Вам также может понравиться
- Calculo Guia 3Документ12 страницCalculo Guia 3RAFAEL MONROYОценок пока нет
- Cambio de Pastillas de Frenos de b12m PDFДокумент7 страницCambio de Pastillas de Frenos de b12m PDFDaniel Alex SánchezОценок пока нет
- Sustentacion Trabajo ColaborativoДокумент6 страницSustentacion Trabajo ColaborativoDOUGLAS JULIAN PLAZA RANGELОценок пока нет
- Capacitacion Byd b13 - b93 Semana 3Документ201 страницаCapacitacion Byd b13 - b93 Semana 3andrestkapinzongmail.comОценок пока нет
- Parcial Programacion EstocasticaДокумент16 страницParcial Programacion EstocasticaMayra Alejandra FuentesОценок пока нет
- SimulacionДокумент15 страницSimulacionjehimy santana0% (1)
- Logística líder ServientregaДокумент11 страницLogística líder ServientregaMARKETING AND ADVERTISINGОценок пока нет
- Espiral logarítmica y velocidad del sonido en el océanoДокумент10 страницEspiral logarítmica y velocidad del sonido en el océanomichell sandoval hernandez0% (1)
- Gerencia estratégica de AviancaДокумент38 страницGerencia estratégica de AviancaJorge RodriguezОценок пока нет
- Daños A La SaludДокумент5 страницDaños A La SaludJORGE LUIS BERNARDОценок пока нет
- Evaluacion Final - Escenario 8 - Segundo Bloque-Teorico - Practico - Costos y PresupuestosДокумент14 страницEvaluacion Final - Escenario 8 - Segundo Bloque-Teorico - Practico - Costos y PresupuestosLUIS ALBERTO GUERRA GUATAQUIОценок пока нет
- Entrega 2 M.BДокумент13 страницEntrega 2 M.BMalejitaPachecoОценок пока нет
- Parcial Semana 6 PrácticaДокумент11 страницParcial Semana 6 PrácticaJonnathan VillalobosОценок пока нет
- MTBFДокумент32 страницыMTBFmarcalasanОценок пока нет
- Segunda Entrega Intervalos de Confianza Simulación Grupo 14Документ4 страницыSegunda Entrega Intervalos de Confianza Simulación Grupo 14Anthony Molina0% (1)
- PROYECTO PROGRAMACION ESTOCASTICA - Entrega 1 - Grupo 10Документ4 страницыPROYECTO PROGRAMACION ESTOCASTICA - Entrega 1 - Grupo 10Dario CuellarОценок пока нет
- Practico - Programacion Estocastica - (Grupo b04)Документ10 страницPractico - Programacion Estocastica - (Grupo b04)duban blancoОценок пока нет
- Pensamiento Algoritmico Entrega Final 7Документ4 страницыPensamiento Algoritmico Entrega Final 7yeyisОценок пока нет
- Informe técnico diseño sistema protección hidráulicoДокумент7 страницInforme técnico diseño sistema protección hidráulicoLawdy Ardila PОценок пока нет
- SolucionadoДокумент8 страницSolucionadooswaldo DiazОценок пока нет
- Parcial 1 - Compras y Aprovisionamiento - RusДокумент14 страницParcial 1 - Compras y Aprovisionamiento - Rusrobinson1975100% (1)
- Costos y Presupuestos Evaluacion FinalДокумент9 страницCostos y Presupuestos Evaluacion FinalMireyaОценок пока нет
- Segunda Entrega Simulación Sub #1Документ4 страницыSegunda Entrega Simulación Sub #1Robinson Vacca PeñaОценок пока нет
- Consolidado TermodinamicaДокумент6 страницConsolidado TermodinamicaAndrea IbañezОценок пока нет
- Programación estocástica y probabilidad de resultados tenísticosДокумент23 страницыProgramación estocástica y probabilidad de resultados tenísticosPablo TorresОценок пока нет
- Trabajo Colaborativo Gestion Logistica 3Документ31 страницаTrabajo Colaborativo Gestion Logistica 3Dumar Noscue100% (2)
- Examen - Quiz - Escenario 3Документ8 страницExamen - Quiz - Escenario 3alexander100% (1)
- Convenio-Sena-Tecnologia-Ingenieria-Industrial-Virtual - PENSUM PDFДокумент1 страницаConvenio-Sena-Tecnologia-Ingenieria-Industrial-Virtual - PENSUM PDFDaniel PizaОценок пока нет
- Parcial - Escenario 4 - Primer Bloque-Teorico - Practico - Distribucion de Planta - (Grupo b03)Документ10 страницParcial - Escenario 4 - Primer Bloque-Teorico - Practico - Distribucion de Planta - (Grupo b03)Fausto Mauricio Galeano M.Оценок пока нет
- Gestión de flujos y calidad totalДокумент5 страницGestión de flujos y calidad totalClaudia AnguloОценок пока нет
- El Cataclismo de DamoclesДокумент4 страницыEl Cataclismo de DamoclesMöNiiAlejandraSolorzanoОценок пока нет
- Actividad de Puntos Evaluables - Escenario 2 - Primer Bloque-Teorico - Practico - Procesos Industriales - (Grupo b04)Документ5 страницActividad de Puntos Evaluables - Escenario 2 - Primer Bloque-Teorico - Practico - Procesos Industriales - (Grupo b04)olga portela rodriguezОценок пока нет
- Evaluación de procesos estocásticos discretos y continuosДокумент5 страницEvaluación de procesos estocásticos discretos y continuossantiagoОценок пока нет
- Informe Final Laboratorio 3Документ9 страницInforme Final Laboratorio 3Xinia Jimenez BadillaОценок пока нет
- Fisica 3Документ5 страницFisica 3Sebastian MontanoОценок пока нет
- Trabajo Colaborativo Distribucion de Planta (3) KWMДокумент23 страницыTrabajo Colaborativo Distribucion de Planta (3) KWMDuvan MejiaОценок пока нет
- Actividad de Puntos Evaluables - Escenario 2 - COMPRAS Y APROVISIONAMIENTO - (GRUPO B01)Документ5 страницActividad de Puntos Evaluables - Escenario 2 - COMPRAS Y APROVISIONAMIENTO - (GRUPO B01)Alejandro Bernal100% (1)
- Final Estocastica Semana 8 ParcialДокумент10 страницFinal Estocastica Semana 8 ParcialEdison TapascoОценок пока нет
- Actividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-TEORICO - PRACTICO - COMPRAS Y APROVISIONAMIENTO - (GRUPO B01)Документ5 страницActividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-TEORICO - PRACTICO - COMPRAS Y APROVISIONAMIENTO - (GRUPO B01)Alejandro BernalОценок пока нет
- Implementación fallida del WMS en FortipastaДокумент11 страницImplementación fallida del WMS en Fortipastahector torresОценок пока нет
- 3 Cuidado Del VehiculoДокумент14 страниц3 Cuidado Del VehiculoLuis Carlos Ceron Correa100% (1)
- Conexiones A CarroceriaДокумент14 страницConexiones A CarroceriaJose Manuel Rodriguez GonzalezОценок пока нет
- Actividad de Puntos Evaluables - Escenario 2 - Primer Bloque-Teorico - Practico - Programacion Estocastica - (Grupo b04) 50 - 50Документ5 страницActividad de Puntos Evaluables - Escenario 2 - Primer Bloque-Teorico - Practico - Programacion Estocastica - (Grupo b04) 50 - 50Leidy TarazonaОценок пока нет
- Evaluación final Física IДокумент8 страницEvaluación final Física Imagaly urregoОценок пока нет
- Investigación de Operaciones-6Документ5 страницInvestigación de Operaciones-6Wilson Gomez BoteroОценок пока нет
- Plantilla Segunda Entrega Simulación-4Документ4 страницыPlantilla Segunda Entrega Simulación-4AndresMauricioGarciaPinzonОценок пока нет
- Quiz 1 Calculo 2 PDFДокумент220 страницQuiz 1 Calculo 2 PDFAleja Perilla100% (1)
- Entrega 3 Final Trabajo Grupal Gestión de Transporte y DistribuciónДокумент16 страницEntrega 3 Final Trabajo Grupal Gestión de Transporte y DistribuciónIng Jhon RomeroОценок пока нет
- AbsДокумент23 страницыAbsCarlos Daniel Guevara CorreaОценок пока нет
- Examen - Parcial - Escenario 4Документ9 страницExamen - Parcial - Escenario 4leslie velasquezОценок пока нет
- Trabajo Final Mate Superficies Parametricas y Sus AreasДокумент15 страницTrabajo Final Mate Superficies Parametricas y Sus Areasbeicon100% (1)
- Evidencia 1 Presentación "Caracterización de La Empresa"Документ10 страницEvidencia 1 Presentación "Caracterización de La Empresa"LeidyОценок пока нет
- Evaluacion Final COSTOS Y PRESUPUESTOS Primer IntentoДокумент9 страницEvaluacion Final COSTOS Y PRESUPUESTOS Primer IntentoJohnny GrisalesОценок пока нет
- Actividad de Puntos Evaluables - Escenario 2 - Primer Bloque-Teorico - Practico - Virtual - Investigación de Operaciones - (Grupo b06)Документ5 страницActividad de Puntos Evaluables - Escenario 2 - Primer Bloque-Teorico - Practico - Virtual - Investigación de Operaciones - (Grupo b06)Jairo Gallego ParraОценок пока нет
- Implementación de un robot móvil para el transporte de personas con discapacidad basado en ArduinoДокумент8 страницImplementación de un robot móvil para el transporte de personas con discapacidad basado en Arduinogonzalo lopezОценок пока нет
- INTELIGENCIAДокумент13 страницINTELIGENCIAggomezОценок пока нет
- Tipos de Robots Industriales y sus TrayectoriasДокумент14 страницTipos de Robots Industriales y sus TrayectoriasHera LuceroОценок пока нет
- Mecanismo RoboticoДокумент9 страницMecanismo RoboticoclintonОценок пока нет
- Unidad I. Fundamentos BasicosДокумент28 страницUnidad I. Fundamentos BasicosDiego NavaОценок пока нет
- 1.3 SubsistemasДокумент5 страниц1.3 SubsistemasYesi Salazar LimasОценок пока нет
- Impresora 3DДокумент1 страницаImpresora 3DSerafin AltamiranoОценок пока нет
- Auto MovilДокумент2 страницыAuto MovilSerafin AltamiranoОценок пока нет
- Corriente AlternaДокумент1 страницаCorriente AlternajriosvarОценок пока нет
- Vectores PDFДокумент1 страницаVectores PDFSerafin AltamiranoОценок пока нет
- Cálculo VectorialДокумент2 страницыCálculo VectorialJose Luis CondoriОценок пока нет
- Qué Es Un Led SMDДокумент1 страницаQué Es Un Led SMDSerafin AltamiranoОценок пока нет
- Qué Es y Cómo Funciona El Sensor de Oxígeno Del AutoДокумент1 страницаQué Es y Cómo Funciona El Sensor de Oxígeno Del AutoSerafin AltamiranoОценок пока нет
- AVIÓNДокумент1 страницаAVIÓNSerafin AltamiranoОценок пока нет
- El Cálculo DiferencialДокумент2 страницыEl Cálculo DiferencialSerafin AltamiranoОценок пока нет
- Un TransformadorДокумент6 страницUn TransformadorSerafin AltamiranoОценок пока нет
- Vectores PDFДокумент1 страницаVectores PDFSerafin AltamiranoОценок пока нет
- Numeros Complejos PDFДокумент1 страницаNumeros Complejos PDFSerafin AltamiranoОценок пока нет
- ElectronicaДокумент1 страницаElectronicaSerafin AltamiranoОценок пока нет
- Tinta ConductoraДокумент1 страницаTinta ConductoraSerafin AltamiranoОценок пока нет
- Sensor EsbДокумент23 страницыSensor EsbMiguel Angel Aguilar MoreiraОценок пока нет
- Estrober LED 220V 80 LEDsДокумент10 страницEstrober LED 220V 80 LEDsBryAn CAutiОценок пока нет
- Instrumentacion IndustrialДокумент6 страницInstrumentacion IndustrialSerafin AltamiranoОценок пока нет
- CarroДокумент18 страницCarroSerafin AltamiranoОценок пока нет
- Puertas LogicasДокумент0 страницPuertas Logicasedeive7369Оценок пока нет
- Practica 1Документ4 страницыPractica 1Serafin AltamiranoОценок пока нет
- Compuertas DibujoДокумент4 страницыCompuertas DibujoSerafin AltamiranoОценок пока нет
- Estrober LED 220V 80 LEDsДокумент10 страницEstrober LED 220V 80 LEDsBryAn CAutiОценок пока нет
- Tormenta de IdeasДокумент11 страницTormenta de IdeasSerafin AltamiranoОценок пока нет
- Comuerta Logica DefinicionДокумент15 страницComuerta Logica DefinicionFrank RomeroОценок пока нет
- Compuertas DibujoДокумент4 страницыCompuertas DibujoSerafin AltamiranoОценок пока нет
- Un Líder AutocráticoДокумент1 страницаUn Líder AutocráticoSerafin AltamiranoОценок пока нет
- Compuertas DibujoДокумент4 страницыCompuertas DibujoSerafin AltamiranoОценок пока нет
- Tormenta de IdeasДокумент11 страницTormenta de IdeasSerafin AltamiranoОценок пока нет
- Apuntes Procedimientos Const. IДокумент119 страницApuntes Procedimientos Const. IAR Ramsés100% (1)
- Principales Hallazgos de La Comisión Investigadora Sobre Los DerramesДокумент153 страницыPrincipales Hallazgos de La Comisión Investigadora Sobre Los DerramesJuan Carlos Ruiz MolledaОценок пока нет
- Consumible de SoldaduraДокумент6 страницConsumible de SoldaduraLuis GarciaОценок пока нет
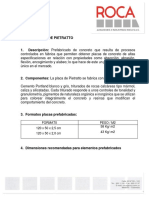
- Ficha Técnica GENERAL PIETRATTOДокумент3 страницыFicha Técnica GENERAL PIETRATTOAnglica VargasОценок пока нет
- Ok Fundicion y Colada 2014Документ43 страницыOk Fundicion y Colada 2014juancarlosjuaquinОценок пока нет
- E 3 Tabla 3 Trabajos Energizados y DesenergizadosДокумент1 страницаE 3 Tabla 3 Trabajos Energizados y DesenergizadosCarmen Castillo0% (1)
- Wilcom Actualización Manual de Usuario 9.0Документ59 страницWilcom Actualización Manual de Usuario 9.0ccoco10100% (1)
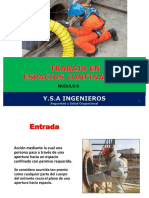
- Espacios Confinados Modulo IIДокумент23 страницыEspacios Confinados Modulo IICHRISTOPHER ALMONTE ALVARADO100% (1)
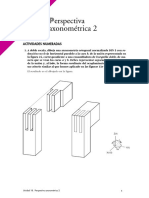
- Perspectiva axonométrica 2: 18 dibujosДокумент48 страницPerspectiva axonométrica 2: 18 dibujosÁngel CasoОценок пока нет
- Ejemplo de Minimización Modelo EstandarДокумент2 страницыEjemplo de Minimización Modelo Estandarhernan0% (1)
- Ecuaciones de Diseño para Evaporadores de Simple EfectoДокумент5 страницEcuaciones de Diseño para Evaporadores de Simple EfectoRichard Icaro Esparza100% (2)
- Trazado de EngranajesДокумент22 страницыTrazado de EngranajesDavid PerdomoОценок пока нет
- MATERIAL IV Semana 4 Diseño de EscaleraДокумент8 страницMATERIAL IV Semana 4 Diseño de EscalerasoledadОценок пока нет
- Filtros 2019-2Документ31 страницаFiltros 2019-2Alejandro LozanoОценок пока нет
- Practica 5 Peso VolumetricoДокумент10 страницPractica 5 Peso VolumetricoluisОценок пока нет
- Paper Gestion HseДокумент13 страницPaper Gestion Hseyani rodriguezОценок пока нет
- 03 Modos de ControlДокумент34 страницы03 Modos de ControlRay ContrerasОценок пока нет
- Tema 2.1. Introduccion A La Fundicion (Byn)Документ65 страницTema 2.1. Introduccion A La Fundicion (Byn)Sonia BellonОценок пока нет
- Instalación de radiador modelo Europa C-Xian N en vivienda de C/CanariasДокумент2 страницыInstalación de radiador modelo Europa C-Xian N en vivienda de C/Canariasjosele123Оценок пока нет
- Introduccion e Instrumentos de MedidasДокумент245 страницIntroduccion e Instrumentos de MedidasI-ván F Zandalio100% (1)
- Ficha Tecnica de Lana IsotermДокумент2 страницыFicha Tecnica de Lana IsotermFares WanuzОценок пока нет
- Ficha Tecnica Anti-KleanДокумент2 страницыFicha Tecnica Anti-Kleanmaycol miller medrano riosОценок пока нет
- Presentacion PolipropilenoДокумент46 страницPresentacion PolipropilenoKatiaa AltamiranoОценок пока нет
- CABESTI S.R Secadores Frigorificos FuncionamientoДокумент2 страницыCABESTI S.R Secadores Frigorificos Funcionamientoduque_sadeОценок пока нет
- Antena IsotronДокумент3 страницыAntena IsotronFelipe Valencia100% (1)
- MEMORIA PROYECTO Puerta CorrederaДокумент12 страницMEMORIA PROYECTO Puerta CorrederaJavier Perez MolinaОценок пока нет
- Las Curvas de Las BombasДокумент5 страницLas Curvas de Las Bombasana19064Оценок пока нет
- Suelo ChacarillaДокумент18 страницSuelo ChacarillaLigia HinojosaОценок пока нет
- TECNIFAN TDA Serie Doble AspiracionДокумент50 страницTECNIFAN TDA Serie Doble AspiracionYhonny Valenzuela0% (1)