Вам также может понравиться
- Circuito ReguladorДокумент13 страницCircuito ReguladorBruno Arruda100% (1)
- Guia MErlinGerinДокумент52 страницыGuia MErlinGerinAllan Felipe Bueno ZemОценок пока нет
- Et 2907 PDFДокумент98 страницEt 2907 PDFtiago_bergonse100% (1)
- Artigo Transformadores NBIДокумент6 страницArtigo Transformadores NBIdiogoufrn-1100% (1)
- IOPES - 2014 - Tabela de Honorários de Projetos PDFДокумент5 страницIOPES - 2014 - Tabela de Honorários de Projetos PDFEduardo Godoy Pignaton100% (1)
- Catalogo Eletrocalhas EletropolДокумент29 страницCatalogo Eletrocalhas EletropolLeonardo Calheiros RodriguesОценок пока нет
- Ed 127 - Fasciculo - Cap VIII Curto Circuito para A Seletividade PDFДокумент7 страницEd 127 - Fasciculo - Cap VIII Curto Circuito para A Seletividade PDFLuiz Philippe Milioni Dos Santos100% (1)
- CAP2 Faltas SimétricasДокумент30 страницCAP2 Faltas SimétricasLuis Eduardo100% (1)
- Curvas P-V ArtigoДокумент2 страницыCurvas P-V ArtigoAntero Gonçalves100% (1)
- Sequencia PositivaДокумент16 страницSequencia PositivaMikoian Rios RiosОценок пока нет
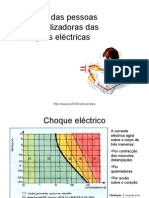
- Protecção Das Pessoas Nas Instalações EléctricasДокумент17 страницProtecção Das Pessoas Nas Instalações EléctricasJosé Ribeiro100% (1)
- Física - Indução EletromagnéticaДокумент8 страницFísica - Indução EletromagnéticaMateusCoFloОценок пока нет
- Ed 121 Fasciculo Cap II Curto Circuito para A SeletividadeДокумент6 страницEd 121 Fasciculo Cap II Curto Circuito para A SeletividadeMarlize VoigtlaenderОценок пока нет
- Transformadores para InstrumentosДокумент37 страницTransformadores para InstrumentosCarlos Damasceno MateusОценок пока нет
- Eletrocalhas RimafelДокумент5 страницEletrocalhas Rimafeldinnhow100% (1)
- Problemas de ETE - Sistemas Elétricos de Proteção e Segurança em EdificaçõesДокумент12 страницProblemas de ETE - Sistemas Elétricos de Proteção e Segurança em EdificaçõesRaphael VieiraОценок пока нет
- Exemplo de Cálculo de Curto-CircuitoДокумент28 страницExemplo de Cálculo de Curto-Circuitojpbn1100% (1)
- Fluxo de CargaДокумент52 страницыFluxo de CargaChepepeBlaisse100% (1)
- 5 Dispositivos de ProteçãoДокумент37 страниц5 Dispositivos de ProteçãoRaphael LuizОценок пока нет
- 3 - Transformadores de Corrente e TensaoДокумент41 страница3 - Transformadores de Corrente e TensaoScribdHJОценок пока нет
- Curso Express VE - Parte 1Документ39 страницCurso Express VE - Parte 1Eduardo Vaz RibeiroОценок пока нет
- Param 50-51 PDFДокумент8 страницParam 50-51 PDFFelipeOliveiraОценок пока нет
- Portaria N° 129 de 2022 - Mini DisjuntorДокумент60 страницPortaria N° 129 de 2022 - Mini DisjuntorGian Lucas DouradoОценок пока нет
- Prevenção de Falhas em Transformadores de Corrente Através Do Monitoramento Da IsolaçãoДокумент12 страницPrevenção de Falhas em Transformadores de Corrente Através Do Monitoramento Da IsolaçãoWellington LimaОценок пока нет
- Laudo Comissionamento ReferenciaДокумент188 страницLaudo Comissionamento ReferenciaIury PradoОценок пока нет
- Aula 11 Análise de Sistemas de Potência - Introdução À Proteção de SEPДокумент44 страницыAula 11 Análise de Sistemas de Potência - Introdução À Proteção de SEPFelipe Vasconcellos100% (3)
- Máquinas Elétricas e Transformadores - Kosow, Vol. 1 - 1982Документ689 страницMáquinas Elétricas e Transformadores - Kosow, Vol. 1 - 1982JhonattaDaSilvaEspinaОценок пока нет
- Apresentação Protecção de Instalações em BTWEBINARFEV2022Документ66 страницApresentação Protecção de Instalações em BTWEBINARFEV2022Rui Cruz100% (1)
- Capacitância e Indutância para Linhas de TransmissãoДокумент19 страницCapacitância e Indutância para Linhas de TransmissãoRafael100% (1)
- Ajuste 50 51 No Rele Areva Amaury Rafael LopesДокумент12 страницAjuste 50 51 No Rele Areva Amaury Rafael LopesAmaury Rios100% (1)
- Curso Sobre Medicao Fasorial Teoria e PraticaДокумент52 страницыCurso Sobre Medicao Fasorial Teoria e Praticaodenir_rodОценок пока нет
- AV I E AnalogicaДокумент6 страницAV I E Analogicacarlos mendesОценок пока нет
- Qualidade de Energia - Causas, Efeitos e SoluçõesДокумент12 страницQualidade de Energia - Causas, Efeitos e SoluçõesEudes AbreuОценок пока нет
- Manual para Escolha e Instalação de TransformadoresДокумент7 страницManual para Escolha e Instalação de TransformadoresJonas da Silva100% (1)
- Ed67 Fasc Aterramento Cap8 PDFДокумент5 страницEd67 Fasc Aterramento Cap8 PDFJeferson CorreiaОценок пока нет
- Proteção Do Sistema Elétrico de Potência - Aula 3Документ84 страницыProteção Do Sistema Elétrico de Potência - Aula 3Wemerson Rocha FerreiraОценок пока нет
- Norma Transf PotênciaДокумент59 страницNorma Transf Potênciasergiolec2k8Оценок пока нет
- Transformador de Corrente - TCДокумент13 страницTransformador de Corrente - TCRonaldo PereiraОценок пока нет
- Calculo de Barramentos RígidosДокумент85 страницCalculo de Barramentos RígidossencorsОценок пока нет
- 4 - Protecao de Linhas Por Meio de Reles de SobrecorrenteДокумент23 страницы4 - Protecao de Linhas Por Meio de Reles de Sobrecorrentepedropedroso18Оценок пока нет
- Proteção de Banco de CapacitoresДокумент7 страницProteção de Banco de CapacitoresRenato BatistaОценок пока нет
- Aula 4 PROTECAO ALIMENTADORES Prot Sist Distr PDFДокумент45 страницAula 4 PROTECAO ALIMENTADORES Prot Sist Distr PDFIgor CapeloОценок пока нет
- Lista Geral Normas - EngenhariaДокумент10 страницLista Geral Normas - EngenhariaOctavioCiconeОценок пока нет
- Coordenação de Proteção de Sistemas de Distribuição Através de Elos FusíveisДокумент9 страницCoordenação de Proteção de Sistemas de Distribuição Através de Elos Fusíveisfdiniz2009Оценок пока нет
- TRANSFORMADORES ApresentaçãoДокумент95 страницTRANSFORMADORES ApresentaçãoGuilherme Vasco100% (1)
- Arteche CT Reles-Disparo PT PDFДокумент28 страницArteche CT Reles-Disparo PT PDFFulgore CiborgueОценок пока нет
- Lista de Questões Sobre Disjuntores e Equipamentos ElétricosДокумент2 страницыLista de Questões Sobre Disjuntores e Equipamentos ElétricosAnanda CarvalhoОценок пока нет
- Trabalho de Subestação PDFДокумент6 страницTrabalho de Subestação PDFFabi SouzaОценок пока нет
- Snubber para Transformadores A SecoДокумент40 страницSnubber para Transformadores A SecoTIAGO COSTAОценок пока нет
- Descarga ParciaisДокумент104 страницыDescarga ParciaisMarcelo Ferreira PontesОценок пока нет
- Memorial de CálculoДокумент21 страницаMemorial de CálculoJackson AngellОценок пока нет
- Aula 10 Apresentacao Sistemas de Protecao e ControleДокумент77 страницAula 10 Apresentacao Sistemas de Protecao e ControleJOAO VICTOR MENDES MELOОценок пока нет
- Relés Digitais - ExemploДокумент4 страницыRelés Digitais - Exemplojoa0vitorОценок пока нет
- Conceitos de Subestaaes - Fascculo 2Документ19 страницConceitos de Subestaaes - Fascculo 2Hugo MendesОценок пока нет
- História Da Engenharia No BrasilДокумент9 страницHistória Da Engenharia No Brasilfabiofpvs0% (1)
- 317 - 2835610-Rumo Ao ITA - FísicaДокумент20 страниц317 - 2835610-Rumo Ao ITA - FísicaFernando OliveiraОценок пока нет
- Exercícios de Termodinâmica (Carnot, Rankine e Entropia)Документ14 страницExercícios de Termodinâmica (Carnot, Rankine e Entropia)Fernando Oliveira100% (5)
- Vetores - Problemas ResolvidosДокумент9 страницVetores - Problemas ResolvidosLeandro Augusto Gomes100% (2)
- 40 Eletrostatica3Документ31 страница40 Eletrostatica3api-371309692% (12)
- Ica 11-3 20181001Документ94 страницыIca 11-3 20181001bmmmotaОценок пока нет
- ZF Catalogo Veicular F4000Документ32 страницыZF Catalogo Veicular F4000tradicao guinchosОценок пока нет
- Influência Do Número de Nódulos de Grafita Nas Propriedades Mecânicas Do Ferro Fundido Nodular AustemperadoДокумент116 страницInfluência Do Número de Nódulos de Grafita Nas Propriedades Mecânicas Do Ferro Fundido Nodular AustemperadoagustingrtОценок пока нет
- Pop - Seg. 12 PolicorteДокумент6 страницPop - Seg. 12 PolicorteRoberto Melo50% (2)
- Como Escolher Sua Ferramenta para Torneamento PDFДокумент438 страницComo Escolher Sua Ferramenta para Torneamento PDFEdson GordianoОценок пока нет
- Manual de Instalação, Operação e Manutenção para Motores Elétricos NovaДокумент16 страницManual de Instalação, Operação e Manutenção para Motores Elétricos NovaDeoclécio Cardoso Jr.Оценок пока нет
- Manual de Requisitos de Fornecedores 3MДокумент27 страницManual de Requisitos de Fornecedores 3MRodrigo SandОценок пока нет
- 09 Equipamentos e FerramentasДокумент8 страниц09 Equipamentos e Ferramentashelton_bsbОценок пока нет
- Manual Boas - Práticas Na ManutençãoДокумент17 страницManual Boas - Práticas Na ManutençãoWesley CruzОценок пока нет
- NBR 6137-Pisos para RevestimentoДокумент9 страницNBR 6137-Pisos para RevestimentoGustavo BarbosaОценок пока нет
- 5 - RegulamentaçãoДокумент512 страниц5 - RegulamentaçãoMarcos AntônioОценок пока нет
- Texto e Questões Caso Natura Open InnДокумент3 страницыTexto e Questões Caso Natura Open InnMidoriPitangaОценок пока нет
- CalcДокумент22 страницыCalcmesjОценок пока нет
- Resolucao Do Livro de Mecanica EstaticaДокумент35 страницResolucao Do Livro de Mecanica EstaticaAnunciação Divino100% (1)
- Slide 10 - Localização e Arranjo Fisico de InstalaçõesДокумент38 страницSlide 10 - Localização e Arranjo Fisico de InstalaçõesWilly LittigОценок пока нет
- Tabela de Códigos Siscoserv para Transmissão em LoteДокумент93 страницыTabela de Códigos Siscoserv para Transmissão em LotePriscilaSantos014Оценок пока нет
- Fispq - Propac® 800Документ13 страницFispq - Propac® 800PROQUIMICA INDÚSTRIA E COMÉRCIO DE PRODUTOS LTDA100% (1)
- Treinamento DigestorДокумент61 страницаTreinamento DigestorLuciano Alves75% (4)
- Apostila de Controle DimensionalДокумент170 страницApostila de Controle DimensionalGeison BarrosoОценок пока нет
- GD Aula 06Документ42 страницыGD Aula 06Dario Nogueira FontenelleОценок пока нет
- Desempenho Durabilidade e ManutenibilidadeДокумент34 страницыDesempenho Durabilidade e ManutenibilidadeJosé Gabriel Franco GonçalvesОценок пока нет
- Lista de Publicação ABNTДокумент3 страницыLista de Publicação ABNTDouglas PlacedinoОценок пока нет
- N-0116 - Sistema de Purga de Vapor em TubulacoesДокумент24 страницыN-0116 - Sistema de Purga de Vapor em TubulacoesGlaucio PietrobomОценок пока нет
- Xk03 Exibir Registro Mestre de Fornecedor MSRДокумент7 страницXk03 Exibir Registro Mestre de Fornecedor MSRMarcelo RodriguesОценок пока нет
- Norma Brasileira: Abnt NBR 14040-7Документ8 страницNorma Brasileira: Abnt NBR 14040-7Evandro Sturmer100% (1)
- OscilografagemДокумент3 страницыOscilografagemJeferson GomesОценок пока нет
- Apostila Moldes FatecДокумент77 страницApostila Moldes FatecDouglas MarcocciaОценок пока нет
- 05 - Continuidade de Armadura - Luvas Prensadas PDFДокумент1 страница05 - Continuidade de Armadura - Luvas Prensadas PDFThiago PasqualОценок пока нет
- Check List NR12Документ8 страницCheck List NR12Larissa FonsecaОценок пока нет
- Catalogo Tecnico RIB LOC SequenciaДокумент12 страницCatalogo Tecnico RIB LOC SequenciaLuis MoralesОценок пока нет