Вам также может понравиться
- Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFДокумент5 страницSolution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFtargeties0% (1)
- ECSE 548 - Electronic Design and Implementation of The Sine Function On 8-Bit MIPS Processor - ReportДокумент4 страницыECSE 548 - Electronic Design and Implementation of The Sine Function On 8-Bit MIPS Processor - Reportpiohm100% (1)
- Implementation of Low Power and High Speed Multiplier-Accumulator Using SPST Adder and VerilogДокумент8 страницImplementation of Low Power and High Speed Multiplier-Accumulator Using SPST Adder and Verilogsujaganesan2009Оценок пока нет
- Full Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastiДокумент27 страницFull Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipastitargeties50% (2)
- Updated Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastiДокумент8 страницUpdated Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastitargetiesОценок пока нет
- Full Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFДокумент18 страницFull Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFtargetiesОценок пока нет
- Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastiДокумент11 страницSolution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastitargetiesОценок пока нет
- Very High-Level Synthesis of Datapath and Control Structures For Reconfigurable Logic DevicesДокумент5 страницVery High-Level Synthesis of Datapath and Control Structures For Reconfigurable Logic Devices8148593856Оценок пока нет
- ATEE 2004 Ilas 4.1Документ6 страницATEE 2004 Ilas 4.1electrotehnicaОценок пока нет
- Radial Basis Function Neural NetworksДокумент17 страницRadial Basis Function Neural Networkso iОценок пока нет
- Dmatm: Dual Modified Adaptive Technique Based MultiplierДокумент6 страницDmatm: Dual Modified Adaptive Technique Based MultiplierTJPRC PublicationsОценок пока нет
- FFFДокумент24 страницыFFFEngr Nayyer Nayyab MalikОценок пока нет
- Scilab Ninja: Module 6: Discrete-Time Control SystemsДокумент8 страницScilab Ninja: Module 6: Discrete-Time Control Systemsorg25grОценок пока нет
- Implementation of MAC Unit Using Booth Multiplier & Ripple Carry AdderДокумент3 страницыImplementation of MAC Unit Using Booth Multiplier & Ripple Carry AdderVijay KulkarniОценок пока нет
- Simulink Library Development and Implementation For VLSI Testing in MatlabДокумент8 страницSimulink Library Development and Implementation For VLSI Testing in MatlabM Chandan ShankarОценок пока нет
- A New Self-Healing DSTATCOM For Volt-VAR and Power Quality ControlДокумент8 страницA New Self-Healing DSTATCOM For Volt-VAR and Power Quality ControlMahutaОценок пока нет
- Assignment: - 4Документ7 страницAssignment: - 4nikita_gupta3Оценок пока нет
- Final Report: Delft University of Technology, EWI IN4342 Embedded Systems LaboratoryДокумент24 страницыFinal Report: Delft University of Technology, EWI IN4342 Embedded Systems LaboratoryBurlyaev DmitryОценок пока нет
- The Design of A Low Power Asynchronous Multiplier: Yijun Liu, Steve FurberДокумент6 страницThe Design of A Low Power Asynchronous Multiplier: Yijun Liu, Steve FurberMishi AggОценок пока нет
- High-Performance Modular Multiplication OnДокумент18 страницHigh-Performance Modular Multiplication OnHiywot yesufОценок пока нет
- Design of High Speed Multiplier Using Modified Booth Algorithm With Hybrid Carry Look-Ahead AdderДокумент7 страницDesign of High Speed Multiplier Using Modified Booth Algorithm With Hybrid Carry Look-Ahead Adderspkrishna4u7369Оценок пока нет
- Efficient Implementation of 16-Bit Multiplier-Accumulator Using Radix-2 Modified Booth Algorithm and SPST Adder Using VerilogДокумент12 страницEfficient Implementation of 16-Bit Multiplier-Accumulator Using Radix-2 Modified Booth Algorithm and SPST Adder Using VerilogAnonymous e4UpOQEPОценок пока нет
- Design of Roba Multiplier For High-Speed Yet Energy-Efficient Digital Signal Processing Using Verilog HDLДокумент16 страницDesign of Roba Multiplier For High-Speed Yet Energy-Efficient Digital Signal Processing Using Verilog HDLNishitha NishiОценок пока нет
- Performance Analysis of 32-Bit Array Multiplier With A Carry Save Adder and With A Carry-Look-Ahead AdderДокумент4 страницыPerformance Analysis of 32-Bit Array Multiplier With A Carry Save Adder and With A Carry-Look-Ahead Addernaveenbabu19Оценок пока нет
- Modeling and Simulation of FPGA Based VaДокумент13 страницModeling and Simulation of FPGA Based VaMario OrdenanaОценок пока нет
- 20mt8307 Term PaperДокумент27 страниц20mt8307 Term Papernaga DaminiОценок пока нет
- DCT/IDCT Implementation With Loeffler AlgorithmДокумент5 страницDCT/IDCT Implementation With Loeffler AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Electromagnetic Transients Simulation As An Objective Function Evaluator For Optimization of Power System PerformanceДокумент6 страницElectromagnetic Transients Simulation As An Objective Function Evaluator For Optimization of Power System PerformanceAhmed HussainОценок пока нет
- International Journal of Computational Engineering Research (IJCER)Документ11 страницInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Оценок пока нет
- Optimising power networks and temperature control systemsДокумент7 страницOptimising power networks and temperature control systemsOur Beatiful Waziristan OfficialОценок пока нет
- Chapter 1Документ8 страницChapter 1NIKHIL PUJARIОценок пока нет
- DC Motor SpeedДокумент11 страницDC Motor SpeedJonathanОценок пока нет
- A Computational Comparison of Two Different Approaches To Solve The Multi-Area Optimal Power FlowДокумент4 страницыA Computational Comparison of Two Different Approaches To Solve The Multi-Area Optimal Power FlowFlores JesusОценок пока нет
- Imp 22Документ31 страницаImp 22Panku RangareeОценок пока нет
- Design Lane Detector System For Autonomous Vehicles Based On Hardware Using Xilinx System GeneratorДокумент6 страницDesign Lane Detector System For Autonomous Vehicles Based On Hardware Using Xilinx System GeneratorLoi NgoОценок пока нет
- High-Speed Low Power MAC DesignДокумент4 страницыHigh-Speed Low Power MAC Designmurugs_anand100% (3)
- Benchmarking The Performance of A Dspic Controller Programed With Automatically Generated CodeДокумент7 страницBenchmarking The Performance of A Dspic Controller Programed With Automatically Generated CodeOmar Milián MorónОценок пока нет
- FPGA Based ReciprocatorДокумент5 страницFPGA Based ReciprocatorprathyushabandelaОценок пока нет
- Architectures For Programmable Digital Signal Processing DevicesДокумент24 страницыArchitectures For Programmable Digital Signal Processing DevicesShibani SanaОценок пока нет
- Module 2 NotesДокумент28 страницModule 2 NotesKrithika KОценок пока нет
- Variable precision FP multiplier performance comparisonДокумент4 страницыVariable precision FP multiplier performance comparisonRajesh BathijaОценок пока нет
- Fpga Implementation of A Multilayer Perceptron Neural Network Using VHDLДокумент4 страницыFpga Implementation of A Multilayer Perceptron Neural Network Using VHDLminoramixОценок пока нет
- Beating C in Scientific Computing with LISP PerformanceДокумент12 страницBeating C in Scientific Computing with LISP PerformancecluxОценок пока нет
- Optimization of Delay IIN Pipeline Mac Unit Using Wallace Tree MultiplierДокумент9 страницOptimization of Delay IIN Pipeline Mac Unit Using Wallace Tree MultiplierIJRASETPublicationsОценок пока нет
- Assembler Assignment: Embedded Systems EnggДокумент7 страницAssembler Assignment: Embedded Systems EnggNick AroraОценок пока нет
- Low Power VLSI Design of Modified Booth MultiplierДокумент6 страницLow Power VLSI Design of Modified Booth MultiplieridescitationОценок пока нет
- Design and Implementation of Modified Booth Recoder Using Fused Add Multiply OperatorДокумент5 страницDesign and Implementation of Modified Booth Recoder Using Fused Add Multiply OperatorIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalОценок пока нет
- DVCon Europe 2015 TA4 1 PaperДокумент8 страницDVCon Europe 2015 TA4 1 PaperJon DCОценок пока нет
- Unit 5Документ12 страницUnit 5savatid730Оценок пока нет
- Report PDFДокумент11 страницReport PDFshahОценок пока нет
- ConvolutionДокумент6 страницConvolutionAmar NathОценок пока нет
- Code Optimization Word-Wide Optimization Mixing C and AssemblyДокумент13 страницCode Optimization Word-Wide Optimization Mixing C and AssemblyJoshua DuffyОценок пока нет
- Assignment-2 Ami Pandat Parallel Processing: Time ComplexityДокумент12 страницAssignment-2 Ami Pandat Parallel Processing: Time ComplexityVICTBTECH SPUОценок пока нет
- Study of Fuzzy-PID Control in MATLAB For Two-Phase Hybrid Stepping Motor ZHANG Shengyi and WANG XinmingДокумент4 страницыStudy of Fuzzy-PID Control in MATLAB For Two-Phase Hybrid Stepping Motor ZHANG Shengyi and WANG XinmingMadhusmita BeheraОценок пока нет
- Circuit Analysis and Simulations Through Internet: NtroductionДокумент9 страницCircuit Analysis and Simulations Through Internet: NtroductionAline RochaОценок пока нет
- Research Paper On Booth MultiplierДокумент6 страницResearch Paper On Booth Multipliermrrhfzund100% (1)
- Advanced Techniques and Technology of Computer-Aided Feedback ControlОт EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlОценок пока нет
- Architecture-Aware Optimization Strategies in Real-time Image ProcessingОт EverandArchitecture-Aware Optimization Strategies in Real-time Image ProcessingОценок пока нет
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- Fundamental Physics Constants TableДокумент1 страницаFundamental Physics Constants TablevenkateshjuturuОценок пока нет
- Companies Involved in Semiconductor IndustryДокумент67 страницCompanies Involved in Semiconductor IndustryvenkateshjuturuОценок пока нет
- 2's Complement MulДокумент4 страницы2's Complement MulvenkateshjuturuОценок пока нет
- Alu DesignДокумент4 страницыAlu DesignvenkateshjuturuОценок пока нет
- Signals and Systems by ACEДокумент30 страницSignals and Systems by ACEvenkateshjuturu100% (4)
- Layout Design of LC VCO With Current MirrorДокумент5 страницLayout Design of LC VCO With Current MirrorvenkateshjuturuОценок пока нет
- Booth's Algorithm - Multiplication & DivisionДокумент27 страницBooth's Algorithm - Multiplication & Divisionnaveen86% (21)
- Adder Based Mul PDFДокумент4 страницыAdder Based Mul PDFvenkateshjuturuОценок пока нет
- BS 476-7-1997Документ24 страницыBS 476-7-1997Ivan ChanОценок пока нет
- Sample File: Official Game AccessoryДокумент6 страницSample File: Official Game AccessoryJose L GarcíaОценок пока нет
- 2.1D Diy-Exercises (Questionnaires)Документ31 страница2.1D Diy-Exercises (Questionnaires)Chinito Reel CasicasОценок пока нет
- George F Kennan and The Birth of Containment The Greek Test CaseДокумент17 страницGeorge F Kennan and The Birth of Containment The Greek Test CaseEllinikos Emfilios100% (1)
- Rak Single DentureДокумент48 страницRak Single Denturerakes0Оценок пока нет
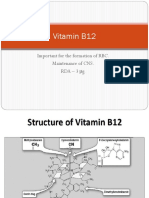
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceДокумент19 страницVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathОценок пока нет
- De Broglie's Hypothesis: Wave-Particle DualityДокумент4 страницыDe Broglie's Hypothesis: Wave-Particle DualityAvinash Singh PatelОценок пока нет
- Lesson 6. TNCTДокумент32 страницыLesson 6. TNCTEsther EdaniolОценок пока нет
- Engb546 NP RevisedДокумент5 страницEngb546 NP RevisedRafaelaОценок пока нет
- (123doc) - Internship-Report-Improving-Marketing-Strategies-At-Telecommunication-Service-Corporation-Company-VinaphoneДокумент35 страниц(123doc) - Internship-Report-Improving-Marketing-Strategies-At-Telecommunication-Service-Corporation-Company-VinaphoneK59 PHAN HA PHUONGОценок пока нет
- Social Media Marketing - AssignmentДокумент8 страницSocial Media Marketing - AssignmentAllen RodaОценок пока нет
- Introduction To Tensors: Contravariant and Covariant VectorsДокумент18 страницIntroduction To Tensors: Contravariant and Covariant VectorslilaОценок пока нет
- Identifying States of Matter LessonДокумент2 страницыIdentifying States of Matter LessonRaul OrcigaОценок пока нет
- CvSU Vision and MissionДокумент2 страницыCvSU Vision and MissionJoshua LagonoyОценок пока нет
- Music 146 SyllabusДокумент4 страницыMusic 146 SyllabusNatОценок пока нет
- Net Ionic EquationsДокумент8 страницNet Ionic EquationsCarl Agape DavisОценок пока нет
- James A. Mcnamara JR.: An Interview WithДокумент22 страницыJames A. Mcnamara JR.: An Interview WithMiguel candelaОценок пока нет
- Sigafoose Robert Diane 1984 SingaporeДокумент5 страницSigafoose Robert Diane 1984 Singaporethe missions networkОценок пока нет
- Duah'sДокумент3 страницыDuah'sZareefОценок пока нет
- Assalamu'alaikum WR WB.: Emcee Script (1) Pre - AnnouncementДокумент3 страницыAssalamu'alaikum WR WB.: Emcee Script (1) Pre - AnnouncementGian AlfaОценок пока нет
- Evidence Law PDFДокумент15 страницEvidence Law PDFwanborОценок пока нет
- News CorpДокумент17 страницNews CorpIshita SharmaОценок пока нет
- Rhodes Solutions Ch4Документ19 страницRhodes Solutions Ch4Joson Chai100% (4)
- Converting Units of Measure PDFДокумент23 страницыConverting Units of Measure PDFM Faisal ChОценок пока нет
- Photojournale - Connections Across A Human PlanetДокумент75 страницPhotojournale - Connections Across A Human PlanetjohnhorniblowОценок пока нет
- Giles. Saint Bede, The Complete Works of Venerable Bede. 1843. Vol. 8.Документ471 страницаGiles. Saint Bede, The Complete Works of Venerable Bede. 1843. Vol. 8.Patrologia Latina, Graeca et Orientalis100% (1)
- Corneal Ulcers: What Is The Cornea?Документ1 страницаCorneal Ulcers: What Is The Cornea?me2_howardОценок пока нет
- International Journal of Current Advanced Research International Journal of Current Advanced ResearchДокумент4 страницыInternational Journal of Current Advanced Research International Journal of Current Advanced Researchsoumya mahantiОценок пока нет
- Configure Windows 10 for Aloha POSДокумент7 страницConfigure Windows 10 for Aloha POSBobbyMocorroОценок пока нет
- Econometrics IntroductionДокумент41 страницаEconometrics IntroductionRay Vega LugoОценок пока нет