Вам также может понравиться
- Robótica - Manual Robix SoftwareTutorialsДокумент19 страницRobótica - Manual Robix SoftwareTutorialsRenanОценок пока нет
- Robix Familiarisation Guide: School of Information Technology and Engineering University of OttawaДокумент14 страницRobix Familiarisation Guide: School of Information Technology and Engineering University of OttawaYen BaoОценок пока нет
- Bascom Avr TutorialДокумент22 страницыBascom Avr TutorialrezakaihaniОценок пока нет
- LabVIEW Introduction to LabVIEW (Part 2Документ13 страницLabVIEW Introduction to LabVIEW (Part 2Asad RazaОценок пока нет
- Lab 1 Cadence TutorialДокумент36 страницLab 1 Cadence TutorialN Nanda GaneshОценок пока нет
- Virtuoso Layout Design OverviewДокумент20 страницVirtuoso Layout Design OverviewMasud SarkerОценок пока нет
- RobotBASIC TutorialДокумент7 страницRobotBASIC Tutorialaloksahu1Оценок пока нет
- Cadence TutorialДокумент66 страницCadence TutorialParvathy S ParvathyОценок пока нет
- Assignment 09Документ11 страницAssignment 09sanzida IslamОценок пока нет
- ONOS Basic TutorialДокумент20 страницONOS Basic TutorialWoldemariam WorkuОценок пока нет
- Synopsys Syn 2016Документ15 страницSynopsys Syn 2016Himanshu PatraОценок пока нет
- Introduction of Cadence Tools (Extraction)Документ8 страницIntroduction of Cadence Tools (Extraction)giaoduyvinhОценок пока нет
- Cadence TutorialДокумент19 страницCadence Tutorialsuri1991Оценок пока нет
- Introduction of Cadence ToolsДокумент18 страницIntroduction of Cadence ToolsLeo AzОценок пока нет
- Compu Show Software User Manual v1Документ283 страницыCompu Show Software User Manual v1TJ SteinОценок пока нет
- Kiosk WERA SettingДокумент9 страницKiosk WERA SettingNanda Miftahul KhoyriОценок пока нет
- 32 Servo Controller ManualДокумент12 страниц32 Servo Controller ManualceltilanderОценок пока нет
- ABAPДокумент28 страницABAPSunil kumarОценок пока нет
- 3 Layout TutorialДокумент11 страниц3 Layout TutorialRupesh ParabОценок пока нет
- User Guide: Boson Netsim OverviewДокумент54 страницыUser Guide: Boson Netsim Overviewkssr_579410930Оценок пока нет
- Posiflex OPOS Driver Installation V13xxДокумент11 страницPosiflex OPOS Driver Installation V13xxelbakri abd elhakimОценок пока нет
- Lab 1: SFC: BackgroundДокумент20 страницLab 1: SFC: BackgroundAntonio GodoyОценок пока нет
- Servo PodДокумент237 страницServo Podluis_garcia_109Оценок пока нет
- Ableton Framework ClassesДокумент43 страницыAbleton Framework ClassesthepsalmistОценок пока нет
- Installing Using VMДокумент12 страницInstalling Using VMsaz gaxОценок пока нет
- Quickstartguide Ethereum LinuxДокумент9 страницQuickstartguide Ethereum LinuxoscarОценок пока нет
- Test Drive Guide PDFДокумент10 страницTest Drive Guide PDFmarcoОценок пока нет
- Network Installation Guide: Windows and MacДокумент20 страницNetwork Installation Guide: Windows and Machaidang708Оценок пока нет
- High Frequency Amplifier Introduction to ADSДокумент26 страницHigh Frequency Amplifier Introduction to ADSJulio AltamiranoОценок пока нет
- World of AnimationДокумент42 страницыWorld of Animationankur BoraОценок пока нет
- Arubaos-Cx Ova Network Setup in Esxi: RequirementsДокумент26 страницArubaos-Cx Ova Network Setup in Esxi: RequirementsRichard Orlando Tobar AedoОценок пока нет
- Massiveboard V1.1 Quick Start Guide September 2009Документ24 страницыMassiveboard V1.1 Quick Start Guide September 2009wilrodri1Оценок пока нет
- Creating an Inverter in S-EditДокумент18 страницCreating an Inverter in S-EditmanirnaiduОценок пока нет
- DE#46 #8VLQJ#&RQWURO#$UUD/V: 2emhfwlyhvДокумент4 страницыDE#46 #8VLQJ#&RQWURO#$UUD/V: 2emhfwlyhvEdgar RamirezОценок пока нет
- Cadence TutorialsДокумент37 страницCadence Tutorialsjohnisrael65Оценок пока нет
- Basic MPLABX SimulationДокумент8 страницBasic MPLABX SimulationidkОценок пока нет
- DocumentationДокумент146 страницDocumentationgothickaОценок пока нет
- Zone Manager Replacement ProcedureДокумент10 страницZone Manager Replacement Procedureritaform.oran.31Оценок пока нет
- Lab 1 SolnДокумент14 страницLab 1 SolnDrita NishkuОценок пока нет
- Micrologix: Rslogix 500 Lab#3Документ31 страницаMicrologix: Rslogix 500 Lab#3Fernando Jaime Alonso Martínez100% (1)
- Manual Scenario:: Brief Introduction of ScenarioДокумент10 страницManual Scenario:: Brief Introduction of ScenarioBhanu Prakash JanumpallyОценок пока нет
- Lab 1 - Getting Started With Opnet ModelerДокумент18 страницLab 1 - Getting Started With Opnet Modelertexilion100% (1)
- Tracking of SunДокумент7 страницTracking of SunnagapulipatiОценок пока нет
- Lab Exercise-1Документ16 страницLab Exercise-1hassaanpashaОценок пока нет
- Bourret ScratchProgrammingДокумент43 страницыBourret ScratchProgrammingjosef100% (1)
- Cadence TutorialДокумент12 страницCadence TutorialAshraf HusseinОценок пока нет
- An Introduction To Programming With Scratch: Ronald BourretДокумент43 страницыAn Introduction To Programming With Scratch: Ronald BourretHazem Osman 2512Оценок пока нет
- Generic RobotC Programming BookДокумент32 страницыGeneric RobotC Programming BookDownald TroumpОценок пока нет
- Lab 7Документ5 страницLab 743932233Оценок пока нет
- Posiflex OPOS Driver Installation V13xxДокумент11 страницPosiflex OPOS Driver Installation V13xxYannes HutajuluОценок пока нет
- Unpacking - MoleBox.v2.6. (Extracting Embedded Files) - (ColdFeveДокумент14 страницUnpacking - MoleBox.v2.6. (Extracting Embedded Files) - (ColdFeveJhwazkdОценок пока нет
- Lab 10 Introduction To GNS3 and Static RoutingДокумент18 страницLab 10 Introduction To GNS3 and Static RoutingShahzad HussainОценок пока нет
- MeasureCurrent 1Документ7 страницMeasureCurrent 1ellieОценок пока нет
- GNS3 Lab: Configure Static RoutingДокумент18 страницGNS3 Lab: Configure Static RoutingShahzad HussainОценок пока нет
- Lab 1, Getting Started With Opnet Modeler Creating A New ProjectДокумент18 страницLab 1, Getting Started With Opnet Modeler Creating A New Projectkhubaib_maharОценок пока нет
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesОт EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesРейтинг: 5 из 5 звезд5/5 (1)
- Curicullum VitaeДокумент14 страницCuricullum VitaeEwerton CostadelleОценок пока нет
- Cobem 2019 FeesДокумент1 страницаCobem 2019 FeesEwerton CostadelleОценок пока нет
- Yale-New Haven Teachers Institute "Changes in Lifestyle Due To Electricity"Документ10 страницYale-New Haven Teachers Institute "Changes in Lifestyle Due To Electricity"Ewerton CostadelleОценок пока нет
- Debates CbaДокумент2 страницыDebates CbaEwerton CostadelleОценок пока нет
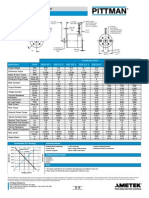
- 9230 DC MotorДокумент6 страниц9230 DC MotorEwerton CostadelleОценок пока нет
- SF6P-HM Datasheet V3.0 20200819Документ2 страницыSF6P-HM Datasheet V3.0 20200819JoseLuisОценок пока нет
- Configuring IRS DevicesДокумент29 страницConfiguring IRS DevicespeterlimttkОценок пока нет
- A Seminar ReportДокумент13 страницA Seminar ReportABUBSAKAR SIDIQ AMINUОценок пока нет
- LG 32LC7RДокумент88 страницLG 32LC7RDadien WahyudinОценок пока нет
- QuickServer Startup Guide for FS-QS-1010/1011/12X0/12X1Документ34 страницыQuickServer Startup Guide for FS-QS-1010/1011/12X0/12X1ogautierОценок пока нет
- Computer Science-Xii Unit-Ii, Computer Networks-10 Marks: Switching TechniquesДокумент18 страницComputer Science-Xii Unit-Ii, Computer Networks-10 Marks: Switching TechniquesAahir BasuОценок пока нет
- Premier 300Документ2 страницыPremier 300Ranjith Kumar100% (1)
- COMP 361 Computer Communications Networks: Midterm Examination 2Документ5 страницCOMP 361 Computer Communications Networks: Midterm Examination 2Ishan JawaОценок пока нет
- IPv6 global unicast addresses quizДокумент40 страницIPv6 global unicast addresses quizAdilson PedroОценок пока нет
- RDVV B.a.ll.B. (Hons.) II Sem Examination 2016 ResultДокумент152 страницыRDVV B.a.ll.B. (Hons.) II Sem Examination 2016 ResultMiThUn KuMaRОценок пока нет
- Sst-Cpe590 5.8Ghz 900mbpswireless Bridge: OverviewДокумент4 страницыSst-Cpe590 5.8Ghz 900mbpswireless Bridge: OverviewtayibouОценок пока нет
- CV Annurawat ApcДокумент4 страницыCV Annurawat ApcAnnuRawatОценок пока нет
- Openflow Interop TutorialДокумент27 страницOpenflow Interop Tutorialnishik_8100% (1)
- 2019-03-20 - PC EXPRESS - DEALER'S PRICE LIST (Strictly For Cash Payments Only) PDFДокумент2 страницы2019-03-20 - PC EXPRESS - DEALER'S PRICE LIST (Strictly For Cash Payments Only) PDFTondo PharmОценок пока нет
- Ccna Security Chapter 2 Lab A - Securing The Router For Administrative Access Instructor Version Topology IpДокумент4 страницыCcna Security Chapter 2 Lab A - Securing The Router For Administrative Access Instructor Version Topology IpseekeroftheflameОценок пока нет
- CO No. Statement of Course Outcome Bloom's Cognitive Process Level (BL) Knowledge Category (KC)Документ2 страницыCO No. Statement of Course Outcome Bloom's Cognitive Process Level (BL) Knowledge Category (KC)akttripathiОценок пока нет
- RHCE EXAM Solution PDFДокумент13 страницRHCE EXAM Solution PDFPravind Kumar100% (1)
- ИСО МЭК 17789 przntДокумент24 страницыИСО МЭК 17789 przntOlga IlyinaОценок пока нет
- CookiesДокумент39 страницCookiesayhamcoОценок пока нет
- ZKTime5.0Attendance Management Software User ManualV1.3Документ267 страницZKTime5.0Attendance Management Software User ManualV1.3christiano2112Оценок пока нет
- Debug 1214Документ5 страницDebug 1214Allali NajiОценок пока нет
- DATA GUARD BEST PRACTICES AND DG TOOLKITДокумент7 страницDATA GUARD BEST PRACTICES AND DG TOOLKITyerzalОценок пока нет
- HwontlogДокумент12 страницHwontlogKapten PediaОценок пока нет
- Exercise 1.1: Configuring The System For Sudo: /etc/sudoers.dДокумент1 страницаExercise 1.1: Configuring The System For Sudo: /etc/sudoers.dPon MeenaОценок пока нет
- Top US Telecom Brands On Social MediaДокумент31 страницаTop US Telecom Brands On Social MediaSimplify360Оценок пока нет
- Defensepro Tech Specs Defensepro Tech Specs Defensepro Tech SpecsДокумент2 страницыDefensepro Tech Specs Defensepro Tech Specs Defensepro Tech Specsmof199Оценок пока нет
- MS01 User Guide V2.1Документ38 страницMS01 User Guide V2.1pasvic70100% (1)
- H175 E1 01Документ108 страницH175 E1 01Daniel CalleОценок пока нет
- NATO's Evolution to a Federated Satellite Communications NetworkДокумент13 страницNATO's Evolution to a Federated Satellite Communications NetworkReed Russell100% (1)
- Enhanced Production and Risk Management in Agriculture (Eprima) Decision Support SystemДокумент26 страницEnhanced Production and Risk Management in Agriculture (Eprima) Decision Support Systemjamesearl_cubillasОценок пока нет