Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- 04 - Second-Order Effects On MOSFET Small Signal ModelДокумент27 страниц04 - Second-Order Effects On MOSFET Small Signal ModelWinnie LahОценок пока нет
- Tuv Rheinland Bifacial Photovoltaic Modules and SystemsДокумент166 страницTuv Rheinland Bifacial Photovoltaic Modules and SystemsDavid GarciaОценок пока нет
- Cycloaliphatic Epoxy ResinДокумент6 страницCycloaliphatic Epoxy ResinAdhyartha KerafОценок пока нет
- 555 Timer As Monostable MultivibratorДокумент5 страниц555 Timer As Monostable MultivibratorDarshan BhansaliОценок пока нет
- BДокумент7 страницBrajbir kaurОценок пока нет
- CT Saturation TutorialДокумент44 страницыCT Saturation TutorialRajesh Bodduna100% (1)
- 9 MultimeterДокумент8 страниц9 MultimeterrameshОценок пока нет
- UVtron TPT1021E PDFДокумент4 страницыUVtron TPT1021E PDFAgam ArlandoОценок пока нет
- Concepts of EarthingДокумент6 страницConcepts of EarthingKonda SrinivasОценок пока нет
- Modern Semiconductor Devices For Integrated Circuits 1st Edition Hu Solutions ManualДокумент19 страницModern Semiconductor Devices For Integrated Circuits 1st Edition Hu Solutions Manualorianahilaryic3u1s100% (21)
- An Injection LockedДокумент11 страницAn Injection LockedMANNE SAHITHIОценок пока нет
- Multiple Choice Questions of Electric Current and OhmДокумент11 страницMultiple Choice Questions of Electric Current and OhmVanaVihari DasОценок пока нет
- Materials Chemistry B: Journal ofДокумент32 страницыMaterials Chemistry B: Journal ofpriyaОценок пока нет
- 027-2042 GP5 Technical ManualДокумент108 страниц027-2042 GP5 Technical ManualisraelmlОценок пока нет
- Cascode Amplifier: Exp - No: 5 Date: 20-9-2021Документ9 страницCascode Amplifier: Exp - No: 5 Date: 20-9-2021annambaka satishОценок пока нет
- GBTX ManualДокумент200 страницGBTX Manualtoniko01Оценок пока нет
- 900 Series Installation v5-1 (English)Документ44 страницы900 Series Installation v5-1 (English)Katneza Katman MohlalaОценок пока нет
- Electrical Power Exam #1Документ4 страницыElectrical Power Exam #1Jose C. Lita JrОценок пока нет
- Cambridge Secondary One Science: Chapter 6: Material PropertiesДокумент14 страницCambridge Secondary One Science: Chapter 6: Material PropertiesEric ChewОценок пока нет
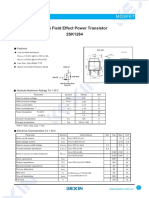
- Datasheet Transistor 2SK1284Документ1 страницаDatasheet Transistor 2SK1284Nayla AzzahraОценок пока нет
- M54/74HC299/323 8-Bit Shift Registers DatasheetДокумент16 страницM54/74HC299/323 8-Bit Shift Registers Datasheetagus satyaОценок пока нет
- Operational Amplifiers: Basic Building Block Black BoxДокумент27 страницOperational Amplifiers: Basic Building Block Black BoxAyesha GuptaОценок пока нет
- Advanced ASIC Chip Synthesis Using Synopsys Design CompilerДокумент5 страницAdvanced ASIC Chip Synthesis Using Synopsys Design CompilerKartik SamtaniОценок пока нет
- UHF Power MOS Transistor: Important NoticeДокумент16 страницUHF Power MOS Transistor: Important NoticexoxovasОценок пока нет
- Signs of DNA Origami Self AssemblyДокумент14 страницSigns of DNA Origami Self AssemblytrashbinfoodieОценок пока нет
- Av02 0717en - DS - HCPL 316J - 2015 03 090Документ32 страницыAv02 0717en - DS - HCPL 316J - 2015 03 090Justine ManningОценок пока нет
- 108 PDFДокумент28 страниц108 PDFcoulibalyoumarОценок пока нет
- Samsung Pg17n, Pg19n Service ManualДокумент85 страницSamsung Pg17n, Pg19n Service ManualAZAD MATUBBERОценок пока нет
- AE Diode TheoryДокумент8 страницAE Diode Theoryprafulla patilОценок пока нет
- Trupti 456Документ4 страницыTrupti 456Vaibhavi KocheОценок пока нет