Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Compiling Native C/C++ Library For AndroidДокумент3 страницыCompiling Native C/C++ Library For Androidpi194043Оценок пока нет
- Dense Optical Flow Expansion Based On Polynomial Basis ApproximationДокумент12 страницDense Optical Flow Expansion Based On Polynomial Basis Approximationpi194043Оценок пока нет
- OpenVision Library Gaussian Mixture Model ImplementationДокумент5 страницOpenVision Library Gaussian Mixture Model Implementationpi194043Оценок пока нет
- Multi Class Logistic Regression Training and TestingДокумент9 страницMulti Class Logistic Regression Training and Testingpi194043Оценок пока нет
- Implementation of Discrete Hidden Markov Model For Sequence Classification in C++ Using EigenДокумент8 страницImplementation of Discrete Hidden Markov Model For Sequence Classification in C++ Using Eigenpi194043Оценок пока нет
- Markov Chain Implementation in C++ Using EigenДокумент9 страницMarkov Chain Implementation in C++ Using Eigenpi194043Оценок пока нет
- Polynomial Approximation of 2D Image Patch - Part 2Документ14 страницPolynomial Approximation of 2D Image Patch - Part 2pi194043Оценок пока нет
- 1D Kernel Density EstimationДокумент9 страниц1D Kernel Density Estimationpi194043Оценок пока нет
- Mean Shift TrackingДокумент8 страницMean Shift Trackingpi194043Оценок пока нет
- Integral Image For Computation of Mean and VarianceДокумент5 страницIntegral Image For Computation of Mean and Variancepi194043Оценок пока нет
- Merge Sort Algorithm Using HaskellДокумент6 страницMerge Sort Algorithm Using Haskellpi194043Оценок пока нет
- Fast 2D Separable Symmetric/Anti-Symmmetric ConvolutionДокумент7 страницFast 2D Separable Symmetric/Anti-Symmmetric Convolutionpi194043Оценок пока нет
- A Path Planning AlgorithmДокумент13 страницA Path Planning Algorithmpi194043100% (1)
- Quick Sort Algorithm in HaskellДокумент8 страницQuick Sort Algorithm in Haskellpi194043Оценок пока нет
- Robotics: Bug Algorithm SimulationДокумент13 страницRobotics: Bug Algorithm Simulationpi19404375% (4)
- Basic Sorting Algorithms Using Haskell - 1Документ7 страницBasic Sorting Algorithms Using Haskell - 1pi194043Оценок пока нет
- Algorithms - Inversion Count Using HaskellДокумент6 страницAlgorithms - Inversion Count Using Haskellpi194043Оценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Data Structures and Algorithms in Java 6th Edition 201 270Документ70 страницData Structures and Algorithms in Java 6th Edition 201 270longle18704Оценок пока нет
- An Improved Method For Grinding Mill Filling Measurement and TheДокумент9 страницAn Improved Method For Grinding Mill Filling Measurement and Thehasan70 sheykhiОценок пока нет
- GMAT Club Grammar BookДокумент98 страницGMAT Club Grammar Bookvinit.parkarОценок пока нет
- Final UTS-1 PDFДокумент3 страницыFinal UTS-1 PDFKritika Yadav100% (1)
- QWE Case StudyДокумент5 страницQWE Case StudyShubhendra vatsaОценок пока нет
- Le y Yang - Tiny ImageNet Visual Recognition ChallengeДокумент6 страницLe y Yang - Tiny ImageNet Visual Recognition Challengemusicalización pacíficoОценок пока нет
- Strouhal AДокумент8 страницStrouhal Asivaaero41Оценок пока нет
- Interpreting Validity Indexes For Diagnostic TestsДокумент10 страницInterpreting Validity Indexes For Diagnostic TestsJudson BorgesОценок пока нет
- Graph Homomorphisms: Open Problems: L Aszl o Lov Asz June 2008Документ10 страницGraph Homomorphisms: Open Problems: L Aszl o Lov Asz June 2008vanaj123Оценок пока нет
- Aits 2021 FT Ix Jeem.Документ16 страницAits 2021 FT Ix Jeem.Atharv AtoleОценок пока нет
- SimuPlot5 ManualДокумент25 страницSimuPlot5 Manualikorishor ambaОценок пока нет
- AgglomerationДокумент16 страницAgglomerationMusanje MartinОценок пока нет
- Draft Standard For Definitions of Terms Relating To Corona and Field Effects of Overhead Power LinesДокумент50 страницDraft Standard For Definitions of Terms Relating To Corona and Field Effects of Overhead Power Linesshuruaat2003Оценок пока нет
- Measures of Dispersion: Greg C Elvers, PH.DДокумент27 страницMeasures of Dispersion: Greg C Elvers, PH.DorchuchiОценок пока нет
- Elbow MethodДокумент18 страницElbow MethodOsmar SalvadorОценок пока нет
- The Impact of Firm Growth On Stock Returns of Nonfinancial Firms Listed On Egyptian Stock ExchangeДокумент17 страницThe Impact of Firm Growth On Stock Returns of Nonfinancial Firms Listed On Egyptian Stock Exchangealma kalyaОценок пока нет
- 9 - 28 - 0 - 0 - 40 - 5th Electrical DE&MPДокумент165 страниц9 - 28 - 0 - 0 - 40 - 5th Electrical DE&MPvijay kumar GuptaОценок пока нет
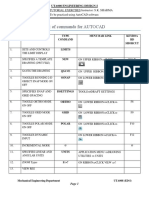
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareДокумент15 страницList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelОценок пока нет
- MA-345 NMC: 1 Root Finding MethodsДокумент5 страницMA-345 NMC: 1 Root Finding MethodsZakir HussainОценок пока нет
- A New Versatile Electronic Speckle Pattern Interferometer For VibДокумент318 страницA New Versatile Electronic Speckle Pattern Interferometer For Vibssunil7432Оценок пока нет
- Iso/ts 6336-20:2017 (E)Документ5 страницIso/ts 6336-20:2017 (E)Anirban DasОценок пока нет
- Physic Ss2 2019Документ4 страницыPhysic Ss2 2019sulayajannyОценок пока нет
- Elementary Quantitative Methods QMI1500 Semesters 1 and 2: Tutorial Letter 101/3/2021Документ26 страницElementary Quantitative Methods QMI1500 Semesters 1 and 2: Tutorial Letter 101/3/2021natashasiphokazi2015Оценок пока нет
- Optimal Agricultural Land Use: An Efficient Neutrosophic Linear Programming MethodДокумент7 страницOptimal Agricultural Land Use: An Efficient Neutrosophic Linear Programming MethodScience DirectОценок пока нет
- ME - R19 - 170 PagesДокумент170 страницME - R19 - 170 PagesKanchiSrinivasОценок пока нет
- Theory Notes of Newton's Laws of Motion For NEET & IIT 2017Документ18 страницTheory Notes of Newton's Laws of Motion For NEET & IIT 2017umved singh yadav90% (10)
- Intro To Machine Learning: Pembelajaran Mesin D4 Ti IFY IT Del 2019Документ17 страницIntro To Machine Learning: Pembelajaran Mesin D4 Ti IFY IT Del 2019Hanzel ArdeoОценок пока нет
- Chapter 11Документ12 страницChapter 11JeromeОценок пока нет
- Programmable Logic ControllersДокумент31 страницаProgrammable Logic Controllersgpz10100% (15)
- 5.2 Orthogonal Complements and ProjectionsДокумент17 страниц5.2 Orthogonal Complements and ProjectionsCostalotОценок пока нет