Вам также может понравиться
- Producto Escalar (Producto Punto)Документ26 страницProducto Escalar (Producto Punto)AMYNNXXXX75% (8)
- Vectores en El Espacio TridimensionalДокумент23 страницыVectores en El Espacio TridimensionalAMYNNXXXX50% (2)
- Funciones Vectoriales y CurvasДокумент15 страницFunciones Vectoriales y CurvasAMYNNXXXXОценок пока нет
- Ecuaciones Diferenciales Con Coeficientes LinealesДокумент17 страницEcuaciones Diferenciales Con Coeficientes LinealesAMYNNXXXX100% (3)
- Ecuaciones Diferenciales de BernoulliДокумент7 страницEcuaciones Diferenciales de BernoulliAMYNNXXXX75% (4)
- Planos y RectasДокумент29 страницPlanos y RectasAMYNNXXXXОценок пока нет
- Vectores en El PlanoДокумент17 страницVectores en El PlanoAMYNNXXXXОценок пока нет
- Aplicaciones de Máximos y Mínimos de Funciones de Dos VariablesДокумент13 страницAplicaciones de Máximos y Mínimos de Funciones de Dos VariablesAMYNNXXXX100% (8)
- Ecuaciones Diferenciales de RicattiДокумент4 страницыEcuaciones Diferenciales de RicattiAMYNNXXXX100% (3)
- Multiplicadores de LagrangeДокумент24 страницыMultiplicadores de LagrangeAMYNNXXXX100% (3)
- Planos Tangentes Rectas Normales A La SuperficieДокумент18 страницPlanos Tangentes Rectas Normales A La SuperficieAMYNNXXXX90% (10)
- Ecuaciones Diferenciales ExactasДокумент19 страницEcuaciones Diferenciales ExactasAMYNNXXXX100% (2)
- Ecuaciones Diferenciales Exactas Con Factor IntegranteДокумент17 страницEcuaciones Diferenciales Exactas Con Factor IntegranteAMYNNXXXX43% (7)
- Ecuaciones Diferenciales HomogeneasДокумент16 страницEcuaciones Diferenciales HomogeneasAMYNNXXXX50% (6)
- Teoremas de Funciones TrascendentalesДокумент29 страницTeoremas de Funciones TrascendentalesAMYNNXXXXОценок пока нет
- Funciones de Varias VariablesДокумент17 страницFunciones de Varias VariablesAMYNNXXXXОценок пока нет
- Ecuaciones Diferenciales LinealesДокумент14 страницEcuaciones Diferenciales LinealesAMYNNXXXX100% (2)
- Gradientes y Derivadas DireccionalesДокумент20 страницGradientes y Derivadas DireccionalesAMYNNXXXX86% (7)
- HIPÉRBOLASДокумент24 страницыHIPÉRBOLASAMYNNXXXX67% (3)
- Límites y ContinuidadДокумент33 страницыLímites y ContinuidadAMYNNXXXX100% (1)
- HiperbolaДокумент12 страницHiperbolaDaniel SotoОценок пока нет
- Derivación Por Regla de La CadenaДокумент26 страницDerivación Por Regla de La CadenaAMYNNXXXX89% (9)
- Identidades TrigonométricasДокумент22 страницыIdentidades TrigonométricasAMYNNXXXXОценок пока нет
- PROBABILIDADДокумент26 страницPROBABILIDADAMYNNXXXXОценок пока нет
- La ElipseДокумент16 страницLa ElipseAMYNNXXXXОценок пока нет
- Ley de Senos y de CosenosДокумент19 страницLey de Senos y de CosenosAMYNNXXXXОценок пока нет
- La ElipseДокумент24 страницыLa ElipseAMYNNXXXXОценок пока нет
- Sistema de Coordenadas Rectangulares o CartesianasДокумент29 страницSistema de Coordenadas Rectangulares o CartesianasAMYNNXXXX0% (1)
- Definición de Una RectaДокумент15 страницDefinición de Una RectaAMYNNXXXXОценок пока нет
- Funciones Trigonométricas InversasДокумент7 страницFunciones Trigonométricas InversasAMYNNXXXXОценок пока нет
- Lección 1 Temas de Filosofía.Документ3 страницыLección 1 Temas de Filosofía.BRENDA ROMERO JIM�NEZОценок пока нет
- T3 Apuntes Arte Románico Historia Del ArteДокумент16 страницT3 Apuntes Arte Románico Historia Del Arteaad.iesalbalОценок пока нет
- Equipamiento para El Consultorio de Medicina GeneralДокумент4 страницыEquipamiento para El Consultorio de Medicina GeneralAlejandraОценок пока нет
- Vicios de DiccionДокумент13 страницVicios de DiccionAlfredo Arango EscobarОценок пока нет
- Control Calidad1Документ7 страницControl Calidad1CrisОценок пока нет
- La Literatura SapiencialДокумент21 страницаLa Literatura SapiencialMarco Antonio Limunao PurránОценок пока нет
- Proyecto ContabilidadgerencialДокумент32 страницыProyecto ContabilidadgerencialWendy MtzОценок пока нет
- Los 7 Sellos ApocaliticosДокумент35 страницLos 7 Sellos ApocaliticosSanto De La CruzОценок пока нет
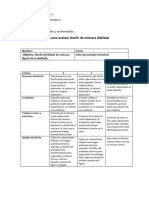
- Rubrica para Evaluar Diseño de MascaraДокумент1 страницаRubrica para Evaluar Diseño de MascaraLizbeth Alva GamarraОценок пока нет
- Album Palabras Verano PDFДокумент14 страницAlbum Palabras Verano PDFMaria Gallart AlvarezОценок пока нет
- Promocionar El Servidor A Controlador de Dominio ACTIVE DIRECTORYДокумент17 страницPromocionar El Servidor A Controlador de Dominio ACTIVE DIRECTORYDaniel Banyam MarquezОценок пока нет
- Practica 6 Ruta Estatica ConfiguracionДокумент31 страницаPractica 6 Ruta Estatica ConfiguracionCarlos Danniel FloresОценок пока нет
- 004 Informe Final 2023Документ2 страницы004 Informe Final 2023Melisa JAОценок пока нет
- Desyodasas Resumen ArticuloДокумент1 страницаDesyodasas Resumen ArticuloMaribel Thalia Valderrama BacilioОценок пока нет
- Mandalas TDHДокумент74 страницыMandalas TDHMaria Isabel Marval100% (1)
- Plan de Trabajo AC 1Документ5 страницPlan de Trabajo AC 1Gina Thalia De La Cruz HuamaniОценок пока нет
- Mecanismos de Desplazamiento de Fluidos en El YacimientoДокумент7 страницMecanismos de Desplazamiento de Fluidos en El YacimientoJovi CooperОценок пока нет
- Sesion 25. Cavidad Oral, DientesДокумент48 страницSesion 25. Cavidad Oral, DientesMaría Fe CasañoОценок пока нет
- Informática UNOДокумент23 страницыInformática UNOManx Glez NiñoОценок пока нет
- Trifoliar CELULAS PB9 2022Документ2 страницыTrifoliar CELULAS PB9 2022JazminОценок пока нет
- EDUCACIÓN Matemática Realista (EMR)Документ38 страницEDUCACIÓN Matemática Realista (EMR)Leonor Bellido Rojas100% (1)
- Actividades Las Medias de Los FlamencosДокумент5 страницActividades Las Medias de Los FlamencosalejandraОценок пока нет
- Metodo MagneticoДокумент35 страницMetodo MagneticoSamuel P. GarcíaОценок пока нет
- Trabajo Final Corte Internacional de Justicia 1Документ34 страницыTrabajo Final Corte Internacional de Justicia 1Julia Gomez GalindoОценок пока нет
- La Vida de Los MamíferosДокумент1 страницаLa Vida de Los MamíferosJuan PerezОценок пока нет
- Proceso Levantamiento Riesgos Psicosociales FRPSДокумент2 страницыProceso Levantamiento Riesgos Psicosociales FRPSsupatagonicaОценок пока нет
- 10 Idiomas Que Hablan en GuatemalaДокумент7 страниц10 Idiomas Que Hablan en GuatemalaSteven JohnОценок пока нет
- TRIÁNGULOS y Numeros EnterosДокумент8 страницTRIÁNGULOS y Numeros EnterosNorleidy CamejoОценок пока нет
- Tarea de Caso de Juana Katherin ScarlettДокумент7 страницTarea de Caso de Juana Katherin ScarlettArlet tavarezОценок пока нет
- Infografía - Fuerzas Internas de La OrganizaciónДокумент1 страницаInfografía - Fuerzas Internas de La OrganizaciónAlondraОценок пока нет