Вам также может понравиться
- What Is A WiFi Sniffer and Why You Should Care - KisMACДокумент1 страницаWhat Is A WiFi Sniffer and Why You Should Care - KisMACcoep05Оценок пока нет
- Book Index The Art of Heavy TransportДокумент6 страницBook Index The Art of Heavy TransportHermon Pakpahan50% (2)
- List of Fatigue Standards and Fracture Standards Developed by ASTM & ISOДокумент3 страницыList of Fatigue Standards and Fracture Standards Developed by ASTM & ISOSatrio Aditomo100% (1)
- CulvertsДокумент18 страницCulvertsAmmar A. Ali100% (1)
- Matters Signified by The Sublord of 11th Cusp in KP SystemДокумент2 страницыMatters Signified by The Sublord of 11th Cusp in KP SystemHarry HartОценок пока нет
- Project MatlabДокумент10 страницProject MatlabAbdullahОценок пока нет
- Combined Sliding Mode Control With A Feedback Linearization For Speed Control of Induction MotorДокумент6 страницCombined Sliding Mode Control With A Feedback Linearization For Speed Control of Induction MotorkandibanОценок пока нет
- Quartile1 PDFДокумент2 страницыQuartile1 PDFHanifah Edres DalumaОценок пока нет
- A Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR TechniqueДокумент13 страницA Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR Technique3KaiserEОценок пока нет
- Pellicon 2 Validation Guide PDFДокумент45 страницPellicon 2 Validation Guide PDFtakwahs12135Оценок пока нет
- Comparative Study Between The Conventional Regulators and Fuzzy Logic Controller: Application On The Induction MachineДокумент17 страницComparative Study Between The Conventional Regulators and Fuzzy Logic Controller: Application On The Induction Machinemechernene_aek9037Оценок пока нет
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemДокумент6 страницA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukeОценок пока нет
- A PI Controller Based On Gain-Scheduling For Synchronous GeneratorДокумент11 страницA PI Controller Based On Gain-Scheduling For Synchronous GeneratoratirinaОценок пока нет
- Optimal Multiobjective Design of Power System Stabilizers Using Simulated AnnealingДокумент12 страницOptimal Multiobjective Design of Power System Stabilizers Using Simulated Annealingashikhmd4467Оценок пока нет
- Powers Ys 400Документ6 страницPowers Ys 400makroumОценок пока нет
- SSRN Id3536283Документ14 страницSSRN Id3536283Likamata Gedeon NadaОценок пока нет
- A Proposed Method For Processing Unbalanced Conditions and DC Offset Currents in Transient Stability AnalysisДокумент6 страницA Proposed Method For Processing Unbalanced Conditions and DC Offset Currents in Transient Stability AnalysisRafaelo09Оценок пока нет
- Fault Detection Based On Observer For Nonlinear Dynamic Power SystemДокумент8 страницFault Detection Based On Observer For Nonlinear Dynamic Power SystemAbdulazeez Ayomide AdebimpeОценок пока нет
- Online Control of SVC Using ANN Based Pole Placement ApproachДокумент5 страницOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliОценок пока нет
- 019 036 PDFДокумент18 страниц019 036 PDFmechernene_aek9037Оценок пока нет
- Powers Ys 700Документ8 страницPowers Ys 700makroumОценок пока нет
- Ananthapadmanabha Et AlДокумент11 страницAnanthapadmanabha Et AlpkumarmysОценок пока нет
- Jia 2012Документ6 страницJia 2012Anonymous hDJIZwEuoОценок пока нет
- A Robust Optimal Sliding-Mode Control Approach For Magnetic Levitation SystemsДокумент8 страницA Robust Optimal Sliding-Mode Control Approach For Magnetic Levitation Systemsankurgoel1975Оценок пока нет
- Balancing of An Inverted Pendulum Using PD ControllerДокумент6 страницBalancing of An Inverted Pendulum Using PD Controllera514915Оценок пока нет
- A PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorДокумент5 страницA PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorMd Mustafa KamalОценок пока нет
- SantaДокумент11 страницSantaVashik BedasieОценок пока нет
- A Sensorless Robust Vector Control of Induction Motor DrivesДокумент6 страницA Sensorless Robust Vector Control of Induction Motor DrivesLava KumarОценок пока нет
- Control of DC Electric MotorДокумент16 страницControl of DC Electric MotorNa ChОценок пока нет
- GFHFGJДокумент8 страницGFHFGJAlakananda ChoudhuryОценок пока нет
- Adaptive AI-based Two-Stage Control For An Induction Machine DriveДокумент15 страницAdaptive AI-based Two-Stage Control For An Induction Machine DriveLuegim Ely Damiao Celmar0% (1)
- Power Systems - Basic Concepts and Applications - Part Ii: Pdhonline Course E105 (12 PDH)Документ27 страницPower Systems - Basic Concepts and Applications - Part Ii: Pdhonline Course E105 (12 PDH)koti_sreedharОценок пока нет
- Tuning of PID Controller of Inverted Pendulum Using Genetic AlgorithmДокумент4 страницыTuning of PID Controller of Inverted Pendulum Using Genetic AlgorithmnguyendattdhОценок пока нет
- An Algorithm For Robust Noninteracting Control of Ship Propulsion SystemДокумент8 страницAn Algorithm For Robust Noninteracting Control of Ship Propulsion SystemmohammadfarsiОценок пока нет
- Parameter Selection in The Sliding Mode Control Design Using Genetic AlgorithmsДокумент8 страницParameter Selection in The Sliding Mode Control Design Using Genetic AlgorithmsnaderjsaОценок пока нет
- Reduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationДокумент14 страницReduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationChengyu NiuОценок пока нет
- Matlab & Simulink Simulation With FPGA-Based Implementation Sliding Mode Control of A Permanent Magnet Synchronous Machine DriveДокумент12 страницMatlab & Simulink Simulation With FPGA-Based Implementation Sliding Mode Control of A Permanent Magnet Synchronous Machine DriveraghuaadsОценок пока нет
- Tutorial Xinda-Hu ImpДокумент8 страницTutorial Xinda-Hu ImpMuhammad SiddiqueОценок пока нет
- Fuzzy Idle Speed ControlДокумент6 страницFuzzy Idle Speed ControlIkhwanul KhairiОценок пока нет
- A Pc-Cluster Based Fully Digital Real-Time Simulation of A Field-Oriented Speed Controller For An Induction MotorДокумент25 страницA Pc-Cluster Based Fully Digital Real-Time Simulation of A Field-Oriented Speed Controller For An Induction MotorSahabat SimatupangОценок пока нет
- Generalized PI Control of Active VehicleДокумент19 страницGeneralized PI Control of Active VehicleilublessingОценок пока нет
- Robust Nonlinear Observer For Flexible Joint Robot Manipulators With Only Motor Position MeasurementДокумент6 страницRobust Nonlinear Observer For Flexible Joint Robot Manipulators With Only Motor Position MeasurementinfodotzОценок пока нет
- PMSMДокумент8 страницPMSMBan KaiОценок пока нет
- Syn Machine 444Документ10 страницSyn Machine 444makroumОценок пока нет
- Avr 555Документ5 страницAvr 555makroumОценок пока нет
- Design of Robust Power System Stabilizer Based On Particle Swarm OptimizationДокумент8 страницDesign of Robust Power System Stabilizer Based On Particle Swarm OptimizationFernando RamosОценок пока нет
- Journal Paper 3Документ12 страницJournal Paper 3Jafaru UsmanОценок пока нет
- Sliding Mode Control of Surface-Mount Permanent-Magnet Synchronous Motor Based On Error Model With Unknown LoadДокумент7 страницSliding Mode Control of Surface-Mount Permanent-Magnet Synchronous Motor Based On Error Model With Unknown LoadDamla SarıtaşОценок пока нет
- Speed Control of DC Motor Using Sliding Mode Control ApproachДокумент5 страницSpeed Control of DC Motor Using Sliding Mode Control ApproachIOSRjournalОценок пока нет
- Lecture 1 Non Linear ControlДокумент21 страницаLecture 1 Non Linear ControlShivan BiradarОценок пока нет
- I Jfs 2281328905800Документ12 страницI Jfs 2281328905800Tawhid Bin TarekОценок пока нет
- 03 2008 JA PS A 1 008 CleanДокумент6 страниц03 2008 JA PS A 1 008 CleanBentarfa IslamОценок пока нет
- An Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangДокумент5 страницAn Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangPadmo PadmundonoОценок пока нет
- APEC 2012-Torque Ripple Reduction of Switched Reluctance Motor (SRM) Drives, With Emotional Controller (BELBIC)Документ8 страницAPEC 2012-Torque Ripple Reduction of Switched Reluctance Motor (SRM) Drives, With Emotional Controller (BELBIC)mmnamaziОценок пока нет
- Sensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverДокумент7 страницSensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverWalid AbidОценок пока нет
- Fuzzy Logic Based Direct Power Control of Induction Motor DriveДокумент11 страницFuzzy Logic Based Direct Power Control of Induction Motor DriveNagulapati KiranОценок пока нет
- A New Control Strategy of A Wind Power Generation andДокумент8 страницA New Control Strategy of A Wind Power Generation andjnyagatoОценок пока нет
- Jeas 0408 94Документ7 страницJeas 0408 94Jun Chee LimОценок пока нет
- Modeling and Control of Active Suspension Using Pismc and SMCДокумент10 страницModeling and Control of Active Suspension Using Pismc and SMCjulioandres2011Оценок пока нет
- Controlling DC Motor Position, Using PID Controller Made by PIC MicrocontrollerДокумент9 страницControlling DC Motor Position, Using PID Controller Made by PIC Microcontrollerminh nguyenОценок пока нет
- Motor Modeling and Position Control Lab Week 3: Closed Loop ControlДокумент14 страницMotor Modeling and Position Control Lab Week 3: Closed Loop ControlJanett TrujilloОценок пока нет
- Sliding Mode Brushless DC Motor Current Torque Control AlgorithmsДокумент6 страницSliding Mode Brushless DC Motor Current Torque Control Algorithmscarolain_msОценок пока нет
- Synthesis of The Adaptive Excitation Control System of High Power Synchronous GeneratorsДокумент14 страницSynthesis of The Adaptive Excitation Control System of High Power Synchronous Generators3KaiserEОценок пока нет
- Ijest11 03 06 125 PDFДокумент9 страницIjest11 03 06 125 PDFRamesh EpiliОценок пока нет
- Transient Stability Analysis of Power System Using MatlabДокумент5 страницTransient Stability Analysis of Power System Using MatlabSaddam HussainОценок пока нет
- Ajms 481 23Документ20 страницAjms 481 23BRNSS Publication Hub InfoОценок пока нет
- STP ResultsДокумент1 страницаSTP Resultscoep05Оценок пока нет
- Z Transform ExamplesДокумент3 страницыZ Transform Examplescoep05Оценок пока нет
- Examples On DFTДокумент15 страницExamples On DFTcoep05Оценок пока нет
- DFT PropertiesДокумент15 страницDFT Propertiescoep05Оценок пока нет
- Three Reasons Why Signal Processing Is The Career of The FutureДокумент2 страницыThree Reasons Why Signal Processing Is The Career of The Futurecoep05Оценок пока нет
- Basic DT SignalsДокумент4 страницыBasic DT Signalscoep05Оценок пока нет
- ListДокумент1 страницаListcoep05Оценок пока нет
- MATLAB Plot SymbolsДокумент2 страницыMATLAB Plot Symbolscoep05Оценок пока нет
- MATLAB PlotsДокумент2 страницыMATLAB Plotscoep05Оценок пока нет
- Common Symbols Used in Set Theory: in The Examples C (1,2,3,4) and D (3,4,5)Документ3 страницыCommon Symbols Used in Set Theory: in The Examples C (1,2,3,4) and D (3,4,5)coep05Оценок пока нет
- Ref For Equation Greek Alphabet SymbolsДокумент1 страницаRef For Equation Greek Alphabet Symbolscoep05Оценок пока нет
- Boarding Pass (Web Check-In) Goindigo - inДокумент1 страницаBoarding Pass (Web Check-In) Goindigo - incoep05Оценок пока нет
- ListДокумент1 страницаListcoep05Оценок пока нет
- IEEE Journals NamesДокумент22 страницыIEEE Journals Namescoep05Оценок пока нет
- Chapter 21: RLC CircuitsДокумент33 страницыChapter 21: RLC CircuitsVibhor GulatiОценок пока нет
- Sheet 2-Circuit Magnetic PDFДокумент14 страницSheet 2-Circuit Magnetic PDFMarcos Silva MonteloОценок пока нет
- RM Asssignemnt1 W 2019 PDFДокумент1 страницаRM Asssignemnt1 W 2019 PDFcoep05Оценок пока нет
- AC - Circuits - Single Phase AC CircuitsДокумент5 страницAC - Circuits - Single Phase AC Circuitscoep05Оценок пока нет
- AC Circuits-1Документ11 страницAC Circuits-1coep05100% (1)
- Guidelines For Submission in WEEF 2019Документ1 страницаGuidelines For Submission in WEEF 2019coep05Оценок пока нет
- DesktopДокумент1 страницаDesktopcoep05Оценок пока нет
- Equation Help For Greek Alphabet Letters and SymbolsДокумент1 страницаEquation Help For Greek Alphabet Letters and Symbolscoep05Оценок пока нет
- Ch31 AC CircuitsДокумент88 страницCh31 AC CircuitssygwapoooОценок пока нет
- RM Asssignemnt1 W 2019 PDFДокумент1 страницаRM Asssignemnt1 W 2019 PDFcoep05Оценок пока нет
- Search: Upload Saved Bestsellers Books Audiobooks Magazines Documents Sheet MusicДокумент7 страницSearch: Upload Saved Bestsellers Books Audiobooks Magazines Documents Sheet Musiccoep05Оценок пока нет
- HB With DiodeДокумент1 страницаHB With Diodecoep05Оценок пока нет
- Computer Processor HistoryДокумент8 страницComputer Processor Historycoep05Оценок пока нет
- Floor Plan+EEДокумент2 страницыFloor Plan+EEcoep05Оценок пока нет
- Prin Ket JSF - PNR 4858607224 B 28-Nov-2017 0Документ2 страницыPrin Ket JSF - PNR 4858607224 B 28-Nov-2017 0coep05Оценок пока нет
- DP November 2017 Examination Schedule en PDFДокумент4 страницыDP November 2017 Examination Schedule en PDFSuperlucidoОценок пока нет
- Valdez, Shenny RoseДокумент3 страницыValdez, Shenny Roseyeng botzОценок пока нет
- RD Sharma Class8 SolutionsДокумент2 страницыRD Sharma Class8 Solutionsncertsoluitons100% (2)
- Bulk Material/Part Ppap Process Checklist / Approval: Required?Документ32 страницыBulk Material/Part Ppap Process Checklist / Approval: Required?krds chidОценок пока нет
- Danika Cristoal 18aДокумент4 страницыDanika Cristoal 18aapi-462148990Оценок пока нет
- Bravo MRI II Operation ManualДокумент45 страницBravo MRI II Operation ManualLuis100% (1)
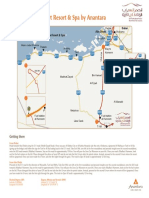
- Qasr Al Sarab Desert Resort Location Map June2012Документ1 страницаQasr Al Sarab Desert Resort Location Map June2012Anant GârgОценок пока нет
- Exam 3 DynamicsДокумент7 страницExam 3 DynamicsJulioОценок пока нет
- The Practical Reference Guide ForДокумент4 страницыThe Practical Reference Guide Forelias667Оценок пока нет
- Contoh CV / Daftar Riwayat HidupДокумент2 страницыContoh CV / Daftar Riwayat HiduprusmansyahОценок пока нет
- TheBasicsofBrainWaves - RS PDFДокумент4 страницыTheBasicsofBrainWaves - RS PDFOnutu Adriana-LilianaОценок пока нет
- VavДокумент8 страницVavkprasad_56900Оценок пока нет
- Etoricoxib - Martindale 39thДокумент2 страницыEtoricoxib - Martindale 39thCachimbo PrintОценок пока нет
- Electronic Ticket Receipt, January 27 For MS NESHA SIVA SHANMUGAMДокумент2 страницыElectronic Ticket Receipt, January 27 For MS NESHA SIVA SHANMUGAMNesha Siva Shanmugam ShavannahОценок пока нет
- Basics of Population EducationДокумент4 страницыBasics of Population EducationLAILANIE DELA PENAОценок пока нет
- Pitot/Static Systems: Flight InstrumentsДокумент11 страницPitot/Static Systems: Flight InstrumentsRoel MendozaОценок пока нет
- Blue Modern Company Profile PresentationДокумент15 страницBlue Modern Company Profile PresentationjaneОценок пока нет
- 3397 - Ciat LDC 300VДокумент71 страница3397 - Ciat LDC 300VPeradОценок пока нет
- 3M Novec 1230 Fire Protection Fluid FAQДокумент8 страниц3M Novec 1230 Fire Protection Fluid FAQEden CansonОценок пока нет
- Rectifier 5G High Density Embedded Power (3U Power Rack, Three Phase Four Wire) E...Документ4 страницыRectifier 5G High Density Embedded Power (3U Power Rack, Three Phase Four Wire) E...Lintas LtiОценок пока нет
- ANG DELAVEGA FinalPositionPaperДокумент6 страницANG DELAVEGA FinalPositionPaperZane IbalaОценок пока нет
- Phrasal Verbs Related To HealthДокумент2 страницыPhrasal Verbs Related To HealthKnuckles El Naco Narco LechugueroОценок пока нет
- Tabla9 1Документ1 страницаTabla9 1everquinОценок пока нет
- Atomic St. Package PDFДокумент28 страницAtomic St. Package PDFSatvik RaoОценок пока нет