Вам также может понравиться
- Dimensiones Del Movimiento - Instituto de Investigaciones & Soluciones BiomecánicasДокумент9 страницDimensiones Del Movimiento - Instituto de Investigaciones & Soluciones BiomecánicasJose LuisОценок пока нет
- El Juego y Caracteristicas Del JuegoДокумент3 страницыEl Juego y Caracteristicas Del JuegoJose LuisОценок пока нет
- Analisis Maria Montero 5 1Документ4 страницыAnalisis Maria Montero 5 1Jose LuisОценок пока нет
- Calendario Por Semanas 2018Документ2 страницыCalendario Por Semanas 2018Jose LuisОценок пока нет
- Formacion Integral PDFДокумент3 страницыFormacion Integral PDFMario Gonzalo DuranОценок пока нет
- Deport eДокумент7 страницDeport etroconesОценок пока нет
- Formacion Integral PDFДокумент3 страницыFormacion Integral PDFMario Gonzalo DuranОценок пока нет
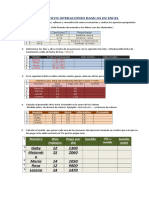
- Ejercicios Practicos Operaciones BasicasДокумент1 страницаEjercicios Practicos Operaciones BasicasJose LuisОценок пока нет
- Alfredos GutierrazДокумент12 страницAlfredos GutierrazJose LuisОценок пока нет
- Dialnet RecursosDidacticosDigitales 4781052 PDFДокумент16 страницDialnet RecursosDidacticosDigitales 4781052 PDFyamila1983Оценок пока нет
- Past PerfectДокумент3 страницыPast PerfectJose LuisОценок пока нет
- Trabajo Sistemas Operativos 2Документ9 страницTrabajo Sistemas Operativos 2Jose LuisОценок пока нет
- Cualidades Fisicas BasicasДокумент6 страницCualidades Fisicas BasicasAldo Flores LopezОценок пока нет
- Instalaciones Electricas en Viviendas PDFДокумент12 страницInstalaciones Electricas en Viviendas PDFJuliio C. MartiinezОценок пока нет
- Qué Es El ComputadorДокумент1 страницаQué Es El ComputadorJose LuisОценок пока нет
- Temáticas 2 PeriodoДокумент2 страницыTemáticas 2 PeriodoJose LuisОценок пока нет
- Clase19grficosenexcel2010 121023233427 Phpapp01Документ37 страницClase19grficosenexcel2010 121023233427 Phpapp01Itzel CardenasОценок пока нет
- PM5 4P InformaticaДокумент1 страницаPM5 4P InformaticaJose LuisОценок пока нет
- Beneficios de La Actividad FisicaДокумент2 страницыBeneficios de La Actividad FisicaJose LuisОценок пока нет
- Cómo Hacer Un Mapa Conceptual y HerramientasДокумент5 страницCómo Hacer Un Mapa Conceptual y HerramientasJose LuisОценок пока нет
- ArtisticaДокумент1 страницаArtisticaJose LuisОценок пока нет
- Importancia de Hacer DeporteДокумент3 страницыImportancia de Hacer DeporteJose LuisОценок пока нет
- Nombre Del Producto Cantidad Precio /unitario Borrador 3 200 Birome 5 800 Cuaderno 4 1200Документ3 страницыNombre Del Producto Cantidad Precio /unitario Borrador 3 200 Birome 5 800 Cuaderno 4 1200Jose LuisОценок пока нет
- Curso de Fotografia DigitalДокумент140 страницCurso de Fotografia DigitalJuliaPestarino100% (2)
- Once Hábitos de Un Profesor EfectivoДокумент3 страницыOnce Hábitos de Un Profesor EfectivoJose LuisОценок пока нет
- Plan de Mejoramiento Primer Peiodo Cuarto 2013Документ4 страницыPlan de Mejoramiento Primer Peiodo Cuarto 2013Jose LuisОценок пока нет
- Cuadernillo Saber 11 2014 PDFДокумент40 страницCuadernillo Saber 11 2014 PDFCatral Antonio33% (3)
- Once Hábitos de Un Profesor EfectivoДокумент3 страницыOnce Hábitos de Un Profesor EfectivoJose LuisОценок пока нет
- MeliponicultureДокумент1 страницаMeliponicultureJose LuisОценок пока нет
- Técnicas Del CarboncilloДокумент1 страницаTécnicas Del CarboncilloJose LuisОценок пока нет