Вам также может понравиться
- Nenuca Nenina Fisica4 Refuerzo1evaДокумент12 страницNenuca Nenina Fisica4 Refuerzo1evaFlopez LopezОценок пока нет
- Cálculo de áreas y volúmenes de cuerpos geométricosДокумент27 страницCálculo de áreas y volúmenes de cuerpos geométricosNorfelino Pacheco CarrascalОценок пока нет
- Informe #07 - Perfil Longitudinal y Secciones TransversalesДокумент50 страницInforme #07 - Perfil Longitudinal y Secciones Transversalesjesus vidal rivera montalvoОценок пока нет
- Poligonos Basico PDFДокумент5 страницPoligonos Basico PDFIromi CamposОценок пока нет
- La Perspectiva CaballeraДокумент5 страницLa Perspectiva CaballeraLiss Idk FalconОценок пока нет
- Areas UNMSMДокумент4 страницыAreas UNMSMAdolfo Povis Vega100% (2)
- Espacios de Ciudadanía Sergio TamayoДокумент12 страницEspacios de Ciudadanía Sergio TamayoAnge GueОценок пока нет
- 2017 03 2do CicloДокумент51 страница2017 03 2do CicloLola Gianisoli100% (1)
- Evaluación Trigonometría Funciones Trigonometricas GráficasДокумент6 страницEvaluación Trigonometría Funciones Trigonometricas GráficasMaria Fernanda Simonds VegaОценок пока нет
- OsosДокумент1 страницаOsosJaime SalguerroОценок пока нет
- Problema de Dos CuerposДокумент4 страницыProblema de Dos CuerposJaime SalguerroОценок пока нет
- Parcelacion DiscreteMathДокумент4 страницыParcelacion DiscreteMathJaime SalguerroОценок пока нет
- Parcial 1 - EjerciciosДокумент1 страницаParcial 1 - EjerciciosJaime SalguerroОценок пока нет
- ImagenFca 2Документ1 страницаImagenFca 2Jaime SalguerroОценок пока нет
- Parcelacion Calculo3 2018 10Документ6 страницParcelacion Calculo3 2018 10Jaime SalguerroОценок пока нет
- Imagen FcaДокумент1 страницаImagen FcaJaime SalguerroОценок пока нет
- Fem 01Документ23 страницыFem 01Jaime SalguerroОценок пока нет
- Imagen FcaДокумент1 страницаImagen FcaJaime SalguerroОценок пока нет
- Problems Ref 1 CДокумент1 страницаProblems Ref 1 CJaime SalguerroОценок пока нет
- Parcial 2 - EjerciciosДокумент1 страницаParcial 2 - EjerciciosJaime SalguerroОценок пока нет
- EP1 Discrete Math SolucionДокумент2 страницыEP1 Discrete Math SolucionJaime SalguerroОценок пока нет
- Parcelación-Teoria de GruposДокумент8 страницParcelación-Teoria de GruposJaime SalguerroОценок пока нет
- Calculo3 ReglamentoДокумент9 страницCalculo3 ReglamentoJaime SalguerroОценок пока нет
- Homework 09Документ2 страницыHomework 09Jaime SalguerroОценок пока нет
- Parcial 3 - EjerciciosДокумент1 страницаParcial 3 - EjerciciosJaime SalguerroОценок пока нет
- Calculo3 Sleids Semana 01Документ34 страницыCalculo3 Sleids Semana 01Jaime SalguerroОценок пока нет
- Homework 06Документ2 страницыHomework 06Jaime SalguerroОценок пока нет
- Math Eco Slides 03Документ56 страницMath Eco Slides 03Jaime SalguerroОценок пока нет
- Matlab 02Документ47 страницMatlab 02Jaime SalguerroОценок пока нет
- Igg 2017Документ48 страницIgg 2017Jaime SalguerroОценок пока нет
- Matlab 01Документ24 страницыMatlab 01Jaime SalguerroОценок пока нет
- Serie 8Документ1 страницаSerie 8Jaime SalguerroОценок пока нет
- Tarea01 PDFДокумент1 страницаTarea01 PDFJaime SalguerroОценок пока нет
- Serie 1 PDFДокумент1 страницаSerie 1 PDFJaime SalguerroОценок пока нет
- Serie 10Документ1 страницаSerie 10Jaime SalguerroОценок пока нет
- Licenciatura en matemáticas 2017 - Observaciones y ejerciciosДокумент1 страницаLicenciatura en matemáticas 2017 - Observaciones y ejerciciosJaime SalguerroОценок пока нет
- Serie 7 PDFДокумент1 страницаSerie 7 PDFJaime SalguerroОценок пока нет
- Beamer 5Документ63 страницыBeamer 5Jaime SalguerroОценок пока нет
- Serie 2Документ2 страницыSerie 2Jaime SalguerroОценок пока нет
- Curva de Nivel - TripticoДокумент5 страницCurva de Nivel - TripticoAlexander Martinez TigreОценок пока нет
- Números racionales e irracionales: definiciones, ejemplos y clasificaciónДокумент4 страницыNúmeros racionales e irracionales: definiciones, ejemplos y clasificaciónAudry N. PirónОценок пока нет
- Funciones NotablesДокумент14 страницFunciones NotablesJavier Martínez PeralesОценок пока нет
- Fichero de Actividades y Juegos PsicomotricesДокумент46 страницFichero de Actividades y Juegos PsicomotricesRafael Mayfair Bishop100% (2)
- COVICIDADДокумент18 страницCOVICIDADLeDiazОценок пока нет
- FiloДокумент5 страницFilomariadelmarsierranОценок пока нет
- Sistemas de ecuaciones linealesДокумент9 страницSistemas de ecuaciones linealesCatalina Figueroa CastroОценок пока нет
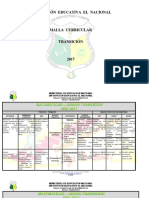
- Malla curricular Transición El Nacional 2017Документ5 страницMalla curricular Transición El Nacional 2017Yeison CelyОценок пока нет
- Condiciones de Equilibrio para Fuerzas Paralelas. T4Документ5 страницCondiciones de Equilibrio para Fuerzas Paralelas. T4gema anteОценок пока нет
- La Formacion Del Cuidadano Desde La Trilogia Territorio - Estado Carabobo PDFДокумент212 страницLa Formacion Del Cuidadano Desde La Trilogia Territorio - Estado Carabobo PDFraisaОценок пока нет
- Movimiento Parabolico Practica #5 Lab FisicaДокумент9 страницMovimiento Parabolico Practica #5 Lab FisicaDururu Du durururuОценок пока нет
- Memoria - Asoc. de Viv. Arboleda TacnaДокумент3 страницыMemoria - Asoc. de Viv. Arboleda TacnaGiovani Jesus Cutipa LeguaОценок пока нет
- Estudio de la elipse: definición, elementos y ecuacionesДокумент2 страницыEstudio de la elipse: definición, elementos y ecuacionesJhoan Heiner Fabian CristobalОценок пока нет
- Geometria Descriptiva para Arquitectura PDFДокумент240 страницGeometria Descriptiva para Arquitectura PDFKelly Alvarez100% (1)
- MecFluidos L3Документ4 страницыMecFluidos L3Juan MedinaОценок пока нет
- EscamillaMinguela - Martha - M19S2 - Movimientoenel PlanoinclinadoДокумент6 страницEscamillaMinguela - Martha - M19S2 - Movimientoenel PlanoinclinadoJonathanJesúsSanchezEscamillaОценок пока нет
- Metodo de Las Esferas AuxiliaresДокумент11 страницMetodo de Las Esferas AuxiliaresSilvia Chiuyari RuizОценок пока нет
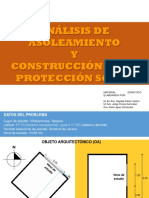
- 2 Asoleamiento y Proteccion Solar-2Документ23 страницы2 Asoleamiento y Proteccion Solar-2luis argeni lopez herreraОценок пока нет
- Ejercicios - Paralelismo y PerpendicularidadДокумент4 страницыEjercicios - Paralelismo y PerpendicularidadKevin CollantesОценок пока нет
- Unidad 2. - Replanteo de Curvas CircularesДокумент58 страницUnidad 2. - Replanteo de Curvas CircularesMaritza Cordova SalgadoОценок пока нет
- Sistema de Coordenadas CartesianoДокумент7 страницSistema de Coordenadas CartesianoFederico ValadezОценок пока нет