáОценок пока нет
- Android Vehicle Tracking With Speed LimitingДокумент20 страницAndroid Vehicle Tracking With Speed LimitingKaataRanjithkumar100% (1)
- Vehicle Tracking: Fleet Management Is The Management of A Company'sДокумент13 страницVehicle Tracking: Fleet Management Is The Management of A Company'sDëdy PoenyaОценок пока нет
- Automatic Vehicle LocatorДокумент7 страницAutomatic Vehicle LocatorPravallika RepanaОценок пока нет
- Track vehicles with GPS-based monitoringДокумент82 страницыTrack vehicles with GPS-based monitoringgsrawat123Оценок пока нет
- Akash Chaudhary ReportДокумент10 страницAkash Chaudhary ReportAki ChaudharyОценок пока нет
- Foreign Literature (Edit)Документ7 страницForeign Literature (Edit)John Eric Cuerdo Dagos0% (2)
- Synopsis FINAMLДокумент18 страницSynopsis FINAMLAki ChaudharyОценок пока нет
- DeeptiДокумент40 страницDeeptiVini VinayОценок пока нет
- What Is Vehicle Tracking?Документ3 страницыWhat Is Vehicle Tracking?naanthaanda123Оценок пока нет
- GPS-GSM Vehicle Tracking System ReviewДокумент3 страницыGPS-GSM Vehicle Tracking System Reviewporfy2Оценок пока нет
- AutomobiletrackingsystemДокумент35 страницAutomobiletrackingsystemNavin H YadavОценок пока нет
- Iaetsd Vehicle Monitoring and Security SystemДокумент3 страницыIaetsd Vehicle Monitoring and Security SystemiaetsdiaetsdОценок пока нет
- Logistics and Transport ManagementДокумент15 страницLogistics and Transport ManagementAndrei Horhoianu100% (1)
- 1 3Документ11 страниц1 3factorialОценок пока нет
- Intelligent Vehicle Control Using Wireless Embedded System in Transportation System Based On GSM and GPS TechnologyДокумент15 страницIntelligent Vehicle Control Using Wireless Embedded System in Transportation System Based On GSM and GPS TechnologyJubin JainОценок пока нет
- IRJMETS384009-Fleet ManagementДокумент7 страницIRJMETS384009-Fleet ManagementAnupama JawaleОценок пока нет
- Multi Tracking System: Sameer Darekar, Atul ChikaneДокумент3 страницыMulti Tracking System: Sameer Darekar, Atul ChikaneSameer DarekarОценок пока нет
- A Low-Cost Microcontroller-Based Weather Monitoring SystemДокумент43 страницыA Low-Cost Microcontroller-Based Weather Monitoring SystemChirag MistryОценок пока нет
- Design and Implementation of Vehicle Tracking System Using GPSGSMGPRS Technology and Smartphone ApplicationДокумент6 страницDesign and Implementation of Vehicle Tracking System Using GPSGSMGPRS Technology and Smartphone ApplicationSanjay Sahai100% (1)
- Vehicle Theft Detection and Tracking Using ArduinoДокумент33 страницыVehicle Theft Detection and Tracking Using ArduinoDominic Ross JosolОценок пока нет
- Submitted To-Submitted byДокумент4 страницыSubmitted To-Submitted bydeepkamal_jaiswalОценок пока нет
- Vehicle TrackingДокумент3 страницыVehicle TrackingsuneelkluОценок пока нет
- 5.4 I. FLEET MANAGEMENTДокумент4 страницы5.4 I. FLEET MANAGEMENTMartha KalenziОценок пока нет
- .Vehicle Tracking With Geo Fencing On Android PlatformДокумент4 страницы.Vehicle Tracking With Geo Fencing On Android PlatformHakiem HalimОценок пока нет
- Vehicle Monitoring and Security SystemДокумент5 страницVehicle Monitoring and Security SystemKavin Mahesh KavinОценок пока нет
- IOT Based Real-Time Vehicle Tracking SystemДокумент6 страницIOT Based Real-Time Vehicle Tracking SystemPavan VОценок пока нет
- Accident DetectionДокумент35 страницAccident DetectionAlmubeenОценок пока нет
- Predicting The Bus Arrival Time Using GPS and GSM TechnologyДокумент5 страницPredicting The Bus Arrival Time Using GPS and GSM TechnologyVeronica FloresОценок пока нет
- Vehicle Tracking System Using GPS-GSM Accident Detection and Theft SecurityДокумент8 страницVehicle Tracking System Using GPS-GSM Accident Detection and Theft Securitybrryyyt.29Оценок пока нет
- Real Tie M Gps Gprs Based Vehicle Tracking SystemДокумент6 страницReal Tie M Gps Gprs Based Vehicle Tracking SystemSruthi ReddyОценок пока нет
- Bus Tracking System and Ticket Generation Using QR Technology PDFДокумент5 страницBus Tracking System and Ticket Generation Using QR Technology PDFResearch Journal of Engineering Technology and Medical Sciences (RJETM)Оценок пока нет
- Real time vehicle tracking using RFДокумент4 страницыReal time vehicle tracking using RFAbdullahОценок пока нет
- Design and Implementation of Vehicle Tracking System Using GPS/GSM/GPRS Technology and Smartphone ApplicationДокумент6 страницDesign and Implementation of Vehicle Tracking System Using GPS/GSM/GPRS Technology and Smartphone ApplicationOnyinyeeh ChidolueОценок пока нет
- Vehicle Tracking System Using GPS and Android OSДокумент5 страницVehicle Tracking System Using GPS and Android OSshobanraj1995Оценок пока нет
- Intro: Global Navigation Satellite System Location United StatesДокумент11 страницIntro: Global Navigation Satellite System Location United StatesVirendra GuptaОценок пока нет
- A Smart Bus Tracking System Based On Location-Aware Services and QR Codes 4Документ5 страницA Smart Bus Tracking System Based On Location-Aware Services and QR Codes 4Amanuel SeidОценок пока нет
- Advance Transportation Technology in Vehicular Ad-Hoc Network-IJAERDV04I0272219Документ4 страницыAdvance Transportation Technology in Vehicular Ad-Hoc Network-IJAERDV04I0272219Editor IJAERDОценок пока нет
- A Geographic Information System (GIS), or Geographical Information System, Is Any System That Captures, Stores, Analyzes, Manages, and Presents Data That Are Linked To LocationДокумент12 страницA Geographic Information System (GIS), or Geographical Information System, Is Any System That Captures, Stores, Analyzes, Manages, and Presents Data That Are Linked To LocationDonaldTonyОценок пока нет
- Research Paper On Vehicle Tracking SystemДокумент6 страницResearch Paper On Vehicle Tracking Systemixevojrif100% (1)
- GPS Tracking SystemДокумент2 страницыGPS Tracking SystemalokОценок пока нет
- Geofencing For Fleet & Freight ManagementДокумент4 страницыGeofencing For Fleet & Freight ManagementAlejandro TiqueОценок пока нет
- Design and Implementation of Vehicle Tracking System Using GPS GSM GPRS Technology and SmartphoneДокумент6 страницDesign and Implementation of Vehicle Tracking System Using GPS GSM GPRS Technology and SmartphoneAshutosh FalegaonkarОценок пока нет
- Geotelematics: Telematics Is An Interdisciplinary Field That Encompasses TelecommunicationsДокумент30 страницGeotelematics: Telematics Is An Interdisciplinary Field That Encompasses TelecommunicationsDeeksha ChaturvediОценок пока нет
- Ambulance Management System Using GISДокумент5 страницAmbulance Management System Using GISJayanath Buddhika LiyanageОценок пока нет
- AReviewonGSMandGPSBasedVehicleTrackingSystemДокумент4 страницыAReviewonGSMandGPSBasedVehicleTrackingSystemاحمد نديم اسماعيلОценок пока нет
- Automotive Navigation SystemsДокумент15 страницAutomotive Navigation SystemsVarun GanapathyОценок пока нет
- ICAICTA.2016.7803080 VTDДокумент6 страницICAICTA.2016.7803080 VTDMd SazzadОценок пока нет
- Web Based Bus Tracking SystemДокумент4 страницыWeb Based Bus Tracking SystemKrishna EelaОценок пока нет
- Application of GPS in Vehicular Traffic Management AssignmentДокумент12 страницApplication of GPS in Vehicular Traffic Management AssignmentVijisha SahooОценок пока нет
- A Node MCU and NEO 7M GPS Module Based Bus Tracking System For College BusesДокумент5 страницA Node MCU and NEO 7M GPS Module Based Bus Tracking System For College BusesGRD JournalsОценок пока нет
- "On Track": Let Us Secure UДокумент30 страниц"On Track": Let Us Secure UHak FordОценок пока нет
- 10.1.1.462.5859.pdf ProbesДокумент8 страниц10.1.1.462.5859.pdf ProbesEdislande CostaОценок пока нет
- Research of Vehicle Tracking (VTracking App)Документ7 страницResearch of Vehicle Tracking (VTracking App)sailesh wankarОценок пока нет
- Advanced Transport Management SystemДокумент3 страницыAdvanced Transport Management SystemEditor IJRITCCОценок пока нет
- Automatic Number Plate Recognition: Fundamentals and ApplicationsОт EverandAutomatic Number Plate Recognition: Fundamentals and ApplicationsОценок пока нет
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryОт EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryОценок пока нет
- Moving Forward: GIS for TransportationОт EverandMoving Forward: GIS for TransportationTerry BillsОценок пока нет
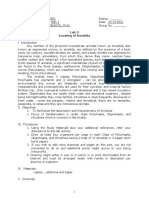
- Knowing Annelida: Earthworms, Leeches and Marine WormsДокумент4 страницыKnowing Annelida: Earthworms, Leeches and Marine WormsCherry Mae AdlawonОценок пока нет
- The Study of 220 KV Power Substation Equipment DetailsДокумент90 страницThe Study of 220 KV Power Substation Equipment DetailsAman GauravОценок пока нет
- Science Section A UPSRДокумент2 страницыScience Section A UPSRvinno8556% (9)
- Workload Assessment in Railway ControlДокумент8 страницWorkload Assessment in Railway ControlbbeeОценок пока нет
- Philip Rance EAH Philo of ByzantiumДокумент3 страницыPhilip Rance EAH Philo of ByzantiumstoliОценок пока нет
- High Risk Medications in AyurvedaДокумент3 страницыHigh Risk Medications in AyurvedaRaviraj Pishe100% (1)
- Weber Grills - FinalДокумент12 страницWeber Grills - FinalDIVYANSHU SHEKHARОценок пока нет
- NASA Technical Mem Randum: E-Flutter N78Документ17 страницNASA Technical Mem Randum: E-Flutter N78gfsdg dfgОценок пока нет
- 1999 - Seismic Soil Structure Interaction in Buildings - I Analytical Aspects PDFДокумент13 страниц1999 - Seismic Soil Structure Interaction in Buildings - I Analytical Aspects PDFCesar PugsioОценок пока нет
- Procedure for safely changing LWCV assembly with torques over 30,000 ft-lbsДокумент2 страницыProcedure for safely changing LWCV assembly with torques over 30,000 ft-lbsnjava1978Оценок пока нет
- History: Ludwig Hunger: About Us: Home - Ludwig Hunger GMBHДокумент3 страницыHistory: Ludwig Hunger: About Us: Home - Ludwig Hunger GMBHPatrizio MassaroОценок пока нет
- Jual Sokkia SET 350X Total Station - Harga, Spesifikasi Dan ReviewДокумент5 страницJual Sokkia SET 350X Total Station - Harga, Spesifikasi Dan Reviewbramsalwa2676Оценок пока нет
- Medium Strength High Conductivity MaterialsДокумент37 страницMedium Strength High Conductivity MaterialsNut AssanaiОценок пока нет
- Nakshatra Exaltation DebilitationДокумент3 страницыNakshatra Exaltation DebilitationBhanu Pinnamaneni100% (1)
- Surgical InstrumentsДокумент4 страницыSurgical InstrumentsWafa L. AbdulrahmanОценок пока нет
- Versant ModifiedДокумент57 страницVersant ModifiedAryan Kharadkar100% (3)
- PC Assembly PlantДокумент19 страницPC Assembly Plantmuyenzo100% (1)
- Celiac DiseaseДокумент14 страницCeliac Diseaseapi-355698448100% (1)
- Electrical Machines Multiple Choice Questions - Mcqs - QuizДокумент10 страницElectrical Machines Multiple Choice Questions - Mcqs - Quiztooba mukhtarОценок пока нет
- Tec Relay 52GДокумент3 страницыTec Relay 52Gimmer nainggolanОценок пока нет
- Function and Euqations - Quantitative Aptitude Questions MCQДокумент4 страницыFunction and Euqations - Quantitative Aptitude Questions MCQAnonymous v5QjDW2eHxОценок пока нет
- Desiderata: by Max EhrmannДокумент6 страницDesiderata: by Max EhrmannTanay AshwathОценок пока нет
- 2290 PDFДокумент222 страницы2290 PDFmittupatel190785Оценок пока нет
- BMW Mini COoper Installation InstructionsДокумент1 страницаBMW Mini COoper Installation InstructionsEdiJonОценок пока нет
- Measuring and calculating dimensions for pipes, plates, cylinders and moreДокумент100 страницMeasuring and calculating dimensions for pipes, plates, cylinders and moreGarcia MaybelleОценок пока нет
- Three Bucket Method & Food ServiceДокумент4 страницыThree Bucket Method & Food Servicerose zandrea demasisОценок пока нет
- SDE1 V1 G2 H18 L P2 M8 - SpecificationsДокумент1 страницаSDE1 V1 G2 H18 L P2 M8 - SpecificationsCleverson SoaresОценок пока нет
- State of The Art Penelitian - Chat GPT 2023Документ137 страницState of The Art Penelitian - Chat GPT 2023restyОценок пока нет
- Chapter 1Документ33 страницыChapter 1Salihah AbdullahОценок пока нет
- RADIATION SAFETY FUNDAMENTALSДокумент69 страницRADIATION SAFETY FUNDAMENTALSJay Lawson100% (1)