Вам также может понравиться
- Grupo 11 - Aumento Vertical Del Esfuerzo Debido A Distintos Tipos de CargaДокумент33 страницыGrupo 11 - Aumento Vertical Del Esfuerzo Debido A Distintos Tipos de CargajordiОценок пока нет
- Transferencia de Masa Convectiva - Fabio RangelДокумент89 страницTransferencia de Masa Convectiva - Fabio Rangelracupi3Оценок пока нет
- Analisis Dimensional 2do p3Документ2 страницыAnalisis Dimensional 2do p3Jesus Calle100% (1)
- KKT Ejercicios ResueltosДокумент8 страницKKT Ejercicios ResueltosSeba Trigo100% (1)
- Control Digital de Velocidad de Un Motor DCДокумент16 страницControl Digital de Velocidad de Un Motor DCBeatrizMontesОценок пока нет
- Los Estados de La MateriaДокумент6 страницLos Estados de La MateriaRaquel Marcos-alberca CalongeОценок пока нет
- Transistor de Inducción EstáticaДокумент12 страницTransistor de Inducción EstáticaAlxNelSonCarrascoArauco100% (2)
- Astm C42-99Документ5 страницAstm C42-99Orlando Manriquez L100% (1)
- Unidad Didactica Hidroestatica by ChuchoДокумент20 страницUnidad Didactica Hidroestatica by ChuchoJohn Alfredo Escobar EstradaОценок пока нет
- Motores Paso A Paso PDFДокумент16 страницMotores Paso A Paso PDFAnonymous f6yup1100% (1)
- Diagrama de Bode DiscretoДокумент4 страницыDiagrama de Bode DiscretoOmar Lopez Arias0% (1)
- Tem 6 Clase 3 PDFДокумент39 страницTem 6 Clase 3 PDFLau Montes0% (1)
- Control Discretizacion de Controladores y PlantasДокумент30 страницControl Discretizacion de Controladores y PlantasCharles Rhodes RhodesОценок пока нет
- Control Discreto de Motor DCДокумент6 страницControl Discreto de Motor DCharvic3Оценок пока нет
- Controladores Por RetroalimentacionДокумент16 страницControladores Por RetroalimentacionMoises MartinezОценок пока нет
- Convertidor DC Con Mc34063Документ3 страницыConvertidor DC Con Mc34063ordenador90Оценок пока нет
- Programa Control SecuencialДокумент68 страницPrograma Control SecuencialhoperilloОценок пока нет
- Teorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesДокумент4 страницыTeorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesJesus Antonio Mtz100% (2)
- AccelStepper Arduino Library, Connecting Stepper Motors To TeensyjjДокумент2 страницыAccelStepper Arduino Library, Connecting Stepper Motors To TeensyjjAnonymous e3XZzQОценок пока нет
- Contadores Digitales PDFДокумент14 страницContadores Digitales PDFErick Jesús Rodríguez DávilaОценок пока нет
- Circuito Neumatico SemiautomaticoДокумент2 страницыCircuito Neumatico SemiautomaticoArias JoseОценок пока нет
- Practicas Electro-Neumática e PLCДокумент2 страницыPracticas Electro-Neumática e PLCDiego CuzcoОценок пока нет
- Control de Motores DC Con Micro Control Adores PICДокумент8 страницControl de Motores DC Con Micro Control Adores PICPatariki Gastón Mansilla0% (1)
- Ejer PropuestosДокумент6 страницEjer PropuestosRicardo BarrionuevoОценок пока нет
- Transformada ZДокумент45 страницTransformada ZLuz666Оценок пока нет
- Guía 5 - Casos de Problemas Automatización Con PLCДокумент12 страницGuía 5 - Casos de Problemas Automatización Con PLCBilly FisherОценок пока нет
- Reporte Fuente de Voltaje (+5, +12 y - 12 Volts) .Документ13 страницReporte Fuente de Voltaje (+5, +12 y - 12 Volts) .Michel ZamoraОценок пока нет
- Unidad 5 PLCДокумент24 страницыUnidad 5 PLCSergio Buenaventura Baez0% (1)
- Sistemas de Control MIMOДокумент10 страницSistemas de Control MIMONeptaliMuñozОценок пока нет
- Transformada Z Por El Método de Los ResiduosДокумент2 страницыTransformada Z Por El Método de Los Residuosmarcos5693Оценок пока нет
- 1.1 Etapas de Un AutomatismoДокумент12 страниц1.1 Etapas de Un AutomatismoJulmarОценок пока нет
- Contador Ascendente y Descendente en VHDLДокумент12 страницContador Ascendente y Descendente en VHDLStephany BradburyОценок пока нет
- Control Digital DirectoДокумент4 страницыControl Digital DirectoCristianGabrielSanchezNazrОценок пока нет
- Problemas A 1.5Документ4 страницыProblemas A 1.5Juan Isidro De Leon GarciaОценок пока нет
- Practica 3 Banda TransportadoraДокумент6 страницPractica 3 Banda TransportadoraAby Valenzuela100% (1)
- Características y Descripción Del Módulo CCP Del MicrocontroladorДокумент2 страницыCaracterísticas y Descripción Del Módulo CCP Del MicrocontroladorCarlos HernandezОценок пока нет
- PLC Step 7 SemaforoДокумент12 страницPLC Step 7 SemaforoRafaVolksОценок пока нет
- Manejo de Punto Flotante en Pic Basic Pro PlusДокумент14 страницManejo de Punto Flotante en Pic Basic Pro PlusFatality Joseph100% (1)
- Control de Velocidad de Un Motor Dahlander - Aplicacion A Los Plcs MomentumДокумент6 страницControl de Velocidad de Un Motor Dahlander - Aplicacion A Los Plcs MomentumElizabethОценок пока нет
- Practica 2 Máquinas de EstadoДокумент27 страницPractica 2 Máquinas de EstadoEdgar MartinezОценок пока нет
- Circuitos de Disparo R, RC y Doble RC (Recuperado Automáticamente)Документ6 страницCircuitos de Disparo R, RC y Doble RC (Recuperado Automáticamente)Ednna Lp100% (1)
- ElectroneumaticaДокумент16 страницElectroneumaticaFelix RomeroОценок пока нет
- Proyectos para Realizar Con PLCДокумент10 страницProyectos para Realizar Con PLCgrome grmeОценок пока нет
- SPWM Con PicДокумент2 страницыSPWM Con PicJef Marin0% (1)
- Analisis de Sistemas en El Espacio de Estados.Документ7 страницAnalisis de Sistemas en El Espacio de Estados.Paul Guillen100% (2)
- Unidad 1 Contro ElectricoДокумент26 страницUnidad 1 Contro ElectricoRuben Alvarez100% (1)
- Arquitectura de Redes PropietariasДокумент44 страницыArquitectura de Redes PropietariasandrlarcОценок пока нет
- Practica Unidad 3Документ14 страницPractica Unidad 3JARED NAVARRETE CARRASCOОценок пока нет
- Exposicion CD CDДокумент2 страницыExposicion CD CDfabbynandaОценок пока нет
- Modelo Robot BalancinДокумент8 страницModelo Robot BalancinKevin E. Godinez OrtizОценок пока нет
- Practica 7 Disparo SCRДокумент6 страницPractica 7 Disparo SCREnrique GarciaОценок пока нет
- Controlador Pid AscensorДокумент20 страницControlador Pid AscensorAlbert Willy100% (2)
- Labvolt GuiaДокумент6 страницLabvolt GuiaWilsonОценок пока нет
- Dinamica de Un Motor DC en Tiempo DiscretoДокумент3 страницыDinamica de Un Motor DC en Tiempo DiscretoIsaias FloCaОценок пока нет
- Reporte Practica #2Документ14 страницReporte Practica #2SylvIa RosalesОценок пока нет
- Laboratorio 1 Control IndustrialДокумент13 страницLaboratorio 1 Control IndustrialelianОценок пока нет
- Sistema de Automatizacion S7 200Документ478 страницSistema de Automatizacion S7 200Jhonny Zambrano SaavedraОценок пока нет
- Control de Fase DirectoДокумент30 страницControl de Fase DirectoAbiel RosaОценок пока нет
- Control Digital de Velocidad de Un Motor DCДокумент16 страницControl Digital de Velocidad de Un Motor DCLuis Enrique Zapata Valenzuela100% (1)
- Rectificador de Onda Completa Carga RLДокумент27 страницRectificador de Onda Completa Carga RLtronchesОценок пока нет
- Control Motor DC Open LoopДокумент10 страницControl Motor DC Open Loopcompras biciОценок пока нет
- PRACTICA 9 - Servo - MotorДокумент5 страницPRACTICA 9 - Servo - Motormanu_arjeОценок пока нет
- Modelado de Sistemas de Potencia Con MATLABДокумент37 страницModelado de Sistemas de Potencia Con MATLABharoldОценок пока нет
- Controlador Pid AscensorДокумент15 страницControlador Pid AscensoralbertwillyОценок пока нет
- Informe Tecnico de Sistema Motriz de Mezcladora RevДокумент5 страницInforme Tecnico de Sistema Motriz de Mezcladora RevLuis AvilaОценок пока нет
- 0fa (EPS-ing) .En - EsДокумент17 страниц0fa (EPS-ing) .En - EsJose Antonio IglesiaОценок пока нет
- Problemas de Maquinaria Electrica IIДокумент70 страницProblemas de Maquinaria Electrica IIHolguer NoriegaОценок пока нет
- Prueba en MotoresДокумент14 страницPrueba en MotoresJorge CardenasОценок пока нет
- Circular Rectoria No 004-3Документ2 страницыCircular Rectoria No 004-3antonyglzОценок пока нет
- Listado de Asistencia - PMLD (1-13)Документ5 страницListado de Asistencia - PMLD (1-13)antonyglzОценок пока нет
- Caso-Constructora AHG-seccion1-tema1Документ2 страницыCaso-Constructora AHG-seccion1-tema1antonyglzОценок пока нет
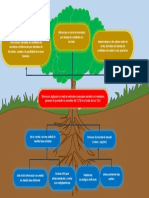
- Diagrama Arbol de ProblemaДокумент1 страницаDiagrama Arbol de ProblemaantonyglzОценок пока нет
- Taller 1Документ2 страницыTaller 1antonyglzОценок пока нет
- CMC-F-217 Formato de Plan de Trabajo SarlaftДокумент4 страницыCMC-F-217 Formato de Plan de Trabajo SarlaftantonyglzОценок пока нет
- Actividad EOQ-AntonyGonzalezДокумент5 страницActividad EOQ-AntonyGonzalezantonyglzОценок пока нет
- Taller 02-Seccion No.2Документ1 страницаTaller 02-Seccion No.2antonyglzОценок пока нет
- Taller - SeccionNo.1Документ1 страницаTaller - SeccionNo.1antonyglzОценок пока нет
- Qué Es El Efecto LátigoДокумент5 страницQué Es El Efecto LátigoantonyglzОценок пока нет
- Diseño Mecanico IIДокумент11 страницDiseño Mecanico IIIvanJairGonzalezBautistaОценок пока нет
- Guía 1Документ5 страницGuía 1ANDRES GARCIA33% (3)
- Fuerza Electromotriz Inducida en Una Maquina Elemental de Corriente AlternaДокумент7 страницFuerza Electromotriz Inducida en Una Maquina Elemental de Corriente AlternaOscar RoblesОценок пока нет
- Pre-Informe Sublimacion y Punto de FusionДокумент4 страницыPre-Informe Sublimacion y Punto de FusionEllenFigueroaCastroОценок пока нет
- P2 01 eДокумент32 страницыP2 01 eRuth Villanueva Palomino0% (1)
- Esta Di SticaДокумент5 страницEsta Di SticaMAXIMILIANO CONDOR HUAMÁNОценок пока нет
- Tema 1 (David Quimica)Документ15 страницTema 1 (David Quimica)David Gsus VilОценок пока нет
- Caracterizacion de Propiedades FQ Textura Microbilogia de ButifarraДокумент6 страницCaracterizacion de Propiedades FQ Textura Microbilogia de Butifarraelita elizabeth medina torresОценок пока нет
- Perdida de CargaДокумент12 страницPerdida de CargaGrindaSierraОценок пока нет
- Sistema Pseudo-Cuaternario Monoglicéridos + Diglicéridos + Triglicéridos + CO2Документ8 страницSistema Pseudo-Cuaternario Monoglicéridos + Diglicéridos + Triglicéridos + CO2lizeth_burgos_5Оценок пока нет
- Formato de Prácticas Calificada #4Документ2 страницыFormato de Prácticas Calificada #4tennajroxОценок пока нет
- Ventilacion en Cuarto de TransformadoresДокумент3 страницыVentilacion en Cuarto de Transformadorescarlos_solano11Оценок пока нет
- José Estuardo Galindo Escobar PDFДокумент151 страницаJosé Estuardo Galindo Escobar PDFBrando Edu Reyes LoayzaОценок пока нет
- Anderson, Poul - Sin Mundo PropioДокумент168 страницAnderson, Poul - Sin Mundo Propioaromero888Оценок пока нет
- Olga LadýzhenskayaДокумент2 страницыOlga LadýzhenskayaeeqdОценок пока нет
- Ampliación Física - y - Química - 4eso - 2012 - 2013.Документ26 страницAmpliación Física - y - Química - 4eso - 2012 - 2013.beatrizjm9314Оценок пока нет
- Inf. ElectroquimicaДокумент11 страницInf. ElectroquimicaJonathan Velásquez0% (1)
- Tesis Final Cenizas de CarbonДокумент64 страницыTesis Final Cenizas de CarbonrosarioОценок пока нет
- Laboratorio de Fisica 14Документ12 страницLaboratorio de Fisica 14Jesús Molina CastroОценок пока нет
- Guia de Arquitectura BioclimáticaДокумент19 страницGuia de Arquitectura BioclimáticaGuadalupe IhcОценок пока нет
- Hormigones Con FibrasДокумент36 страницHormigones Con FibrasantoninoОценок пока нет
- SaturacionДокумент46 страницSaturacionjose floresОценок пока нет