Вам также может понравиться
- HVAC Performance Test Quality Control and Inspection Report FormДокумент6 страницHVAC Performance Test Quality Control and Inspection Report Formhasan_676489616100% (1)
- Instructions Watts Thermostat XeluxДокумент2 страницыInstructions Watts Thermostat Xeluxmeegs_roОценок пока нет
- Adaptive Control: Presented by Harikrishna Satish.TДокумент22 страницыAdaptive Control: Presented by Harikrishna Satish.THari ThotaОценок пока нет
- RiverSurveyor Live ManualДокумент151 страницаRiverSurveyor Live Manualsequeira60Оценок пока нет
- EPRI Power System Dynamics TutorialДокумент1 010 страницEPRI Power System Dynamics TutorialSzabina100% (1)
- LaplaceTransform and System StabilityДокумент30 страницLaplaceTransform and System Stabilityhamza abdo mohamoudОценок пока нет
- Unconstrained and Constrained Optimization Algorithms by Soman K.PДокумент166 страницUnconstrained and Constrained Optimization Algorithms by Soman K.PprasanthrajsОценок пока нет
- Gauss Elimination NotesДокумент7 страницGauss Elimination Notesnavin shuklaОценок пока нет
- Simpsons RuleДокумент3 страницыSimpsons RuleSUBHAMОценок пока нет
- Source Seperation 1Документ41 страницаSource Seperation 1Tara GonzalesОценок пока нет
- Machine Learning Approaches To Robotic Grasping PDFДокумент80 страницMachine Learning Approaches To Robotic Grasping PDFAxel FehrОценок пока нет
- Mad Scientist Georgia Tech AI Robotics AutonomyДокумент99 страницMad Scientist Georgia Tech AI Robotics AutonomyMichele GiulianiОценок пока нет
- ML: Introduction 1. What Is Machine Learning?Документ38 страницML: Introduction 1. What Is Machine Learning?rohitОценок пока нет
- COMP 4211 - Machine LearningДокумент19 страницCOMP 4211 - Machine LearningLinh TaОценок пока нет
- Logix5000 Controllers Ladder Diagram: Programming ManualДокумент22 страницыLogix5000 Controllers Ladder Diagram: Programming Manualpt6766Оценок пока нет
- The Power of Negawatts: Efficiency: The Greenest Electricity SourceДокумент4 страницыThe Power of Negawatts: Efficiency: The Greenest Electricity SourcedjaliОценок пока нет
- Climate Change: CurbingДокумент6 страницClimate Change: CurbingReza Affandi MohamadОценок пока нет
- Proposal FinalДокумент5 страницProposal Finalijaz aliОценок пока нет
- E-Learning Courses at NFIДокумент7 страницE-Learning Courses at NFIRvSinghОценок пока нет
- ps1 Soln Fall09Документ11 страницps1 Soln Fall09tanmay2495Оценок пока нет
- Soft ComputingДокумент92 страницыSoft ComputingEco Frnd Nikhil ChОценок пока нет
- Ways To Prevent Global Warming: Introduction To The ThreatenДокумент6 страницWays To Prevent Global Warming: Introduction To The ThreatenFebin FrancisОценок пока нет
- Unit 5: Advanced Optimization Techniques (M.Tech)Документ10 страницUnit 5: Advanced Optimization Techniques (M.Tech)tsnrao30Оценок пока нет
- Known, What Has Been Done, and What Questions Remain UnansweredДокумент1 страницаKnown, What Has Been Done, and What Questions Remain UnansweredAngelОценок пока нет
- Control Systems Vs Machine LearningДокумент2 страницыControl Systems Vs Machine LearningSufiyan N-YoОценок пока нет
- Photosynthesis NotesДокумент2 страницыPhotosynthesis NotesSusan Miller StillОценок пока нет
- DIYguru MATLAB Course BrochureДокумент8 страницDIYguru MATLAB Course BrochureDIYguruОценок пока нет
- Hot ButtonsДокумент4 страницыHot ButtonsStrongeagle GenerationОценок пока нет
- Machine Learning Solution 3Документ5 страницMachine Learning Solution 3MRizqiSholahuddinОценок пока нет
- Signals Systems Question PaperДокумент14 страницSignals Systems Question PaperCoeus Apollo100% (1)
- Signals Sampling TheoremДокумент3 страницыSignals Sampling TheoremDebashis TaraiОценок пока нет
- DSP CEN352 Ch2 SamplingДокумент29 страницDSP CEN352 Ch2 SamplingTewodrosОценок пока нет
- Intelligent Agent: A Variety of DefinitionsДокумент6 страницIntelligent Agent: A Variety of DefinitionsNaveen KumarОценок пока нет
- Decision Tree - Associative Rule MiningДокумент69 страницDecision Tree - Associative Rule MiningNoh NaimОценок пока нет
- Chapter4 PDFДокумент11 страницChapter4 PDFAmirul AizadОценок пока нет
- Innovatrics: OEM SolutionsДокумент8 страницInnovatrics: OEM SolutionsDewa WijaksanaОценок пока нет
- Unit 4Документ16 страницUnit 4HiteshОценок пока нет
- DSP in Speech ProcessingДокумент11 страницDSP in Speech ProcessingKetan GargОценок пока нет
- CHP 1 Bda WileyДокумент9 страницCHP 1 Bda WileyCool GuyОценок пока нет
- Logistic RegressionДокумент37 страницLogistic RegressionMichael Oluwakayode AdedejiОценок пока нет
- Slide 1-14+ Backpropagation (BP) AlgorithmДокумент8 страницSlide 1-14+ Backpropagation (BP) AlgorithmMatt MedrosoОценок пока нет
- Machine Learning Machine Learning and DaДокумент19 страницMachine Learning Machine Learning and Dakarama abdeljabbarОценок пока нет
- OptimizationДокумент38 страницOptimizationt2jzgeОценок пока нет
- Matlab Ss SolnДокумент7 страницMatlab Ss Solncheenu15Оценок пока нет
- Ubiquitous Computing 1 (An Introduction)Документ27 страницUbiquitous Computing 1 (An Introduction)arpan47Оценок пока нет
- Logical Gates in Ladder Logic For PLC - The Engineering ProjectsДокумент10 страницLogical Gates in Ladder Logic For PLC - The Engineering ProjectscahyoОценок пока нет
- 01 Basic SignalДокумент13 страниц01 Basic SignalNk KushalОценок пока нет
- Multi-Channel Speech EnhancementДокумент35 страницMulti-Channel Speech EnhancementAdit Mbeyes Cah GetasОценок пока нет
- Echo CancellationДокумент19 страницEcho Cancellationbrittoajay43100% (1)
- Discrete Fourier Transform (DFT) : DFT Transforms The Time Domain Signal Samples To The Frequency Domain ComponentsДокумент59 страницDiscrete Fourier Transform (DFT) : DFT Transforms The Time Domain Signal Samples To The Frequency Domain ComponentsRandy SofyanОценок пока нет
- Ch7 Digital Filter DesignДокумент37 страницCh7 Digital Filter DesignAemal KhanОценок пока нет
- State Space Representation of Transfer Function SystemsДокумент5 страницState Space Representation of Transfer Function SystemsIvan VillanevaОценок пока нет
- Analog and Digital Signals Are Used To Transmit InformationДокумент49 страницAnalog and Digital Signals Are Used To Transmit Informationniiks119Оценок пока нет
- Artificial Neural NetworkДокумент3 страницыArtificial Neural NetworkmUZAОценок пока нет
- Chapter2-Neural+Network PartAДокумент38 страницChapter2-Neural+Network PartAWan MKОценок пока нет
- Smart Grid ReportДокумент13 страницSmart Grid ReportAlankrit SharmaОценок пока нет
- Vit Bhopal University: What Are Important Components of MATLAB?Документ6 страницVit Bhopal University: What Are Important Components of MATLAB?Raju ShanmugamОценок пока нет
- DomoticsДокумент3 страницыDomoticscaccaloneОценок пока нет
- ANN ProjectДокумент38 страницANN ProjectmaheshkundrapuОценок пока нет
- Orfanidis - Introduction To Signal Procesing - Solutions Manual (90p)Документ90 страницOrfanidis - Introduction To Signal Procesing - Solutions Manual (90p)Hoang Thao PhamОценок пока нет
- Loops - Do Until - Do While - Do - Access All in OneДокумент5 страницLoops - Do Until - Do While - Do - Access All in Onehnoor6Оценок пока нет
- Linear Systems: Prof. Dr. João Edgar Chaves Filho Mestrado em Eng. ElétricaДокумент49 страницLinear Systems: Prof. Dr. João Edgar Chaves Filho Mestrado em Eng. ElétricaAndré AraújoОценок пока нет
- EECE 301 Note Set 30 CT System StabilityДокумент30 страницEECE 301 Note Set 30 CT System StabilityrodriguesvascoОценок пока нет
- EECE 301 Note Set 30 CT System StabilityДокумент30 страницEECE 301 Note Set 30 CT System StabilityrodriguesvascoОценок пока нет
- EECE 301 Note Set 28a CT Partial FractionsДокумент8 страницEECE 301 Note Set 28a CT Partial FractionsrodriguesvascoОценок пока нет
- D-T Signals Relation Between DFT, DTFT, & CTFTДокумент22 страницыD-T Signals Relation Between DFT, DTFT, & CTFThamza abdo mohamoudОценок пока нет
- EECE 301 Note Set 13 FS DetailsДокумент21 страницаEECE 301 Note Set 13 FS DetailsrodriguesvascoОценок пока нет
- EECE 301 Note Set 18 CT Periodic Signal ResponseДокумент12 страницEECE 301 Note Set 18 CT Periodic Signal ResponserodriguesvascoОценок пока нет
- EECE 301 Note Set 12a Complex SinusoidsДокумент8 страницEECE 301 Note Set 12a Complex SinusoidsrodriguesvascoОценок пока нет
- EECE 301 Note Set 35 DT System Stability and Freq RespДокумент14 страницEECE 301 Note Set 35 DT System Stability and Freq ResprodriguesvascoОценок пока нет
- Defining and Testing Dynamic ADC ParametersДокумент7 страницDefining and Testing Dynamic ADC ParametersrodriguesvascoОценок пока нет
- EE 101 Spring 2022 HW-1Документ6 страницEE 101 Spring 2022 HW-1عمك مطيريОценок пока нет
- Net MeteringДокумент40 страницNet MeteringSadaf MaqsoodОценок пока нет
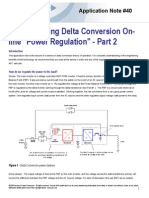
- Ups Part 2Документ5 страницUps Part 2NeztopОценок пока нет
- Discrete LED BarGraph MeterДокумент3 страницыDiscrete LED BarGraph Meterpaolov01Оценок пока нет
- BENZ Me97 Engine Programming-EnДокумент15 страницBENZ Me97 Engine Programming-EnTaha NoamanОценок пока нет
- SINAMICS G150 Converter Cabinet Units en-USДокумент770 страницSINAMICS G150 Converter Cabinet Units en-USAncaOniscu100% (1)
- NX200Документ102 страницыNX200FABIANОценок пока нет
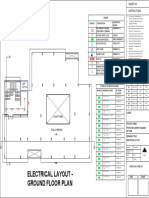
- Electrical Layout - Ground Floor Plan: Sheet No. InstructionsДокумент1 страницаElectrical Layout - Ground Floor Plan: Sheet No. InstructionsAbhishek AjayОценок пока нет
- A Method of Line Fault Location Based On Traveling Wave TheoryДокумент10 страницA Method of Line Fault Location Based On Traveling Wave TheorySuginoMarwotoОценок пока нет
- Test - Practice On Wiring: Protection From ShockДокумент4 страницыTest - Practice On Wiring: Protection From ShockShobu YarlagadaОценок пока нет
- WM-E1S Family Quick Reference Guide ENG v2 00-1Документ1 страницаWM-E1S Family Quick Reference Guide ENG v2 00-1Santiago MuñozОценок пока нет
- 390Документ1 страница390aqobumОценок пока нет
- Product Data: Fx4D Comfortt Series Fan Coil Sizes 019 Thru 061Документ16 страницProduct Data: Fx4D Comfortt Series Fan Coil Sizes 019 Thru 061Victor OrtegaОценок пока нет
- Ul 94Документ2 страницыUl 94ParagОценок пока нет
- References: Received 23 July 2013 Revised 21 March 2014Документ1 страницаReferences: Received 23 July 2013 Revised 21 March 2014ab__ismОценок пока нет
- خطوات عمل جداول الحسابات Panel SchedulesДокумент6 страницخطوات عمل جداول الحسابات Panel SchedulesMOAZ ASHRAFОценок пока нет
- Aeolian Vibration: Its Affects and Remedy On Transmission LinesДокумент10 страницAeolian Vibration: Its Affects and Remedy On Transmission LinesAsaduzzaman Khan0% (1)
- Delta Modulation Using GNU RadioДокумент6 страницDelta Modulation Using GNU RadioRakesh S K50% (2)
- MT QP 10 EssДокумент1 страницаMT QP 10 EssanurekharОценок пока нет
- Cat 15Документ2 страницыCat 15Gustavo Vargas0% (1)
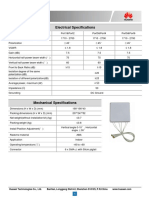
- 6 Ports Antenna DatasheetДокумент2 страницы6 Ports Antenna DatasheetСергей МирошниченкоОценок пока нет
- tl071 PDFДокумент15 страницtl071 PDFkodiacosОценок пока нет
- Nyy 1CДокумент1 страницаNyy 1Chenry_gtОценок пока нет
- Anybus® CompactCom™ M30Документ66 страницAnybus® CompactCom™ M30ReneAbarcaОценок пока нет
- HKE Supply Guide - 2011Документ264 страницыHKE Supply Guide - 2011Stanley SoОценок пока нет
- All Motor Ics ListДокумент8 страницAll Motor Ics Listankush sharmaОценок пока нет
- Weidmuller PRO RTD Signal Isolators ConvertersДокумент3 страницыWeidmuller PRO RTD Signal Isolators ConvertersFernando NunesОценок пока нет