Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- 320D, 321D, 323D, 324D, 325D, Hydraulic System - Attachment 329D, 330D, and 336D ExcavatorДокумент2 страницы320D, 321D, 323D, 324D, 325D, Hydraulic System - Attachment 329D, 330D, and 336D Excavatorxuan80% (5)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Hazen-Williams Equation - Pipe Flow Calculations - S.I. UnitsДокумент22 страницыHazen-Williams Equation - Pipe Flow Calculations - S.I. UnitsdiegoОценок пока нет
- Corrugated Plate InterceptorДокумент8 страницCorrugated Plate InterceptorDavid LambertОценок пока нет
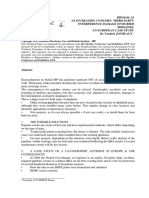
- Riopipeline2019 1138 Rio Paper Rev01 PDFДокумент11 страницRiopipeline2019 1138 Rio Paper Rev01 PDFMarcelo Varejão CasarinОценок пока нет
- IBP1146 - 19 Maintenance Productivity Measurement Study at TranspetroДокумент8 страницIBP1146 - 19 Maintenance Productivity Measurement Study at TranspetroMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1140 Ibp 1140 Nao Intrusivos Final PDFДокумент4 страницыRiopipeline2019 1140 Ibp 1140 Nao Intrusivos Final PDFMarcelo Varejão CasarinОценок пока нет
- IBP1142 - 19 Offshore Development: Submarine Pipelines-Soil InteractionДокумент13 страницIBP1142 - 19 Offshore Development: Submarine Pipelines-Soil InteractionMarcelo Varejão CasarinОценок пока нет
- IBP1128 - 19 In-Service Welding Hot Tap of Refinary Pipeline With Hydrogen and EthyleneДокумент10 страницIBP1128 - 19 In-Service Welding Hot Tap of Refinary Pipeline With Hydrogen and EthyleneMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1137 201906031307ibp1137 19 Increas PDFДокумент10 страницRiopipeline2019 1137 201906031307ibp1137 19 Increas PDFMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1124 Worlds First Remote Deepwater PDFДокумент10 страницRiopipeline2019 1124 Worlds First Remote Deepwater PDFMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1127 Article Number Ibp1127 19 PDFДокумент10 страницRiopipeline2019 1127 Article Number Ibp1127 19 PDFMarcelo Varejão CasarinОценок пока нет
- IBP1141 - 19 The Use of Optical Sensor To Investigate Dissolved Oxygen in CrudeДокумент12 страницIBP1141 - 19 The Use of Optical Sensor To Investigate Dissolved Oxygen in CrudeMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1135 Riopipeline2019 t1135 JST Av1Документ8 страницRiopipeline2019 1135 Riopipeline2019 t1135 JST Av1Marcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1126 Article Number Ibp1126 19 PDFДокумент11 страницRiopipeline2019 1126 Article Number Ibp1126 19 PDFMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1107 201905201751ibp1107 19 Jacques PDFДокумент7 страницRiopipeline2019 1107 201905201751ibp1107 19 Jacques PDFMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1115 201906070716fm 3811 00 Formato PDFДокумент13 страницRiopipeline2019 1115 201906070716fm 3811 00 Formato PDFMarcelo Varejão CasarinОценок пока нет
- IBP1123 - 19 Caliper Ili Experience in Offshore Pre-CommissioningДокумент10 страницIBP1123 - 19 Caliper Ili Experience in Offshore Pre-CommissioningMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1120 Ibp1120 19 Transpetro S Worklo PDFДокумент9 страницRiopipeline2019 1120 Ibp1120 19 Transpetro S Worklo PDFMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1121 201906051235ibp1121 19 Final PDFДокумент8 страницRiopipeline2019 1121 201906051235ibp1121 19 Final PDFMarcelo Varejão CasarinОценок пока нет
- IBP1119 - 19 Internal Corrosion Detection: Conference and Exhibition 2019Документ4 страницыIBP1119 - 19 Internal Corrosion Detection: Conference and Exhibition 2019Marcelo Varejão CasarinОценок пока нет
- IBP1122 - 19 High Grade Sawl Linepipe Manufacturing and Field Weld Simulation For Harsh EnvironmentsДокумент11 страницIBP1122 - 19 High Grade Sawl Linepipe Manufacturing and Field Weld Simulation For Harsh EnvironmentsMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1117 Ibp1117 19 Versao Final para e PDFДокумент8 страницRiopipeline2019 1117 Ibp1117 19 Versao Final para e PDFMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1113 201906031824ibp Riopipeline 11 PDFДокумент10 страницRiopipeline2019 1113 201906031824ibp Riopipeline 11 PDFMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1112 FM 1112 FinalДокумент10 страницRiopipeline2019 1112 FM 1112 FinalMarcelo Varejão CasarinОценок пока нет
- IBP1110 - 19 The Relevance of Fuel Transmission Pipelines in BrazilДокумент10 страницIBP1110 - 19 The Relevance of Fuel Transmission Pipelines in BrazilMarcelo Varejão CasarinОценок пока нет
- IBP1095 - 19 in Flexible Pipes Systems and AncillariesДокумент8 страницIBP1095 - 19 in Flexible Pipes Systems and AncillariesMarcelo Varejão CasarinОценок пока нет
- IBP1111 - 19 Best Alternative For Rigid Offshore Pipelines Decommissioning - A Case StudyДокумент13 страницIBP1111 - 19 Best Alternative For Rigid Offshore Pipelines Decommissioning - A Case StudyMarcelo Varejão CasarinОценок пока нет
- IBP1099 - 19 Deep Water Pip Installation Using Reel-Lay MethodДокумент12 страницIBP1099 - 19 Deep Water Pip Installation Using Reel-Lay MethodMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1104 201906031512fm 3811 00 Formato PDFДокумент11 страницRiopipeline2019 1104 201906031512fm 3811 00 Formato PDFMarcelo Varejão CasarinОценок пока нет
- Riopipeline2019 1093 201905221205final Paper Overpi PDFДокумент12 страницRiopipeline2019 1093 201905221205final Paper Overpi PDFMarcelo Varejão Casarin100% (1)
- IBP 1102 - 19 A Gas Routing Identification System On A Pipeline NetworkДокумент12 страницIBP 1102 - 19 A Gas Routing Identification System On A Pipeline NetworkMarcelo Varejão CasarinОценок пока нет
- IBP1101 - 19 Element Simulations and Offshore ObservationsДокумент13 страницIBP1101 - 19 Element Simulations and Offshore ObservationsMarcelo Varejão CasarinОценок пока нет
- Pressure DistributionДокумент3 страницыPressure DistributionMahadevanОценок пока нет
- CIBSE Pipe Sizing V2.2Документ9 страницCIBSE Pipe Sizing V2.2Sarmad ShahОценок пока нет
- Air Draft SystemДокумент40 страницAir Draft SystemAshwani DograОценок пока нет
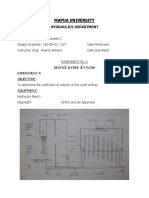
- Mapua University: Hydraulics DepartmentДокумент10 страницMapua University: Hydraulics DepartmentPaul CamachoОценок пока нет
- Design and Fabrication of Amphibious Bicycle: June 2015Документ36 страницDesign and Fabrication of Amphibious Bicycle: June 2015Amanuel GetachewОценок пока нет
- Test 1 - FluidДокумент8 страницTest 1 - FluiddaniaОценок пока нет
- Cepsa Supermultigrado SHPD 15W40Документ1 страницаCepsa Supermultigrado SHPD 15W40RamonОценок пока нет
- Turbo 142 2 021004Документ14 страницTurbo 142 2 021004boroumandОценок пока нет
- Design and Installation of As andДокумент7 страницDesign and Installation of As andMurli ramchandranОценок пока нет
- 4 - Gas Flow MeasurementДокумент46 страниц4 - Gas Flow MeasurementHashem HashemОценок пока нет
- Flow Through An Orifice From The Application of Bernoulli's Equation (Conservation of Mechanical Energy For A SteadyДокумент6 страницFlow Through An Orifice From The Application of Bernoulli's Equation (Conservation of Mechanical Energy For A SteadyReinier Roman SantosОценок пока нет
- NUMERICAL SIMULATION OF FLOW OVER TWO CylindersДокумент14 страницNUMERICAL SIMULATION OF FLOW OVER TWO CylindersAkhil francisОценок пока нет
- AHLSTAR End Suction Single Stage Centrifugal PumpsДокумент24 страницыAHLSTAR End Suction Single Stage Centrifugal PumpsВиталий БоровикОценок пока нет
- Installation - Check-List - Eng - Rev-10 For Cooling Tower Filtration UnitДокумент10 страницInstallation - Check-List - Eng - Rev-10 For Cooling Tower Filtration UnitMidha NeerОценок пока нет
- Gomez Et Al 2000 Prediction of Slug Liquid Holdup PDFДокумент5 страницGomez Et Al 2000 Prediction of Slug Liquid Holdup PDFFrancisco OppsОценок пока нет
- Akışkanlar VizeДокумент5 страницAkışkanlar Vizeselenaykaya8Оценок пока нет
- Materials: Opw 199asv Anti-Siphon ValveДокумент1 страницаMaterials: Opw 199asv Anti-Siphon ValveSuhasОценок пока нет
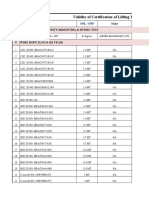
- Validity of Certification of Lifting Tools, Tackles & Pressure Vessels in PP#2Документ6 страницValidity of Certification of Lifting Tools, Tackles & Pressure Vessels in PP#2Avishek PathakОценок пока нет
- Piping Spec Book 1Документ259 страницPiping Spec Book 1interx00Оценок пока нет
- Experience Abba "Performance+ " Parts To Fit: Oem Model PartsДокумент5 страницExperience Abba "Performance+ " Parts To Fit: Oem Model PartsNeil SandersОценок пока нет
- Lubricating Oil Grease For Rotating Equipment of All Sumsel 5 PlantДокумент62 страницыLubricating Oil Grease For Rotating Equipment of All Sumsel 5 Plantarief fardy yuskaОценок пока нет
- IQCM Final For Industry-12!06!2015Документ142 страницыIQCM Final For Industry-12!06!2015raj dasОценок пока нет
- SSC JE Mechanical Study Material FLUID MACHINESДокумент17 страницSSC JE Mechanical Study Material FLUID MACHINESMr. BeastОценок пока нет
- The Science Behind Bubbles Compound Interest Style PosterДокумент1 страницаThe Science Behind Bubbles Compound Interest Style PosterJonathan WheeltonОценок пока нет
- Reference Reach Reference Reach: The Spreadsheet The SpreadsheetДокумент7 страницReference Reach Reference Reach: The Spreadsheet The SpreadsheetJulio Carrion ContrerasОценок пока нет
- Merging of Soap Bubbles and Why Surfactant MattersДокумент5 страницMerging of Soap Bubbles and Why Surfactant MattersShefa CalistaОценок пока нет
- Hydrological Characteristics at Hilly Catchment in A Semi-Arid Region, ChileДокумент8 страницHydrological Characteristics at Hilly Catchment in A Semi-Arid Region, ChileSudharsananPRSОценок пока нет